
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Расчет вибропрочности конструкции 12.3.РАСЧЕТ СОБСТВЕННЫХ ЧАСТОТ РЭА КА АМОРТИЗАТОРАХ I8...I11 Полностью симметричные системы амортизации Условия полной симметрии СА (рис. 12.3, а): а = 0; 26 = 0; 2с = 0. При этом Ri принимаются параллельными соответствующим осям координат, начало которых проходит через ЦТ, который лежит в. геометрическом центре блока, а главные оси инерции блока совпадают с осями координат. В этом случае все частоты \о находятся в узком диапазоне, что является преимуществом такой СА. Общее частотное уравнение распадается на шесть простых вида со - - Л/Кам/ = 0. из которого определяются частоты в продольном Voi, поперечном и вертикальном Vqj направлениях, продольной и поперечной Vqs качки, рыскания Vgel Уо, = У0,025Кж/,7г; Vos=V0,025Kj,/,-n! v 3=V0,025K,/m: Vo5=V0,025K2B2/yy; Vo6 = Vo, 025 (Кж2Л2 -j- KylB) /J, (12.11) в которых J, к, 2Л и равны: £,=0,083т(Л2-[-Б2)з /, = 0,083,n(B2-fC2); Kf = 4Kj; которые должны удовлетворять уравнениям: 2А?гзс = 9,81т.; Rij,=9.81m ; N N 2/?гг = 9,81ш,; XiRixyi-N S(Rai-/?i=cZi) = 0, (12 11) где rui - компоненты массы по осям X, Y к Z, а Xi,-yi V Zi - координаты точки крепления к блоку t-ro А. Практическое значение .леют только статически неопределимые СА, при отыскании Ri в которых накладываются ЗЛ/-6 дополнительных условий. При наличии в СА плоскостей симметрии дополнительными условиями будет равенство Ri симметрично расположенных А. Действие одной возмущающей силы F = sin 2 nvt, приложенной к точке блока с координатами Хр, ур, zp. заменяется системой трех сил Рйху Fey. pQz, приложенных к ЦТ блока, и трех моментов М. Му, Mq: f ох = f о cos а; Fy = F cos Р; Рог=f cos у; Мох = РогУр~Рр,/Zp, Моу = FoxZp-- -FazXf; Moz = FoyXp-РйхУр. При этом амплитуды вибраций ЦТ блока (мм) и число вращательных колебаний будут: lcx25Fux/mvl, loy~2SFoy/m\l; t,oz25F/mvl; Фок = Лок/жЮ§; ffQyMoy/jQy&l; (poz=Mo2/./ozO>o> a рекомендуемое значение К,, > 4. Чтобы избежать высокочастотных собственных вращательных колебаний блока (при больших расстояниях от А до ЦТ блока), следует соблюдать условия (камёД?)/К, £=Уог,/т: Определив величину статических деформаций А (xj стц = RijKabix и т. д.), проводят выравнивание их по трем осям, используя прокладки или смещение оси А в плоскости крепления Для облегчения условий работы СА следует уменьшать расстояние между ЦЖ и ЦТ блока и использовать симметричное расположение А. Для ряда характерных схем пространственного нагружения в табл. 12.2 приведены расчетные формулы (см. также § 12 9, пример 5). -12.8. Расчет собственных частот РЭА на амортизаторах У owfimt/aamo/} 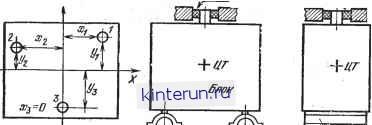 б амортазсгшу © 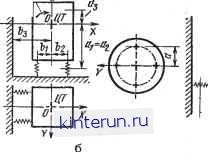 4Г7- ® Рис. 12.2. Статически определимая однонаправленная схема СА с тремя опорными А (а) с двумя опорными и одним кольцевым А (б) Рис. 12.3. Схемы СА с двумя (а. в) и одной (б) плоскостями симметрии Рис. 12.4. Система амортизации с наклонным расположением амортизаторов (а), разме-- Ры резиновых втулок (б), СА с боковым расположением амортизаторов (в) ± У(сй2 о))2+4КеКЛ где й), = Кэ£/т; {02=Kj,/m; 0)3=(Kj, + К 2В2) ; О), = К,/т; a), = (K,2B2 + Kj,2C2) ,; c0e=(Kx2C2 + K,22)/yj,; Ка = Ку2Л/,-п; Кь = Kj,2H/y; (12.13) Ке = Кг2у4/т; К/ = Кг2А у. Для выполнения условий симметричности относительно двух вертикальных плоскостей необходимо обеспечить равномерность весовой нагрузки элементов по горизонтальной плоскости блока (см. § 12.9, пример 6). Системы амортизации с одной плоскостью симметрии Плоскость симметрии XOZ и оси X, Y, Z являются главными центральными осями инерции СА (рис. 12.3, б). Симметричные формы колебаний состоят из двух поступательных перемещений по осям А и Z и одного вращения вокруг оси. Несимметричные формы колебаний состоят из поступательного перемещения по оси У и двух вращений вокруг осей X иУ. 12. Защита от динамических воздействии Три собственные частоты при симметричных формах равны: cof.B.s = i/1,2,3 - 0,33 В/А-t/i = - 2 г cos 0,33 ф; =- 2 г cos (60°-0,33 ф); i Уз = 2 г cos (60°+0,33 <р); cos <р = = q/r; г = ± Vrn; Р = 0,33 с/А - 0,11 В/А; q = = 0,037 В/А - 0,166 ВС/А -f -i- 0,5 DIA Знак г должен совпадать со знаком q. - PiiP!,b( ii + a33K С = аъь Рп ( 33 Л- a,i) -f Мц <Ч-л ъъ- -Pii(a?..+ab); D = 033 а?б+ ,1 а§в- .. зьбб! а11 = 2Кж; а2 = 2К(/; 33= К; ai.=, = 2Kz; as6= -2Кз,{2; a44 = 2(K,t/= + K zn; а,5=2(К:,г2+К, . 2); о.. ===гУ.гУ\ ai6 = -2Ki/; aj,==-2Ky2; ot26 = 2Kj,x; 36 = -2КгЛ. 45= - - г/; 40= -2Ку /; 5ji = G/g; Р44=ос; Pb6=s,; Рбо=; Рбе = --г/г; Р4Ь=---т!/; Pje = -зсг; Kjc, Ку, Кг - коэффициенты жесткости амортизаторов, X, -уу Z1 J ху XZ1 Jyz-моменты инерции и центробежные моменты инерции блока относительно осей X, Y, Z, проходящих через его ЦТ. Три другие собственные частоты равны: --У4.6.6-o,33VA;- {/,= -2/-, cos0,33fpi; г/, = 2г,со5(60°-0,5ф1); Уъ=2г1 cos(60°-);-0,33fpi); cosфl = gl/fr. П= ± V\K\< Системы амортизации, симметричные относительно двух вертикальных плоскостей Определяющее условие (рис. 12.3, о): Q О, 26 = 0, 2с = 0. Условие симметрии 2Кас; = 0; 2КггСг=0; 2Kiyfci=0; SKiyfei=0. В этом случае coj = 2л\1 и частоты независимых вертикальных и связных продольных колебаний и продольной качки равны: co2 = e)f; со2 = 0,5{(соЦ-со) ± ± 1/(0. - со)2 + 4К Кь }, (12.12) а независимых колебаний рыскания и связных поперечных колебаний а боковой качки: 0)2 = 0)2; 0)2 = 0,5 {((Of-fco=)±
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


