
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода разомкнутой системы имеет внд; ЛАЧХ и ФЧХ записываются как Цк (Q) L , (Q) - [Lo (й) + Lk, р (Q)]; век (Q) вне (Q) - [во (Q) + вк. пр т- В этом случае проводится выбор параллельного корректирующего устройства. Порядок синтеза принимается следующий. 1. Приведение структурной схемы системы к системе с единичной обратной связью и размыкание системы производятся, как и при последовательной коррекции. 2. Построение ЛАЧХ нескорректированной разомкнутой системы производится по параметрам звеньев, входящих в систему, Tiix же, как и прн последовательной коррекции (рнс. 9. И). 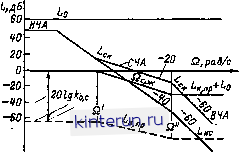 Рис. 9.11. Логарифыические амплитудно-частотные характеристики электропривода с параллель-нов коррекцией. 3. Построение ЛАЧХ скорректированной (желаемой) разомкнутой системы Lck (й) производится по рекомендациям, приведенным при синтезе последовательной коррекции. 4. Определение суммарной логарифмической характеристики охваченного звена и параллельной коррекции и пр (й) + Lo (й) = (Q) - (Q). 5. Выбор участка системы илн звеиа, которое охватывается параллельной коррекцией. Это решается с учетом требований к системе и возможностей технической реализации корректирующего устройства. После выбора участка охвата строится ЛАЧХ этого участка Lq (Q)- 6. Определение логарифмической характеристики параллельного корректирующего устройства н его построение путем графического вычитания и. пр (q) = [Lk, пр (q) + Lo (q) ] - Lo (q). 7. Выбор схемы и расчет параметров параллельного корректирующего устройства по виду его логарифмической амплитудно-частотной характернстикн 1к,пр () [9.1]- Синтез последовательиых и параллельных корректирующих уетройстн с помощью обратных ЛАЧХ. Использование обратных ЛАЧХ позволяет проще и нагляднее проводить синтез систем электроприводов с последовательными и параллельными корректирующими устройствами и особенно многоконтурных систем с параллельными обратными связями, охватывающими одну и ту же последовательность звеньев. Такая структура Рис. 9.12. Структуриая схема следящего электропривода с последовательным и параллельным корректирующими устройствами. широко применяется в следящих электроприводах, и поэтому синтез корректирующих устройств с помощью обратных ЛАЧХ и получил в них наибольшее распространенне [9.4]. Сущность метода заключается в следующем. Структурная схема синтезируемой системы в общем виде может быть сведена к схеме двухконтурной системы, приведенной на рис. 9.12 с двумя отрицательными обратными связями: главной (ГОС) и местной (МОС). Схема содержит неизменяемую часть системы с передаточиой функцией Wh,4 (р) и Последовательное и параллельное коррек тирующие устройства с передаточными функ пнями соответственно Ик-пс (Р) н к.пр (р) Передаточная функция разомкнутой си стемы по цепи ГОС имеет следующий внд: И(р)=Ик,пс(рЬ l + WH,4(P)WK,np (Р)* в следящих электроприводах в качестве последовательного корректирующего устройства применяются устройства, обеспечивающие первую илн, реже, вторую производную от ошибки. Практически почти всегда достаточно вводить только первую производную. /1№фференцирование ошибки осушест-влнют ди(]ренциаторы (см. разд. 10) или дифференцирующий контур с ЛС-цепочкой (см. разд. 3), передаточная функция которого равна *д, к7д,кР+1 где *д,к. 7д, к - коэффициент передачи и постоянная времени дифференцирующего контура. В некоторых следящих электроприводах не требуется введения последовательного корректирующего устройства. Тогда пере-даточиаяфункция разомкнутой системы равна: >°i-fiH.!(p)i?Lp(P)- Ей соответствует обратная передаточная функция разомкнутой системы Wipr (p) = W-J ,(Р)-]-W. p(p). (9.17) Анализ и синтез автоматизированного злектропризода [Разд. 9 где W- \ (р) - обратная передаточная функция неизменяемой части системы. Значения слагаемых W-\ (р)и WK,np (Р) просто оцениваются по их логарифмическим частотным характеристикам L~,(Q) и Lg р (Р), построенным на рис. 9.13 штриховой и штрихпунктирной линиями. В диапа-3QHe инзких Q < О} и высоких Q > частот L- \ (Q) > f- т> () диапазоне частот Qi < Q < Q/ (Q) < (Q). Поэтому в каадстве обратной ЛАЧХ системы принимается изображенная иа рис. 9.13 сплошной линией. В соответствии с этим   / 10 а,рад/Ь Рас. 9.13. Обратные логарногаческне анплвтуд-но-частоуные характернстикн разомкнутой системы электропривода с параллелЬЯЫк корректирующим устройством. НОЙ асимптоте (ВЧА) выбрать амплитудно-фазовую характеристику (АФХ) 1к,пс №) и к. пс (р) и Ш) СЧА - выбрать W (/р) и 1к,пр (Р). а по ним определить вид и параметры корректирующего устройства. При синтезе прежде всего следует убедиться в устойчивости внутреннего замкнутого коитура с местной обратной связью. №)Жно синтезировать внешний контур с ГОС и при неустойчивом внутреннем, но это может  Рнс 9.14. Обратные логарифмические амплитуд-во-частотяые характериствкд разомкнутой системы электропривода с последовательным и параллельным корректирующими устройствами. обратная передаточная функция разомкнутой системы принимается равной: 1Г-1(р) = 1-%(р) при Q<Qi и Q>Qg; W-i(p)= lK,np(P) при Qi<Q<02. В простоте построения L~i (Q) системы и оценки ее передаточной фуикции заключается простота исследования системы с помощью обратных ЛАЧХ. Построение (прямой) ЛАЧХ системы L (Q) с параллельным корректирующим устройством производится слояшее [9.4]. При наличии последовательного корректирующего устройства обратная передаточная функхши рассматриваемой системы равна: W-i(p) = Wn\ iP) , WK.np(P) К,пе (Р) lk.neOf) Логарифмические характеристики слагаемых /С-тЧ ) и Lg Ю), соответствующие АФХ Ян.ч (W (/QVW ,(/Q), приведены на рис. 9.14. Обратная ЛАЧХ системы L~i (Й), соответствующая ее обратной АФХ (/Q), принимается по участкам в зависимости от значений частоты. При Q<QiHQ>Qg - Lr (Q). прн < Q < <£S-L,(Q). При пранильно выбранных параметрах последовательного и параллельного корректирующих устройств эта суммарная характеристика являетси обратной желаемой ЛАЧХ i(Q). Тогда, зная £,- (Q), можно по низкочастотной асимптоте (НЧА) и высокочасгот- (9.18) выдать автоколебания [9.4]. Поэтому внутренний контур выполняют устойчивым с запасом устойчивости, равным при частоте Q = Q, г Wk. пр(/0) ШчУОЛ а при частоте Q - Qg Wh!,(/Q) WK, cyQ)J Дф2 = я;- .ncWQ) >K,nc(/Q) Обычно для следящих электроприводов запас устойчивости по фазе принимают равным ие ниже 30°. Практически запас устойчивости по фазе проверяют только при частоте Qg, так как при частоте Qi он имеет достаточное зн ачеш. Запас устойчивости системы проверяк при частоте среза Qc по значению Дф==я;-агй1-1(/0)1о о. Вычисление значений аргументов удобно производить по шаблонам (9.4]. В результате синтеза по обратным передаточным функциям неизменяемой части системы и желаемой скорректированной разомкнутой системы определяется прямая передаточная функция параллельного корректирующего устройства. Это делает такой синтез очень наглядным. Синтез следящих электроприводов с помощью обратных ЛАЧХ рекомендуется проводить на обычной миллиметроиой бумаге к. П1 с масштабом по оси частот, равным 50 мм иа одну декаду, а по оси логарифма амплитуды - 25 мм на декаду (20 дБ). Порядок проведения свнтеза с помощью обратных логарифмических хараетеристик следующий. 1. Система электропривода размыкается по цепи единичной ГОС (см. рис. 9.12). 2. Синтез проводится согласно уравнениям: а) при наличии последовательного корректирующего устройства к,пс(Р) Wip), (9.20) .iP) где (р) - обратная передаточная функция желаемой (скорректированной) разомкнутой системы; б) при отсутствии последовательного корректирующего устройства ;N(P) + B7.. p(P)= B7i. (9.21) 3. Выбирается последовательное корректирующее устройство в виде дифференциатора или дифференцирующего контура, обеспечивающих первую производную ошибки. Для упрощения реализации параллельного корректирующего устройства можно принимать зиачеиия Лд.кТд, к ij и 7, = 7 = 1/0, [9.4]. 4. Определяется АФХ согласно первому слагаемому уравнения (9.20) IF , (/Q)/ 7 TF (jQ) и строится обратная ЛАЧХЬр (Q), соответствующая этой АФХ (штрихован линия на рис. 9.14). Практически при неизвестных параметрах последовательного корректирующего устройства можно построить обратную ЛАЧХ, соответствующую АФХ неизменяемой части системы ж-, (уй). Это возможно, потому ото корректирующее устройство в следящем электроприводе изменяет только ВЧА, а это , можно учесть впоследствии. 5. Строится обратная желаемая ЛАЧХ скорректированной разомкнутой системы (Q) (сплошная линия на рис. 9.14) со- ¥ласио рекомендациям,приведенным при синтезе последовательной коррекции с помощью прямых ЛАЧХ н [9.4]. При этом за НЧА и ВЧА обратной желаемой ЛАЧХ принимаются участки ЛАЧХ первого слагадаого L71 (Q) (штриховые линии НЧА в ВЧА иа рис. 9.14). При неизвестных параметрах последовательного корректирующего устройства или при его отсутствии НЧА и ВЧА (Q) принимаются по (Q) (см. рис. 9.13). 6. Находитси ЛАЧХ второго слагаемого уравиеиия Ц (Q), соответствующая его АФХ к.ПР (/0)/ 7к,пс (/О)- За Ц (Q) нри-ннмается участок обратной желаемой ЛАЧХ ж (Q) в даапазоне частот Qj < Q < Q, (штрихпунктирная линия на рнс. 9.14, продолженная неограниченно влево и вправо при частотах Q < Qi и Q > О,). Тогда 7. Проверяется запас устойчивости по фазе внутреннего замкнутого контура Aqp, при частоте Qj. При достаточном запасе устойчивости Дф 30° находится передаточная функция параллельного корректирующего устройства по которой определяются вид и параметры параллельного корректирующего устройства. При недостаточном запасе по фазе внутреннего контура следует справа или слева от частоты Qg изменить наклон характеристики Lj (Q), соответствующей второму слагаемому, изменением желаемой характеристики или последовательного корректирующего устройства. При этом изменяются передаточная функция 1Рк,пр (Р). вид и параметры параллельного корректирующего устройства. 9.2.3. Методы анализа систем автоматизированного электропривода Линейные методы В линейных системах электропривода переходные процессы описываются неоднородным дифференциальным уравнением с постоянными коэффициентами вида dX , йЧ + ... (9.22) где д; - переменная, изменения которой во времени следует найти; п - порядок дифференциального уравнения; Оц,..., Оо - постоянные коэффициенты; X - правая часть. Из линейных методов решения даффе-ренциальиых уравнений получили распространение классический, операторный и частотный. Классический 1метод исходит из того, что вид решения неоднородного дифференциального уравиеиия известен и зависит от корней характеристического уравнения. Решение характеристического уравнения, записанного в алгебраической форме по однородному дифференциальному уравнению о Р -I-a; lPrl-I-...-I-OiP+Оо = 0. и нахождение его корней pi, р Pn-i Ря производятси различными методами [9.5, 9.6 и др.]. / В зависимости от вида корней характеристического уравнения решения неоднородного дифференциального уравиеиия могут быть следующими. а) Все корни действительные и разные - решение имеет вид х (О = A+Aie- /It*- * + ... ... + А-п*..
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


