
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Расчет вибропрочности конструкции 12.5. РАСЧЕТ СИСТЕМЫ АМОРТИЗАЦИИ НА ЛИНЕЙНЫЕ УСКОРЕНИЯ[ 8...т Исходные параметры для расчета следующие: G, с (/), t, К. При расчете допускают, что a{t) изменяется по прямоугольному закону, длительность УЛ Со = = const (рис. 12.1, д). Последовательно определяют величины 1шах. Расчет СА при линейной характеристике амортизаторов Максимальная деформация А: Imas = (2йо/ш!) sin зх (/ /Г), (12.16) где cof = Kj,/m, Т = 2зг/ш1. Максимальное ускорение d = = 2ао sin я (УГ). Коэффициент передачи ускорения К = <л/го=2 sin п (Ш). (12.17) При 4 < 0,17 Т из (12.17) получаем Кд < 1, т. е. СА защищаег РЭА от УЛ только при малой длительности УЛ. При /о > 0,17 Г 1 < < К.ЛН < 2, и максимальная деформация согласно (12.16) будет (Например, при = 19620 мм/с и cof = 4000 с-2 ах 2 X X 19620/4000=9,8 мм и а = = wfgmax = 39240 мм/с, т. е. Клн = 2.) Таким образом, при длительных УЛ СА не только не защищает РЭА, а даже усиливает действующие ускорений, так как gax достигает неконструктивных размеров и может служить причиной разрыва А. Защита от динамических ооздейстпчЯ Для уменьшения прогиба применяют упругие ограничители с нелинейной характеристикой. Расчет СА при нелинейной характеристике амортизаторов Максимальная деформация А: &max = (ai ?-Обл - где Cgj определяется по формуле (12.15), с-прогиб А до упора. Например, для данных примера 6 (§ 12.9), не налагая ограничений на длительность i, по формулам (12.16) и (12.17) находим ах = = - 0,85 см, Сбл = 3826 см/с2, Клн = 1,95. А с нелинейной характеристикой при действии длительных постоянных ускорений имеют меньшую деформацию (ограничивается ход), но при этом увеличиваются ускорения, действующие на РЭА, которые резко возрастают в момент удара аппаратуры об ограничители. 12.6. РАСЧЕТ СИСТЕМЫ АМОРТИЗАЦИИ ПРИ СЛУЧАЙНЫХ ВОЗДЕЙСТВИЯХ Г2, 8...11] Расчетная модель виброизолированного объекта представляет собой линейную колебательную систему с одной степенью свободы, имеющую затухание. Ниже рассмотрен расчет СА при вертикальных случайных колебаниях, однако все формулы и рекомендации могут быть применены и для расчета СА при колебаниях основания по горизонтальным направлениям. Случайные колебания основания характеризуются средним квад-ратическим перемещением fcg [мм], а также параметрами аир (с-Ч, которые входят в корреляционную функцию вида: /?(/)=&! e-alTl X (cosp/-f a/PsinP/), а<р. ются габариты. А с нелинейной характеристикой при действии тех же нагрузок имеют меньшие габариты, но эффективность виброизоляции с помощью таких А также понижается. Поэтому целесообразно выбирать А из условия защиты от наиболее опасных вибрационных или ударных нагрузок 12.6. Расчет системы амортизации При проектировании СА для защиты РЭА от случайных вибраций, помимо fcg, а и Р [с-Ц, необходимо знать параметры предельных вибраций РЭА по ТЗ. Уровень колебаний виброизолированного объекта задается в виде одного из следующих критериев: а§° -- предельное среднее квад-ратическое ускорение колебаний центра тяжести виброизолированной установки, v° - предельная средняя квадратическая скорость колебаний центра тяжести, - предельное среднее квадратическое перемещение центра тяжести. Расчетные значения критериев: fis V/Ие (u)/N (и), =&6 VMAu)/N(u), (12.18) (12.19) (12.20) где Q = V а + а многочлены Мс (и), /И (и), Mg (и) и N (и) в зависимости от особенностей конструкций СА записываются следующим образом: а) амортизаторы пружинные, резиновые и комбинированные без демпферов: Мс (ы) = ы*г + fu\ /И (и) = ur+fu (и) = 4/и л2 + (ы -f su) г + /ы, ; Л (и) = 4 mVs + 4 / (ыЗ -Ь u) г2 -i- + (1 + 2 ди + 1) п б) амортизаторы с демпферами вяз- кого трения: Мо (и) = 16/u=D + 4 (SM* -f и) -f . -f AfuD + MD -f I Л1 (Ы) = AuD3-{-ifu3D-\-uW+tu, j/Mg (Ы) = 4 MDS -f 4 / ( + )£> + 1+ (Ы* + su ) D + fu, fN (u) = 4 uDS + 4 ( 8 + + f + (ы* + 2qu2 + 1) D, Где - коэффициент ueynpyroro сопротивления, .r=l l-b4/vS, D - относительный коэффициент затухания, определяемый по фор-муле D=l/ l/l+4nV2 S S l/-/!+40/KJ , (J; - логарифмический декремент колебаний. 4/2; 2 9 = S - 2; На рис. 12.6 приведены оптимальные значения относительных коэффициентов затухания Dg , и - наименьшие значения перемещения (скорости, ускорения) виброизолированного объекта обеспечиваются при следующих соотношениях параметров: а/р / = a/Q 0.2 0,1 0,05 0,02 0,01 .0 70711 . 0,4472! .0,19612 . 0,09950 . 0,04994 .0,01999 .0,00999 Для предварительной оценки эффективности амортизации при случайных колебаниях основания можно пользоваться графиками рис. 12.6, на которых приведены коэффициенты динамичности (кривые 2, 3) по смещению к = /6 , (12.21) но скорости Кд1ш = о/о (12.22) и ускорению К° н=йо/&оЙ. (12.23) На рис. 12.6 даны две группы значений Кдиц: для А с демпферами вязкого трения (значения К , Кдни и К ц вычислены при Dg = = Dg , кривая 2) и для резиновых или комбинированных А с большим коэффициентом неупругого сопротивления (значения К , К н и К° вычислены при уь = 0,22, кривая 3). Им соотнесены значения Dg , кривая Виброизоляцню рассчитывают в следующем порядке. 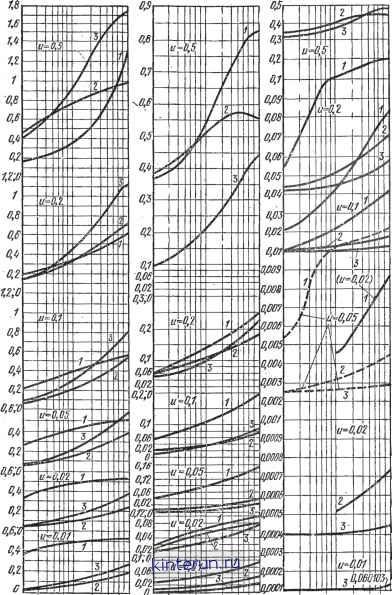 0,070,01 0,000,10,10,1/0.61 0,010,01 0,060,10,10,461 0,010,01 0,060.10,10,00.61 опт пОГТ Рис. 12.6. Оптимальные значения о1носительных коэффициентов затухания и £)ОПТ при значениях (кривые i), с коэффициентами Кдин при D-D (кривые 2) и при v=0,2Z (кривые 3), и=0,01 ... 0,5
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


