
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Расчет вибропрочности конструкции 4.1. Человек - интегральное звено управления 4. ЧЕЛОВЕК-ОПЕРАТОР* 4 1 ЧЕЛОВЕК-ИНТЕГРАЛЬНОЕ ЗВЕНО УПРАВЛЕНИЯ [1,2, 4, 5] Человек-оператор (Ч-О) является интегральным и определяющим звеном любой системы управления, независимо от степени автоматизации ее работы, им принимаются принципиальные решения, он является Юридическим лицом. Все это заставляет внимательно подходить к вопросам работы Ч-О с РЭА, изучать и рационально использовать его навыки и способности, создавать для Ч-О комфортные условия работы. В соответствии с ГОСТ 21033-75 Ч-О рассматривают как человека, осуществляющего трудовую деятельность посредством взаимодействия с машиной (РЭА) и окружающей средой. Система из Ч-О и РЭА, посредством которой человек осуществляет трудовую деятельность, называется системой человек-машина. В этой системе Ч-О может выступать в различных ролях. Ч-О может выступать в роли приемника осведомительной информации от РЭА, ретранслятора информации от одного ее звена к другому, анализатора информации и исполнителя принятого решения, выполнять программирование работы РЭА или просто исполнять получаемые с помощью РЭА команды. Все эти функции Ч-О выполняет с помощью различных технических устройств в виде индикаторов (представляющих необходимую Ч-О информацию) и регуляторов (с помощью которых Ч-О вводит в РЭА сигналы управления). Для оптимизации связи в системе человек - РЭА необходимо раскодировать или закодировать информацию наивыгоднейшим образом, выполняя подгонку РЭА под способности и возможности Ч-О, а не наоборот, ибо возможности ускорения познавательных процессов (ощущение, восприятие, представление и мышление) весьма незначительны, а перегрузка Ч-О может нарушить нор- Составитель Р. Г. Варламов. мальную работу сложных и ответственных комплексов. Основными стадиями процесса работы системы человек-РЭА являются: восприятие показаний индикаторов, сравнение этих показаний с программой работы РЭА, принятие решения об изменении режима работы РЭА, воздействие на органы управления, реакция РЭА на сигналы управления, работа по новой программе, отражение этого режима на индикаторах и т. п. Определяющими параметрами этого процесса являются: скорость обращения сигнала по контуру, погрешности и надежность работы звеньев системы и скорость обработки информации. Скорость обращения сигналов по контуру зависит от длительности латентного периода соответствующего анализатора /лп (время от момента появления сигнала средней интенсивности до момента ответа Ч-О на него действием), количества приборов, стрелок и знаков на индикаторных устройствах и их сложности, количества регуляторов и их сложности и длительности самопроизвольного отвлечения Ч-О от процесса управления РЭА. Длительность на один сигнал у основных анализаторов лп = 0,09 ... 0,22 с. Сложная по управлению РЭА может потребовать на один цикл управления десятки и сотни секунд от самого квалифицированного оператора. Для повышения скорости обращения сигналов по контуру и приближения его к сумме элементарных лп требуется специальная тренировка Ч-О, создание для него комфортных условий работы и (самое эффективное) сокращение числа регуляторов и индикаторов яо обоснованного минимума. Для уменьшения погрешностей в работе Ч-О и повышения его надежности используют следующие меры: оптимизируют темп приема X и выработки V сигналов (0,5 ... .. 5 бит/с), используют наиболее целесообразную модальность (природу) сигналов, определяют оптимальное соотношение между степенью полноты изображения и его знаково-сгью, представляют Ч-О предвари- 
w во X в 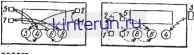 левая руна -у.-у.-правая рут Оператор 1 -Олератор 2 ~ (Рг) Ошонулярте ярение Рте зрения Сигнал улраВления (Рг) © Мононулярное зрение Поле зрения Жвоео елоза 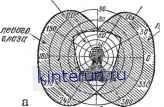 по Области: височная нооовия  ® тельную информацию об особо важных сигналах, оптимизируют процесс управления, используют резервирование операторов (рис. 4.1). Анализаторы Ч-О Анализаторами (органами чувств) называют совокупность рецепторов (в которых под влиянием ра3йран<е-нйй от внешних сигналов различной физической природы возникают возбуждения), нервных волокон (транслирующих эти возбуждения) и участков коры больших полушарий головного мозга (где формируется световое, слуховое, осязательное или иное ощущение). При конструировании РЭА важно знать параметры зрительного, слухового, осязательного и flBHraTejTbHoro анализаторов. Зрительный анализатор включает в себя глаз, зрительный нерв и зрительный центр в затылочных областях коры Головного мозга. На светочувствительной внутренней оболочке глаза - сетчатке - находятся светочувствительные окончания зрительных рецепторов: i>j 130 млн. палочек (черно-белое зрение) и ~ 7млн. колбочек (цветовое зрение). Так как от группы палочек примерно в 100 шт. отходит одно нервное волокно, то они имеют меньшую разрешащую способность, но большую чувствительность, чем колбочки (разрешающая способность выше, чувствитель- Рис. 4.2. Схема полей черно-белого изображения для одного и двух глаз (а) и цветового изображения для левого глаза (б) Рис. 4.1. Представление Ч-О в виде двухстороннего преобразователя (а); амплитудная характеристика Ч-О при перерабоп:; информации и потоках входной Нх и выходной П информации в бит/с (6); амплитудная характеристика Ч-О при формировании сигналов управления и относительных (в процентах) сопротивлениях перемещению Rfi перемещения регулятора х и степеип полноты регулировки /v (в); относительйая доля информации, воспринимаемой посредством зрения, осязания и слуха (г); пример использования суфлирующего сигнала в виде лампочки при приближении стрелки прибора к опасной зоне (д); схемы неупорядоченного (слева) и упорядоченного (справа) расположения регуляторов (с); схема повышения надежности управления (ж) 4.1. Человек - интегральное звено управления ность ниже, зрение цветовое). Основные параметры зрения следующие: бинокулярное цветовое (объемное, двумя глазами) зрение имеет место в области от оси наблюдения ± 30°, бинокулярное черно-белое - от оси наблюдения ± 45°. На рис. 4.2 показаны области различения цвета для различных цветов (самая узкая - зеленый 40... ... 60 , затем красный, синий, желтый). Цветочувствительность зависит от освещения и имеет разницу максимумов на 0,048 мкм при дневном и сумеречном освещении, из-за чего меняется характер цветопередачи. Зависимость между расстоянием наблюдения и погрешностью отсчета показаний на шкале - нелинейная, оптимальное расстояние 300 ... 500 мм, при его увеличении точность отсчета падает Среднее* время наведения глаз в одну точку 0,17 с, точность определения площади двух фигур или их яркости ~ 2%, разрешающая способность по углу до 3 ... 12 при достаточной длительности наблюдений (не менее 0,5 с) Время адаптации при изменении освещенности от единиц до 30 ... 40 мин. Для повышения скорости обработки информации выбирают ее характер, конструкцию индикатора, характер чтения и различимость сиг-нпла. Чем больше внутренняя логическая связь в отдельных сигналах тем большее количество информации Ч-О может воспринять и переработать в единицу времени Например, незнакомая информация воспринимается обычно с темпом 3 бит/с, работа на печатающих устройствах (наличие логической связи между знаками и их последовательностью) - 16 бит/с, считывание информации с выборкой нужной для решения данной задачи - 30 ... 45 Г)НТ/С. Используя разные виды шкал, можно увеличивать число измерений ( мерность стимула), дающих сведения оператору, и скорость считывания и обработки информации. Например, круглая, полукруглая линейная горизонтальная и линейная вертикальная шкалы одной и той же длины и с одинаковым числом делений дают относительные по- грешности 1; 1,6; 2,6 и 3,5. Разница между первой и второй парой шкал объясняется тем, что последние шкалы дают только одномерный стимул сигнала. Так как разрешающая способность глаза по горизонтали выше, чем по вертикали, то при считывании показаний с вертикальной шкалы погрешность больше. Однако если шкала располо ;еиа в пространстве так же, как меняется параметр, то в ряде случаев вертикальная шкала может оказаться более выгодной. Разница в погрешностях считывания с круглой и полукруглой шкалы объясняется уменьшением вдвое в последнем случае угла отклонения (первый параметр- положение указателя на шкале - одинаков для обеих шкал). Более быстро командное чтение, но оно не позволяет оценить ситуацию, ситуационное чтение (панорамный индикатор) - медленнее, но более содержательное. Оптимальное различение сигнала имеет место при его интенсивности в 3 ... 4 раза выше интенсивности фона (шума). Слуховой анализатор включает в себя барабанную перепонку во внутреннем конце наружного уха, полость среднего уха с системой слуховых косточек и внутреннее ухо с улиткой и ~ 20 ООО поперечно натянутых волокон разной длины, которые и представляют собой слуховой рецептор. Основные параметры слуха еле-, дующие: диапазон различаемых колебаний от 20 до 20 ООО Гц (сильно зависит от индивидуума, его пола, возраста), разрешающая способность по частоте и уровню сигнала 0,2 ... 5%, разрешающая способность по углу (без поворота головы на источник звука) 15 ,. 20° и 3 ... ... 4° (при повороте), зависимость воспринимаемого уровня сигнала от частоты нелинейна (кривые равной громкости), порог слышимости зависит от уровня шума в помещении, модуляции сигнала и наличия мешающих сигналов, длительность звучания сигнала должна быть не менее 0,5 с. Осязательный (тактильный) анализатор позволяет определить характер поверхности предмета (гладкая, шероховатая, сухая, влажная).
|
||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


