
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Распространение радиоволн 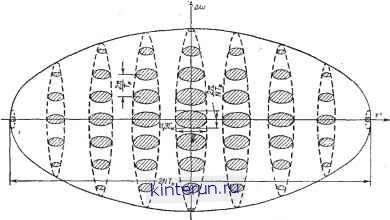 Рис. 3-24 Сечение тела неопределенности для пачки когерентных сигналов. лированные импульсы с прямоугольной огибающей длительностью 3 мксек. Найдем величину потенциальной разре-щающей способности по дальности, используя выражение (3-16), 6 (D)noT = - 6(т)пот=- = 0,45 км. (3-40) Конечные размеры пятна увеличивают протяженность отметки сигнала по щкале дальности на величину диаметра пятна. Поэтому дополнительное ухудшение разрешающей способности в индикаторе можно найти, вычислив цену пятна в километрах: 6 (D) = dn 1-300 Отсюда По=1 + 0,45 = 1 кл. (3-41) и реальная разрешающая способность 6(D) ==3-0,45 1.5 км. Аналогичным образом могут быть определены коэффициенты ухудшения и величины реальных разрешающих способностей н по другим параметрам. 3-5. ТОЧНОСТЬ ИЗМЕРЕНИЯ ПАРАМЕТРОВ СИГНАЛОВ Наличие помех на входе и внутри приемного устройства приводит к появлению случайных ошибок Измерений параметров сигнала (систематические ошибки в принципе могут быть всегда устранены). Точность измерений определяется величиной ошибки с обязательным указанием ее категории (средняя, среднеквадратическая и т. д.). Наиболее часто пользуются среднеквадра- тическими ошибками. Закон распределения ошибок в большинстве случаев является нормальным. Факторами, влияющими на точность нз-мерення параметров сигнала являются: отношение энергии принимаемого сигнала к энергии шумов, форма входного сигнала степень совершенства выполнения отдельных узлов радиотехнического устройства, метод отсчета и допускаемое время измерения, условия распространения радиоволн. Точность работы устройства может быть определена экспериментально или расчетным путем. Экспериментальный метод надежен и прост, но применим к уже действующей аппаратуре. Прн проектировании устройства, к которому предъявляются определенные требования по точности, приходится применять расчетный метод, основанный на расчете отдельных составляющих общей ошибки, соответствующих каждому из факторов, влияющих на точность измерений. При этом общую ошибку измерения можно разделить на потенциальную ошибку, определяемую формой входного сигнала и отношением энергий снгнал/шум, и ошибку, вызываемую всеми остальными факторами. Такое разделение удобно, потому что потенциальная ошибка определяет предельно-достижимую точность измерений при данных входном сигнале и шумах, а вторая слагающая ошибки характеризует в основном степень совершенства выполнения отдельных узлов радиоустройства (и влияние условий распространения). Рассмотрим вначале вопрос о потенциальной точности измерения параметров сигнала. При измерении следует получить значение параметра (или, как принято считать, оценку), наиболее близкое к истинному. Полученная в конкретном измерении оценка будет случайной величиной. Поэтому следует определить дисперсию оценки, характеризующую разброс оценок относи- тельно истинного значения. Потенциальная точность измерения будет реализована, если будет получена оценка параметра, в среднем наилучшим образом приближающаяся к истинному его значению н имеющая наименьшую дисперсию. Наилучшей оценкой а*о параметра а (времени прихода, частоты) будет оценка, среднее значение которой по множеству измерений совпадает с истинным значением Со, т. е. о = о- (3-40) Такая оценка называется несмещенной. Если к тому же дисперсия оценки является наименьшей из возможных, то такая оценка называется еще и эффективной. Возникает вопрос, как выбрать способ оценки, чтобы получить эти ее положительные качества - несмещенность и эффективность. Процесс оценки (измерение) должен производиться по выходному напряжению приемника (3-8). Будем это выражение в дальнейшем использовать в виде (3-41) где а - измеряемый параметр. Наибольшее распространение имеет способ оценки по максимуму выходного напряжения. Процесс отдельного измерения состоит при этом в определении положения максимума на оси параметра а и соответствующего ему значения параметра а*о. Оценка а*о, полученная таким методом, при условии большого отношения энергий сигнала н шума является несмещенной и асимптотически эффективной. Регулярная составляющая выходного напряжения (сигнальная функция) всегда имеет, максимум при истинном значении параметра о, равный 2R=2EclEm, н является четной функцией а. Случайная составляющая (шумовая функция) имеет средне-квадратическое напряжение, равное корню квадратному нз дисперсии, т. е. -у/2Е (3-42) Если бы случайная составляющая в выходном напряжении отсутствовала, то оценка параметра а*о всегда совпадала бы с истинным значением о, а дисперсия оценки была бы равна нулю. Наличие случайной составляющей приводит к случайному смещению максимума выходного напряжения в каждом из измерений, благодаря чему оценка параметра приобретает дисперсию (оставаясь в среднем несмещенной), тем большую, чем меньше R. Так как при R <gl У R >i?, то и случайная составляющая в выходном напряжении преобладает над регулярной. Однозначное измерение параметра а в этом случае невозможно. Прн (v R~R) уже выявляется максимум, соответствующий регулярной составляющей выходного напряжения. При R > 1 (К R < R) случайная составляющая весь- ма мало влияет на обший характер процесса и выходное напряжение приближенно можно представить в виде сигнальной функции. Именно такие условия н характерны при измерении параметров. Вследствие симметрии сигнальной функции относительно истинного значения параметра о оценка является несмещенной (т. е. а*о - 0=0). Сигнальная функция в большинстве случаев может быть аппроксимирована гауссовой кривой. Это означает, что оценка является также н эффективной, так как гауссово распределение имеет по сравнению с другими видами распределения наименьшую дисперсию. Учитывая физику явлений и суть метода оценки по максимуму выходного напряжения можно заранее предполагать, что точность измерений будет тем выше, чем уже пик автокорреляционной функции и чем больше максимум этой функции по сравнению со среднеквадратическим значением шумов (чем больше отношение энергий сигнал/шум). Следовательно, условия, благоприятные с точки зрения разрешения, установленные в предыдущем параграфе, будут также наиболее благоприятными и с точки зрения повышения точности. Определим дисперсию оценки в случае измерения одного параметра. Оценка параметра а находится из уравнения, определяющего условия существования максимума выходного напряжения д(а). Дисперсия оценки, полученная из этого уравнения, имеет вид: о2 (а) = -!-. (3.44) 2RWo (Аа)д = Эта формула имеет ясную интерпретацию: вторая производная от ЧРо(Аа) при Аа=0 выражает скорость изменения функции вблизи ее максимума или, другими словами, остроту пика функции, и чем больше эта острота, тем выше точность измерения. Точность, естественно, увеличивается при увеличении отношения энергий сигнал/шум. Обычно информация, содержащаяся в высокочастотном заполнении функции ЧРо(Аа), практически не используется. Проводя выкладки для огибающих сигнальной и шумовой функций, придем к практически используемой формуле о2 ( )=-- 2R\Vo{Aa)\ (3-45) Да=0 где l¥o(Aa) - значение второй производной от модуля нормированной автокорреляционной функции по параметру а при а=0. Определим дисперсию оценки времени прихода сигнала в виде частотно-модулированного импульса с гауссовой огибающей. Нормированная автокорреляционная функция по времени для этого случая определяется выражением (3-22). Вторая производная по т имеет виД: %(t)l, = -{y + y (3-46) Дисперсия в соответствии с выражением (3-45) равна: 0=!(Т)=-- Ь2 \ 2nRKl (3-47) Потенциальная ошибка измерения о(Т)пот = среднеквадратическая (3-48) V2nR Кс Анализируя выражения (3-47) и (3-48), заключаем, что ошибка измерения тем меньше, чем больше частотная девиация (чем шире спектр сигнала). При отсутствии частотной модуляции (Ь=0) о (Т)пот = V2itR (3-49) Таким образом, применение частотно-модулированных сигналов позволяет получить большую точность измерения времени по сравнению с немодулированными сигналами той же длительности. Определим дисперсию оценки частоты для того же вида сигнала. Нормированная автокорреляционная функция сигнала по частоте определяется выражением (3-28). Ее вторая производная в точке А(в=0 рав- 1о(Д )и=о==- о2(Дю)=-1- = 2 Rrl (3-50) Потенциальная среднеквадратическая ошибка измерения частоты 2у У~2п а (AcD)noT = -=г = -. (3-51) V2R VR т Из выражений (3-50) и (3-51) видно, что точность измерения частоты тем выше, чем больше длительность импульса и чем боль--ше отношение энергий сигнал/шум. Эта точность одинакова как для немодулирован-ных, так и для ЧМ сигналов, ибо ширина выходного сигнала, отсчитанная по оси Ди при т=0, не изменяется прн изменении девиации частоты (см. § 3-4). Рассмотрим случай одновременной оценки двух параметров. Оценка параметров аир находится по методу максимума путем решения системы уравнений: -;S(a.p)-f - Я(а,Р) = 0; (3-52) -5(a,P)-f-Я(а,Р) = 0. (3-53) Выражения для дисперсий оценок имеют вид: о2(а)= о2(Р) = . где 1-Л2. 2;?¥;(Да)д о 2;?¥ (АР)1др=о ~г ¥;(Да,АР) др ГРо(Д ) Да=0 (3-54) (3-55) (3-56) др=0 При наличии корреляции величин аир, множитель-- больше единицы и точ- ность измерений ухудшается по сравнению со случаем оценки одного параметра. При отсутствии взаимной корреляции а и р ЧР о(Да, ДР)= Он выражения (3-54) и (3-55) переходят в (3-45). Определим дисперсии оценок времени прихода и несушей частоты сигнала в виде частотно-модулированного импульса с гауссовой огибаюшей. Нормированные автокорреляционные функции, вторые производные которых входят в (3-54)-(3-56), определяются выражениями (3-32), (3-22) и (3-28). Значения их вторых производных соответственно равны: ¥;(т,Дш)о = - Дш=0 Ч0(Д)даз=0 Отсюда (Т2 (Дю) = 2у2 , 1 1 62 \ у ) 2R 2л R 262 2у- (3-57) (3-58) Ry R 2у2 2пК; Rxl - . (3-59)
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


