
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Анализ tt синтез автоматизированного влектропривода [Разд. 9
Если быстродействие недостаточно, то необходимо уменьшить 1Е09ффициент полинома при р . Этого можно добиться введением жесткой отрицательной обратной свизи по 1+aiP+a.2P+ +anP Рис. 9.6. Структуриаи схема системы электропривода с жесткой отрицательной обратвой овизью по выхсщиому снгаалу. выходной координате, как показано на рис. 9.6. Передаточная функция такой замкнутой системы имеет вид: Wa(P) = = a pn-f ...-ba +aiP-f 0+**о,е) Iff к в! 1+*Ао,с Соответствукицим выбором значении ка, с можно получить требуемое значение а. Желаемую передаточную функцию Wip), коэффициенты полинома которой берутся из соответствующей таблицы, удобно преобразовать к виду где fli = &10ПТ в ж= опт < п-1ж~п-1опт Здесь значение такое же, как в (9.7), или прн введении корректирующей жесткой обратной связи совпадает с а Ъ (9.7). Используя корректирующие обратные связи можно добиться того, чтобы передаточ- ная фуикции скорректированной САУ совпадала с W (р). На рис. 9.7 представлена САУ с п - 1 корректирующими связями по первой, второй, .... (п-1)-й производным выходного 7+а,р+агрг+...+аяр Хвых сгр Рнс. 9.7. Структурная схема системы электропривода с гибкими отрицательными обратными свй- эямв по первой, второй.....(п-1)-й провзводнымн выходного сигнала. сигнала. Передаточная функция такой скорректированной САУ к(Р) = + {th + kc f + ifh + kc р+\ (9.9) Условии совпадения передаточных функций lcK (Р) и Г (р): =а1ж; = а*ж; Отсюда определяются коэффициенты корректирующих обратных свнзей: ci=(ai -оО/А; С2 = (а2ж-а,)/*; Если значения коэффициентов обратных связей получаются отрицательными, то это значит, что соответствующая обратная связь должна вводиться как положительная. Синтез систем автоматизированного электропривода с потщью логарифмичесиО( анплитудно-частстиых характеристик (Л ач? проводится на основании сравнения логарифмических амплитудных и фазовыхХарактеристик разомкнутых нескорректированжи скорректированной систем электропривода. Амплитудиаи и фазоваи частотные характеристики получаются из амплитудно-фазовой характеристики (АФХ) W(/Q) = (Q)e/e<\ где А (Q) - амплитудно-частотная характеристика (АЧХ); 6 (Q) - фааочастотиая ха-рактюистика (фЧХ); Q - круговаи частота. Логарифмические амплитудные н фазовые частотные характеристики получаются §9.2] \ . .. --l;>v- ктрврывного действия  при логарифмировании АФХ 1п[1 (/Q)1 = iAa (q) + /9(Q). Построение ЛЧХ в логарифмическом -маспгтабе позволяет получить амплитудную характеристику, состоящую из прямолинейных участков, что упрощает проводрмые вычисления и синтезирование. При построении логарифмической амплитудной характеристики пользуются не натуральными, а десятичными логарифмами. Логарифм амплитуды оценивается в децибелах. Под логарифмической амплитудно-частотной характеристикой (.JIA4X) понимается зависимость HQ)=2QlglA(Q)]. (9.10) где А (Q) - модуль АФХ звена или системы. Графически .ПАЧХ изображается зависимостью L (Q), построенной в логарифмическом масштабе частот Q. При введении последовательной коррекции передаточная функция разомкнутой скорректированной системы (см. рис. 9.2, а) равна: ск(р) = нс(р)к,пе(Р). (9.11) где (р) - передаточная функция разомкнутой нескорректированной системы; 1к,пс (Р) - передаточная функция последовательного корректирующего устройства. Тогда логарифмические амплитудные и фазовые характеристики скорректированной разомкнутой системы представляют простые алгебраические уравнения LcK(Q) = Lec(Q)--LH. c(Q): (9.12) вск(0)=ввс(0)+вЛЙ). (9.13) Этот метод наиболее распространен для синтеза скстем с последовательными корректирующими устройствами. При введении параллельной коррекции передаточная функция разомкнутой скорректированной системы (см. рис. 9.2, б) Wo (р) (Р) п7 fn)= ОУУ! И (9.14) где llo (р) - передаточная функция части .системы, охваченной параллельной корректирующей связью; Wn (р) - передаточная функция части системы, не охваченной корректирующей связью; Wt,ap (р) - переда-(СОчная функция параллельного корректирующего устройства. Как следует иэ (9.14), из-за наличия суммы в знаменателе логарифмические ам-плвтудио- и фазочастотные характеристики разомкнутой скорректированной системы не могут быть получены. Поэтому синтез параллельных корректирующих устройств проводится только в частных случаях, когда IWoOQ)wb.np (;Q)l<i ляегся по передаточной функции последовательного устройства согласно (9.11), найденного на основании синтеза. Синтез систт алектропривода с последовательной коррекцией с помощью ЛАЧХ выполняется в следующем порядке. 1. Прежде всего систему электропривода следует разомкнуть, для чего необходимо преобразовать структурную схему так, чтобы получить единичную обратную связь. Размыкание системы выполняется разрывом обратиой связи. В следящих системах электропривода основная обратная связь по выходному углу единичная. Поэтому нет необходимости в преобразовании структуры следящих систем. В системах стабилизации скорости или момента двигателя обратная связь обычно содержит коэффициент обратной связи, не равный единице. Тогда следует преобразовать структурную схему (рис. 9.8, о) и за выход-  Рис 9.8. Структурвая схема алектропривода ной сигнал разомкнутой системы принять сигнал обратной связи (рис. 9.8, б). 2. Построение ЛАЧХ нескорректировая-иой разомкнутой системы производится по участкам для динамических звеньев, из которых состоит система электропривода. Обычно производятся также расчет и построение 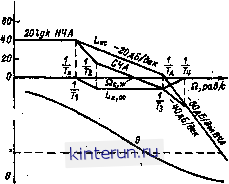 -до . . Чаще передаточная фуикцкя параллельного корректирующего устройства опреде- Рве 9.9. Логарифмические амплвтудво-чаетот-ные характервстикв электропрввсяа с последовательной коррекцией. ФЧХ для определения запаса устойчивости по фазе. Для иллюстрации на рис. 9.9 приведены ЛАЧХ L (Q) и ФЧХ е ) разомгау-той системы стабилизации скорости ДПТ с инерционным преобразователем, постоянная времени которого Т, и двигателем, являю-щимся колебательным звеиш {T,=вYTJ\), имекндей общий коэффициент усиления k = *ГЙстроенйе ЛАЧХ скорректированной (желаемой) системы. Эта ЛАЧХ состсжт из Анализ и синтез автоматизированного алектропривода [Разд. 9 трех асимптот - низкочастотной НЧА, сред-нечастотной СЧА и высокочастотной ВЧА и двух участков, сопрягающих среднеча-стотную асимптоту с низко- н высокочастотными (рис. 9.9). Порядок построения Lck (ю) принимается следующий: а) Определяется частота среза Q желаемой ЛАЧХ. Частота среза определиется по заданному качеству переходного процесса, т. е. по времени переходного процесса / и перерегулированию о (см. рис. 9.3), и оценивается приближенно по уравнению где ft - коэффициент, зависящий от перерегулирования и определяемый по графику рис. 9.10, а. б) Строится среднечастотная асимптота (СЧА). Учитывай, что СЧА определяет качество переходного процесса системы и запас ее устойчивости по амплитуде и фазе, построение ее осуществлиют в соответствии с рекомендациимн [9.1], обеспечивающими требуемое качество процесса. Проходит СЧА 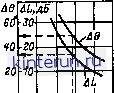 10 20 30 W g) втах,А Рис. 9.10. Номограммы для определения чаетоты среза (а) и частоты сопряжения (б). через Юс, ж с наклоном 20 дБ/дек, что обеспечивает достаточный запас устойчивости по фазе в диапазоне частот обычно не менее одной декады. Это дает достаточный запас устойчивости по модулю. При построения СЧА может быть учтен требуемый запас устойчивости по модулю, который определяет частоту сопряжения СЧА с отрезком, сопряженным с низкочастотной асимптотой (НЧА). Значение требуемого запаса устойчивости по модулю и фазе иаходитси по графику рнс. 9.10, б в зависимости от заданного перерегулирования о. в) Строятся иизко- и высокочастотные асимптоты (НЧА и ВЧА) так, чтобы они нлн одна из них (чаще НЧА) в возможно большем диапазоне частот совпадали с ЛАЧХ нескорректированной системы. Это упрощает схемы корректирующих устройств и их выбор. В рассматриваемых ЛАЧХ (см. рис. 9.9) принято, что НЧА и ВЧА совпадают с ЛДЧ А нескорректированной системы. При этом общий коэффициент усиления системы остается неизменным. г) СЧА сопрягается с НЧА и ВЧА. Сопряжение производится прямыми с наклонами -20, -40 и -60 дБ/дек. Желательно, чтобы этот наклон отличался от наклона ЛАЧХ нескорректированной системы в том же диапазоне частот не более чем на 20 дБ/дек. Желательно также, чтобы сопряжение производилось в точках сопряжения участков ЛАЧХ нескорректированной системы. Все это ведет к простым корректирующим звеньям, что и является основным признаком при выборе НЧА, ВЧА и отрезков, сопрягающих их с СЧА. На рис. 9.9 наклон сопрягающих отрезков принят равным -40 дБ/дек н сопряжение произведено прн частотах сопряжения Qi= 1/Г и 0,= l/r,. 4. Построение ЛАЧХ последовательного корректирующего устройства производится в соответствии с (9.12) по уравнению к,пс(<В) = скИ-ис(< )- По построенной ЛАЧХ определяются звенья, из которых она может быть получена, и нх параметры. Практически это делается по справочной таблице [9.1], где приведены ЛАЧХ типовых корректирующих устройств, их принципиальные электрические схемы И зависимости, позволяющие определить параметры. Полученная на рис. 9.10 ЛАЧХ соответствует интегродифференцнрующему контуру с передаточной функцией ш ЛТ*Р + 1)(Т,Р+1) --(P)(T,p + i)(T + l)- 5. Если при выполнении последовательного корректирующего устройства возникают трудности, то оно может быть заменено параллельным устройством. Это делаетси на основании их одинаковых действий и, следовательно, иа основании равенства их передаточных функций h.nc(W l+W (p)W,. p(p) откуда находится передаточная функция параллельного корректирующего устройства 1и.пр(Р) = (;;- ).(9.1б) где 10 (Р) - передаточная функция звена, охваченного параллельной корректирующей цепью. Синтез систш влектропривода с парал лельиой коррекцией с помощью ЛАЧХ воз<-можеи только при частных случаях согласно (9.14). В диапазоне частот, когда ) Wo (/О) Х-X и.пр I 1> АФХ скорректированной разомкнутой системы согласно (9.14) имеет вид: т wo 0q) Wh c/q) => w e т. ЛАЧХ и ФЧХ определяются как /cH(Q) Za.c(Q): вск(0) вис(0). Таким образом, в этом случае ЛДЧХ и ФЧХ скорректированной н нескорректированной разомкнутых систем одинаковы. В диапазоне частот, когда ) Wq (/Я) х Хк.пр (/О) 1> 1. АФХ скорректированной
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


