
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Радиопередающие устройства то с выхода потенциометра можно снять электрическую величину, соответствующую изменению температуры окружающей среды. Весьма часто перемещение свободного конца биметаллического элемента используется для замыкания контактов, когда температура окружающей среды достигает определенной величины.  Датчик поворота Гироскоп Продольная ось объекта Потенциометр f Потенциометр 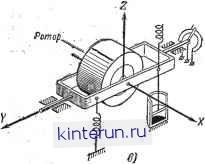 ВозЗушный Вемпсрер Потенциометр ШссиВное тело 0 Направление ускорения г) корпуса датчика Рис. 19-22. Комбинировавные датчики. а - биметаллический: б - гироскопический для измерения углой; в - гироскопический для измерения угловой скорости: г - акселерометр. Угол закручивания биметаллической пластины (<1в.п) определяется из следующего выражения: 1 .SLg.n ( 1 - г) (бмакс - бмнн) Рб-п = 1б.г 1 -1 6ы£ - длина биметаллической пластинки; температурный коэффициент линейного расщирения термоактивной пластинки; - температурный коэффициент линейного расширения термоинертной пластинки; - диапазон изменения темпе-ратур; 6 - толщина биметаллической пружины. Биметаллические датчики широко применяются для измерения температур и в качестве элементов устройств регулирования температурных режимов различных объектов. Гироскопический датчик В качестве воспринимающего элемента этого типа датчика служит гироскоп. Гироскоп представляет собой механическое устройство, состоящее из быстро вращающегося ротора и колец карданного подвеса. Карданный подвес дает возможность ротору свободно вращаться относительно двух других осей. Быстровращающийся ротор обладает большой инерцией и оказывает противодействие попыткам изменить положение оси вращения. Гироскопическая инерция является одним из основных свойств гироскопа. Она тем выше, чем больще масса ротора, чем дальше масса ротора удалена от оси вращения и чем больше скорость вращения ротора. Свойство гироскопической инерции (устойчивости) широко используется в системах стабилизации и управления движением кораблей, самолетов, ракет и других движущихся объектов. Гироскоп используется также в качестве чувствительного элемента комбинированных датчиков, посредством которых измеряются углы поворота движущегося объекта относительно трех его осей. На рис. 19-22, б представлена схема ком-бинированного гироскопического датчика угла поворота движущегося объекта. На корпусе гироскопа укрепляется потенциометр, подвижный контакт которого связывается с внешней рамкой карданного подвеса гироскопа. Если датчик укрепить на корпусе объекта с учетом положения его продольной оси так, как это показано на рис 19-22,6, то при изменении курса объекта (положения продольной оси неподвижного объекта) на выходе потенциометра появится напряжение, пропорциональное углу отклонения продольной оси. С помощью гироскопа может быть измерена скорость поворота движущегося объекта около любой из трёх его осей. Ги-роской в этом слуйе имееф в карданном подвесе не два кольца, а Только одно (рис. 19-20, в). Иначе говоря, гироскоп, реагирующий на угловую скорость, имеет только две степени свободы, а не три, как гироскоп, измеряющий величину углов поворота осей объекта. Пусть ось собственного вращения гироскопа совпадает с осью ох. Если вращать корпус гироскопа вокруг оси ог, то возникает момент гироскопической реакции, под действием которого начинается прецессия (вращение) вокруг оси оу. Этой прецессии противодействуют центрирующие пружины. Момент, создаваемый пружинами, пропорционален углу поворота рамки 1ироскопа. При такой конструкции гироскопа, соответствующем выборе жесткости центрирующих пружин и подборе степени демпфирования (затухание критическое) можно считать, что угол поворота рамки гироскопа пропорционален скорости вращения корпуса гироскопа вокруг оси ог. На корпус двухстепенного гироскопа, предназначенного для измерения угловой скорости, прикрепляется потенциометрический датчик, подвижный контакт Которого связан с осью рамки гироскопа. При развороте корпуса гироскопа на выходе потенциометра появится напряжение, пропорциональное скорости разворота. В гироскопическом датчике для измерения угловой скорости в результате взаимодействия упругой силы пружины и инерционной силы гироскопа при переходе рамки из одного положения S другое могут возникнуть автоколебания. Для их гащения применяются воздушные или жидкостные демпфирующие устройства. Датчики ускорений (акселерометры) С помощью акселерометра линейное ускорение преобразуется в электрическое напряжение. Воспринймаюйшм элементом акселерометра (рис. 19-22, г) является инерционное тело, свободно насаженное иа ось. Движение тела вдоль оси ограничивается пружинами. При действии линейного ускорения вдоль оси массивное тело за счет инерции смещается относительно корпуса датчика в сторону, обратную направлению ускорения. Ускорение, такик образом, преобразуется в линейное Перемещение. При смещении массивного тела с ним вместе перемещается и движок потенциометра. На выходе потенциометра образуется напряжение, величина и полярность которого соответствуют вели-<шне й направлению ускорения. Величина инерционной силы, действующей йа пружины при наличии ускорения, может быть найдена из известного выражения F H = am = Р, т(Р)- масса (вес) подвижной части ак-селеро1метра; g -ускорение (g=9,8 м/сек). Под действием инерционной силы пружины акселерометра будут деформироваться (одна сжиматься, другая растягиваться). Величина смещения массивного тела при этом составит: X - f ин - где т] - результирующая жесткость двух пружин. Последнее выражение представляет собой статическую характеристику воспринимающего элемента акселерометра, справедливую для уст-ановившегося процесса при а=const. Величина выходного напряжения акселерометра, характеризующая измеряемое ускорение, определится из выражения Е РЕ вых = X-- =--а. макс W макс Чувствительность акселерометра Af/Bb,x РЕ Квкс- (19-30) где с- действующее усжорение При изменении величины ускорения в воспринимающем элементе акселерометра происходит переходный процесс, во время которого нарушается пропорциональность связи между действующим на входе ускорением и выходным смещением инерционной массы! Зависимость выходной величины от входной в динамическом режиме находится из решения дифференциального уравнения, составленного для механической колебательной системы, которую представляет собой воспринимающий элемент акселерометра. Для улучшения динамических характеристик акселеро1метра и, в частности, для устранения автоколебаний, которые могут возникнуть в его воспринимающем элементе в результате взаимодействия сил упругости и сил инерции, применяются воздушные или жидкостные (масляные) демпферы. Акселерометры широко используются в так называемых инерциальных системах для измерения скорости й пройденного пути движущихся объектов. В таких системах акселерометр устанавливается на движущемся объекте так, чтобы его ось, по которой смещается массивное тело, была расположена в направлении движения (продольного, поперечного), параметры которого измеряются. Известно, что между ускорениями, скоростями и смещениями движущихся тел существует определенная зависимость, заключающаяся в том, что скорость есть интеграл от ускорения, а пройденный путь, характеризующий координаты объекта, есть интеграл от скорости. Поэтому скорость движения объекта в некотором направлении может быть опреде- лена интегриэованием выходного напряжения акселеро1метра, установленного указанным выше образом йо отношению к направлению движения, J J Аакс Аако J Udt. С помощью вторичного интегрирования может быть определен путь, пройденный объектом за некоторое время t (время интегрирования) t t t 1= [Va6dt J J 0 0 Если на движущемся объекте установить два акселерометра, оси которых будут совпадать одна с продольным, а другая с поперечным направлением движения, то с помощью такой системы при двойном интегрировании выходных напряжений акселерометров могут измеряться координаты Движущихся объектов. Датчики расхода жидкостей и газов Расход жидкостей или газов измеряется их количеством, выражаемым объемом или весом, израсходованным в единицу времени. Расходомеры строятся на использовании следующих физических.явлений: 1. При протекании жидкости или газа через сужающееся устройство с двух сторон этого устройства образуется перепад давлений, определяемый весовым расходом. 2. Если среда движется по крнёолиней-ному каналу, то в точках с равной кривизной за счет центробежных сил образуется перепад давлений, пропорциональный весу и квадрату скорости движения среды. 3. При торможении движущегося потока возникает избыточное давление, пропорциональное квадрату скорости невозмущенного движения потока. 4. Если нагретое тело поместить в поток жидкости или газа, то теплоотдача тела будет зависить от скорости движения потока. 5. При протекании жидкости через пористую перегородку или сужающееся устройство возникает разность электрических потенциалов, пропорциональная расходу. На рис. 19-23 приведена схема расходомера, основанного на измерении перепада давления на сужающемся устройстве, установленном на пути движущейся среды. Простейшим сужающимся устройством является диафрагма, которая встраивается в трубопровод. Перед диафрагмой со стороны набегающего потока образуется давление pi, а с противоположной стороны диафрагмы - давление причем при движении потока Всегда pi>p2. Соотношение, определяющее зависимость расхода от перепада давления для несжимаемых жидкостей, имеет следующий вид: (Pi -Рг), м/сек; G = ftSo Ygy (pi - Pi), ке/сек, Q - объемный расход; G - весовой расход; So=nd/4 - сечение отверстия диафрагмы; Y - удельный вес среды; h - коэффициент расхода, зависящий от геометрической формы сужающегося устройства и от числа Рейнольдса.  Рис. 19-23. Схема расходомера. С обеих сторон диафрагмы в трубопроводе имеются отверстия, к которым подключается датчик перепадов давления. С выхода датчика снимается напряжение, пропорциональное разности давлений pi - р. Это напряжение измеряется электрическим вольтметром, шкала которого с учетом вышеприведенных зависимостей градуируется в единицах расхода. Для определения общего расхода жидкости или газа за некоторый промежуток времени необходимо выходное напряжение датчика перепада давления проинтегрировать. Простейшим интегратором может быть малоинерциоиный электрический двигатель, вал которого связан с цифровым механическим счетчиком. Датчики скоростного напора При торможении движущегося потока жидкости или газа возникает избыточное давление, пропорциональное квадрату начальной скорости потока. Это свойство используется для устройства датчиков скоростного напора, посредством которых измеряется средняя скорость потока.- Зависимость избыточного давления потока от начальной скорости при его торможении в некотором его сечении определяется на основании уравнения Бернулли и имеет следующий вид: Ризб = hy
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


