
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Расчет вибропрочности конструкции   2,5...5 ем/off влево *-0-*вправо Перепещенае -* Функция N -> Отклонение, £ а б в Рис. 4.3. Изменение сопротивления регулятора (усилия нажима) в зависимости от перемещения при движениях управления I и 2 классов (а); оптимальное значение лередаюч-ной функции Л и зависимость сопротивления регулятора от величины его отклоиснйяпри движениях управления 3 и 4 классов (6 и в) энергии, необходимой для работы РЭА, а определяет только время, место и характер ввода сигнала управления. Это наиболее характерный вариант работы системы че-ловек-РЭА. Для успешного выбора и конструирования регуляторов в этом Варианте необходимо твердо помнить следующее: - Ч-О - разумный, экономичный и гибкий источник малых, точно дозированных сигналов управления и поэтому пренебрежение к его двигательным навыкам значительно обедняет возможности по выработке и рациональному использованию сигналов управления; - максимальный эффект управления может быть достигнут только при определенных и пропорциональных акту регулировки усилиях, определяемых конкретными параметрами задачи управления. По решаемым задачам регуляторы (органы управления) делят на четыре класса. 1 класс - простые одинарные (дизъюнктивные) движения типа нажима кнопки или поворота рукоятки. Общее число отдельных микродвижений доходит до 80. Усилие нажима и перемещения рабочего органа должны быть такими, чтобы зависимость на первом участке была прямая, на втором - обратная (фиксация выполнения акта переключения), на третьем - резкое возрастание силы нажатия (рис. 4.3,о). 2 класс - повторяющиеся движения вращательного, нажимного или ударного характера. Максимальный темп работы зависит от размеров ру- коятки или кнопки и момента трения. При работе по программе (печатание на машинке) темп ввода сигналов заметно выше, чем при ответе на внешние раздражители, когда сигнал проходит по внешнему контуру управления и длительность лп ~ 0,5 с. 3 класс - двигательные задачи при выполнении точной настройки регулятором по определен ной программе. Общее число отдельных микродвижений до 100. Характеризуются .рабочими (дозировочны ми) и корригирующими движениями Определяющий параметр - передаточное число (функция), значение которого (рис. 4.3, б) оптимально r пределах 2,5 ... 5 см/об (перемещение указателя/число оборотов рукоятки) .1ля уменьшения дрожания руки (что снижает точность управления) регулятор должен иметь некоторый момент сопротивления (рис. 4.3, в) 4 класс - двигательные задачи при выполнении операции слежения за объектами, параметры которых из меняются в процессе слежения (из менение положения отметки на ни цикаторе, совмещение двух стрелок или меток и т. п.). Различают компенсирующее слежение (Ч-О имееп данные только о величине и знаке ошибки) и слежениес преследованием (когда Ч-О имеет данные об изменении входного и выходного сигналов и может оценить ситуацию в целом). При слежении с преследованием можно предвидеть характер изменения ошибки и получить точность в 1,5 ... 2 раза, большую, чем при компенсирующем слежении. . Рис. 4-4. Рекомендуемые (слева и в центре) и нерекомендуемые (справа) сочетания движений регулятора и указателя (а); наиболее целесообразное I и наименее целесообразное 4 сочетания характеров движения регулятора и указателя (б); допустимое (слева), рациональное (в центре) и нерекомендуемое (справа) расположения индикаторов и регуляторов (в)  Го Го ©о©©  © Рекомендации по оптимизации работы Ч-О в роли машины управления Если движение регулятора соответствует движению указателя., то число ошибок в 2 ... 3 раза меньше, чем когда движения не соответствуют (рис. 4.4, а). Целесообразность использования различных видов сочетаний движений указателя и регулятора показана на рис. 4.4, 6. Располо ;ение индикаторов и регуляторов должно соответствовать друг другу (рис. 4.4, в). Возможно их объединение в устройства вида светящейся при нажатии кнопки. При несоответствии положений индикатора и регулятора скорость работы Ч-О падает в 2.4 раза. Если использовать для регулировки сигнала по амплитуде или скорости неподвижные рычаги (управляющий сигнал в виде изменения усилия на головке), то возможно увеличение точности на 25 ... 80% по сравнению с регулировкой качающимся рычагом Количество ошибок управления пропорционально порядку системы (О порядок - движение регулятора непосредственно определяют движение указателя (изменение выходного параметра), 1 порядок - перемещение регулятора пропорциональноскорости изменения выходного параметра, 2 порядок - перемещение регулятора пропорционально ускорению изменения выходного параметра) Для повышения точности управле--ния следует использовать (или вводить) дополнительные контуры управления, различные виДы управления (виды движений) для различных задач управления Для использования гностатических (познавательных) и приспособительных движении руки (что повышает точность и надежность управления) не следует выбирать форму рукоятки точно по хватке руки. Ручное управление выгоднее ножного при точных, но не очень сильных сигналах управления (практически все виды регулировок в РЭА) Движение рук к себе быстрее, но менее точны, а от себя - менее быстры, но более точны Поэтому для быстрых, операций управления следует использовать двин<ения к себе, а для точных - от себя Для плавного и Точного движения регуля- PWH 10...10мм 30...S0MM Р<10Н    60... 80 Mil маис IWmm  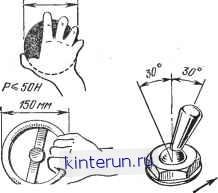        Рис. 4.5. Размеры рукояток в мм и усилия управления (а); характерные формы рычагов управления (6) и схемы ножных педалей (в) во 10 мм
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


