
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода примерно на 15-30°. В качестве реле KV используется реле напряжения типа РЭВ880 с гильзой для замедления спадания магнитного потока при спадании тока в катушке. Прн управлении с контролем тока используется узел схемы, приведенный на рис. 8.33, б. Реле пускового тока КА, включенное в цепь статора СД (непосредственно или 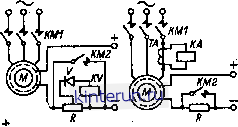 IJTAW КУ 9 J<M1 КА  к кмг кт р; кдг -y-J Рис. 8.33. Узлы схем управления сннхрониза-цнеВ СД прн пуске с контролем скорости (а) и тока (б). через трансформатор тока ТА), вначале пуска включается. В конце пуска, когда пусковой ток спадает до тока отпускания реле, оно отключается, включает реле времени /СГ, которое спустя выдержку времени включает контактор КМ2, полное напряжение возбуждения подается на ротор двигателя. Такое управление с контролем тока чаще используется при прямых пусках ОЦ и мощных питающих сетях. &в. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ВОЗБУЖДЕНИЯ СИНХРОННЫХ ДВИГАТЕЛЕЙ В производственных механизмах широкое распространение получили синхронные электроприводы средней и большой мощности. Синхронный двигатель может быть использован также и как генератор реактивной мощности в системе электроснабжения. Наличие всевозможных возмущающих воздействий приводит к отклонению параметров СД и питающей сети от нх номинальных значений. Это снижает техннко-экоиомиче-скиё показатели синхронных электроприводов и вызывает колебания напряжения и частоты питающей сети. Поэтому системы автоматического управления синхронными электроприводами долиты обеспечить, с одной стороны, устойчивую работу электропривода, с другой - стабилизацию параметров питающей сети снетемы-аЛектросиабжения. Кроме того, использование синхронных электроприводов для механизмов, работающих с резкопеременной нагрузкой, требует применения быстродействующей форсировки тока возбуждения СД, что улучшает технико-экономические показатели электроприводов, повышает устойчивость и перегрузочную способность двигателя и снижает его установленную мощность [8.19]. Все это определило использование в синхронных электроприводах быстродействующих возбудителей с автоматическим регулированием возбуждения АРВ в зависимости от требований электропривода и системы электроснабжения. Устройства АРВ обеспечивают различные законы регулирования параметров синхронного электропривода н питающей сети в установившихся и переходных режимах работы. АРВ СД в установившихся режимах обусловлено требованиями системы электро-снабжеиня, а именно ликвидацией колебаний напряжения сетн и потребностью реактивной мощности. Основными требованиями регулирования в этом случае является качество регулирования, т. е. точность стабилизации регулируемого параметра и надежность работы. АРВ в динамических режимах опре-делиет мгновенные значения регулируемых параметров в переходных процессах. Сюда относятся повышение динамической устойчивости электропривода и дшпфирование качаний ротора прн набросах и сбросах нагрузки в электроприводах, работающих с резкопеременной нагрузкой. Основным требованием к АРВ в этом случае является высокое быстродействие. Автоматическое регулирование возбуждения в установившихся режимах работы обеспечивается по одному из следующих законов [8.23]: постоянство cos ф двигателя (cos фд = const); постоянство реактивной мощности, вырабатываемой СД (Q = const); постоянство напряжения в узле нагрузки (в системе питания) (Ua = const); постоянство cos ф в узле нагрузки (в системе питания) (cos ф = const). При реализации требуемых законов управления некоторые регулируемые величины ве измеряются непосредственно, а используются косвенные параметры. Параметрами регулирования возбуждения СД являются: полный ток статора, активная реактивная составляющие тока статора, производное от тока статора, фаза тока статора (угол ф), напряжение на шинах питания СД, реактивная мощность даигателя, угол мощности даигателя (угол в) и его производаые [8.21]. Все перечисленные законы регулирования возбуждения могут Использоваться для электроприводов с различными видами нагрузки прн условии, если пики нагрузки не превышают максимального момента СД. При пиках моментов нагрузки, превышающих Мтах даигателя, используются первые даа закона управления. Закон регулирования cos фд == const целесообразен для электроприводов большой и средней мопшости с плавно изменяющейся нагрузкой при незна- 8.5] Типовые узлы схем синхронных мекгроприводов читальных колебаниях напряжения питающей сети. Чаще всего стабилизируется номинальное значение cos фд, иом- Закон регулирования cos фд = const обеспечивается при регулировании по углу мощности двигателя в и по активному и полному токам статора. Регулирование осуществляется при созфд< 1. В этом случае при регулярованни по углу 9 законом регулироваиия является значение ЭДС возбуждения двигателя {9) = f/n [cose+fe., tg (в-Ьф) sin 9]. где С/ц - напряжение питания; kx = xlxg (см. разд, 3). В частном случае прн регулиронанни возбуждения по закону cos ф = 1 == const обеспечивается отсутствие реактивной мощности (Q = 0) и минимум потерь энергии в двигателе. Тогда £в = /п (cose-b*;etg6sine). Законы £в = / (9) определены графиками 18.21]. При регулировании по активной составляющей и полному току статора законами регулирования являются приближенные, но достаточно точные зависимости 18.21] ЭДС возбуждения (при cos ф < 1): по активному току Дв=/(/a)=*rfX x/7fTT+T?2777t?+7i; по полному току £в=/ (Л К/ +2 в sin ф-Ь/S и при регулировании по закону cos ф = 1 (ф = 0. /а = /) при ХдфХф --ХаУТ+Ц при где /о - ток статора при холостом ходе двигателя. Закон регулирования cos ф = const нецелесообразен для электроприводов, работающих с ударной нагрузкой, так как при этом вместе с активной мощностью изменяется и реактивная, что может приводить к недопустимым колебаниям напряжения на шинах питающей подстанции. Закон регулирования Q = const используется для приводов средней и большой мопгаости с резкоперемениой и знакопеременной нагрузками. Этот закон обеспечивает минимальные колебания напряжения на шинах питающей подстанции, равные где AQ - приращение реактивной мощности двигатели при форсировке возбуждения; Сф, Qp - реактивные мощности при форсировке возбуждения двигателя и его номинальном, рабочем значении тока возбуждения; 5,3 - мощность короткого замыкания в узле нагрузки (на шинах питающей подстанции). Реализация закона Q = const одновременно обеспечивает максимум выработки двигателем реактивной мощности, ограничиваемой тепловым режимом. При недостатке реактивной мощности этот закон обеспечивает минимум потерь энергин. Автоматическое регулирование по закону иа постоянство реактивной мощности обеспечивается также по параметрам В, /а, / [8.21]. Законы регулироваиия имеют вид: при регулировании по углу в cose loq(Xd - Xq)(XKb: при регулировании по активному току £.=*лУ/ + (/р+/о) (при при регулиронаннн по полвсяиу току /*fe*-bVo?(l + fe*) + /e? E=Xq -, -а= Закон регулирования I/q = const используется, когда колебания напряжения превышают допустимые пределы. Он применяется дли приводов с крупными ОД с большим резервом мощности (cos ф = 0,7 0,8 опережающий), работающих при плавно измени-ющейся нагрузке. Стабилизация иаприжения сети дости-гаетси автоматическим регулированием потока реактивной мощности, вырабатываемой или потребляемой СЦ. Автоматическое регулирование возбуждения по закону = = const обеспечивается при регулировании по углу в, активному /а й полному / току статора. Регулирование по углу в применяется при постоянной нагрузке двигателя, когда а = а.ном - const. При этом актинная составляющая тока статора sine-f- ---)С08б \Хд Хл) 2 \хд Ха! sin9 = sin 29. Отсюда находится закон регулирования, определяющий Осноы - const: £в=/(в) = /а.я- Д sinB -l/o(ft,-l)COSe. Характеристика £в=/(в) при f/n = = const н /а = const является сложной нелинейной зависимостью {8.21]. Регулирование по активному току статора применяется только при переменной нагрузке СД в зависимости от ее характера. Поэтому закон регулирования f iU) определяется: а) при сравнительно небольших отклонениях нагрузки с условием, что в = бвом = = const, ХС08вао1 = 4/а -В; б) прв изменении нагрузки в широких пределах с условием, что Q = /р, где Лр,а и Вр,а - СМ. [8.211, или при kx = 1 где В, = /р + /о = const. При регулировании по полному току статора с дополнительным условием, что /р = const - закон регулирования: при Хд ф ха Ea=f(l)Xg /LLJ , где Al- (l+*) + --f=const; я ч Bl-- + = const; прн XgXa При законе Ua - const вводятся ограничения верхнего и нижнего значений тока возбуждения СД, что определяется соответственно пределом статической устойчивости СД (/в 2= /рянп) при заданной нагрузке и тепловым режимом двигателя (/в 1втах)- Закон регулирования (cos р = const) рекомендуется дли крупных синхронных электроприводов, работающих с равномерной илн плавно меняющейся нагрузкой и большим резервом мощности, в тех случаях, когда другие электроприемники подстанции работают с переменной нагрузкой, а колебания напряжения иа шинах не превышают допустимых пределов. Для повышения быстродействия системы автоматического регулятора возбуждения в динамических режимах в систему регулирования вводятся сигналы гибких связей, пропорциональные производной активной составляющей тока статора и квадрату активной составляющей (или полной) тока статора илн приращению внутреннего угла синхронного даигателя. Обычно регулирование возбуждения СД осуществляется по более сложным законам. включающим вместе указанные законы я сигналы гибких обратных связей [8.23]. Закон регулирования возбуждения на постоянство выработки реактивной мощности СД в электроприводах с резкопеременной нагрузкой осуществляется введением сигнала жесткой обратной отрицательной связи по току возбуждения, повышающей быстродействие системы, и введением сигнала по производной от активного тока, обеспечивающей демпфирование колебаний ротора: *в-{/во + *1 ( -p-/p.a) + *2 где {/во - напряжение возбуждения при холостом ходе СД; tp, ta - реактивная и ак-тнвнаи составляющие тока статора; /р,з - заданное .постоянное значение реактивного тока; - сигнал, пропорциональный производной от активного тока; tg - ток возбуждения; йа, кз - коэффициенты передачи звеньев системы регулирования. В более совершенных системах АРВ. в этот закон регулирования вводится еще сигнал, пропорциональный квадрату активного тока статора, обеспечивающий форсированное повышение тока возбуждения СД при набросах нагрузки: B = f/B0+fti(ip-/p,3) + + ktdijdt-k3{a + kiil Закон регулирования возбуждения на неизменность напряження на шинах питающей подстанции при спокойной нагрузке на валу СД имеет следуюпщй вид: *в = {/во-*(Ип-г/п,8), где п. п.з-текущее н заданное значения напряжения питания на шинах подстанции. Закон регулирования возбуждения, обеспечивающий поддержание заданных значений реактивной мощности и напряжения на шинах питающей подстанции при резкопеременной нагрузке, используется с введением дополнительных сигналов, пропорпио-вальных току ротора и производной н квадрату активной составляющей тока статора: Ив=t/во-*1 ( п - fn. ср)+ где {п.ср-напряжение сравнения, Йе-няющееся под действием реактивного, тока (мощности) СД, сравниваемого с заданным его значением, равное f/n.cp = f \ ( р-/р.з) А . Аналогично запвсываются законы регулирования других параметров. Электротехнической промышленнбЬтью выпускаются комплектные тнристорные возбудители с автоматическими регуляторами возбуждения серий ТЕ8-320 [8.25] и КТУ
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


