
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Ig. При изменении скольжения от s = Shom до s = 1 сопротивление Лвкв изменяется в 2-5 раз, причем большие изменения соответствуют большим мощностям привода. Поэтому при построении замкнутой системы ре- Рис. 8.28. Линеаризованная структуриая схема в системе асинхронно-вентильного каскада. гулирования используют линеаризованную структурную схему АвК. При этом нелинейностью зависимости момента от тока I4 пренебрегают, а К09ффиш1ент пропорциональности между током и моментом определяют 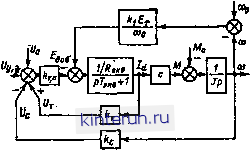 На рис. 8.28 показана линеаризованиая структурная схема асинхронного двигателя а системе асинхронного вентильного каскада, построенная по уравнению (8.56) с учетом значений с по (8.58) по (8.59). В замкнутых системах АВК стабилизация скорости обеспечивается тремя типами систем регулирования: системой с отрицательной обратной связью по скорости и положительной по выпрямленному току /д, системой с положительными связями по выпрямленным напряжениям и току 1 ротора, а также даухконтурной системой подчиненного регулирования с контурами выпрямленного тока и скорости. В системах АВК с отрицательной обратной связью по скорости и положительной по току la (рис. 8.29) для установившегося режима урааневия имеют вид (8.38): £дов п Vo ~ -Уу,а-Ас<Оо (1-S) (8.60) ftcxrS-£доб =/лЛакв. где Уо - напряжение управления инвертором, соответствующее максимальному напряжению инвертора при мннямальиой скорости электропривода. Из (8.60) определяются скольжение холостого хода % для заданного сигнала управления Uy 3 и электромеханическая характеристика (s): Рис. 8.29. Система регуляроваияя АВК с отрицательной связью по сиорости я положительной по току 1 по средней для данного привода нагрузке Ma =c/rf=-g-(£-V/< *р) и- (8.58) Зависимость R, от скольжения также не учитывается. При этом Rnao выбирается для среднего при заданием диапазоне регулирования скольжения Яакв=Л.кво = (2 ,+ЗХр/п) S + +2гг+га+гг. (8.59) ftci£r+*T,n*efflo (8.61) -fe <8.62) A (KB - т.пьг где /4i=l+*r,nMo/*ex£r- Из (8.62) и (8.57) определяется уравиеине механической характеристики где Л, = Л.КВ - *r,n*rMi - Здср (s - %)/я. В системе АВК с. положительными обратными связями по напряжению Ua и току 1а (рис. 8.30) значения , s, М определяются 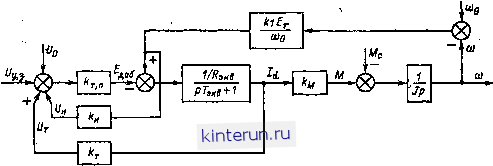 Рис. 8.30. Система регулировании АВК о положительивми связими во аыприиленяам напряжению в току Уд. по формулам: feT,n(C/o-t/y) klE (l - k.k)i Л, (8.65) где *в - коэффициент обратной связи по напряжению; RsKB-feT-n (fer-feHRa.fl) ЗХр 1 -Ih, п*н (S -So). вателя, системы импульсно-фазового управления и датчика тока. При синтезе систем регулирования каскадов следует учитывать их две особенности. Первая связана с тем, что вентильные каскады в своих основных схемах не имеют тормозных режимов при скольжениях от нуля до единицы. В этом случае в процессах регулирования, связанных с уменьшением скорости привода, система -регулирования будет функционировать только в том случае, если заданный темп снижения скорости меньше, чем при свободном выбеге привода: В указанном смысле вентильные каскады подобны приводам с ДПТ и с нереверсивным преобразователем. Вторая особенность принципиально отличает АВК от приводов с ДПТ в части возможностей систем регулирования. Энергети-
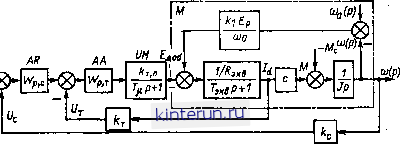 Рнс. 8.31. Структурная схема системы подчиненного регулирования вентильных каскадов по пепн 1, и - асинхронный двигатель; ЗИ - задатчик интенеивностн; L - фильтр; AR - регулятор ско- ростн: АА - регулятор тока. Рассмотренные системы позволяют получить характеристики со статическими и динамическими погрешностями при регулировании, не превышающими статические и динамические погрешности в электроприводах постоянного тока с аналогичными связями. АВК с подчиненным регулированием выпрямленного тока строится по аналогии с системами постоянного тока (рис. 8.31). Система регулирования - двухконтурная. Внешнему контуру регулирования скорости подчинен контур регулирования тока Ja-Передаточные функции регуляторов АА и AR а даукратноинтегрирующей системе и фильтра L иа входе определяются по формулам: .riP)=-fJ-ll-; (8.66) (ЗГцР+О/Ат р,с(Р)- 32рГ.., ( - w(py. (8.68) Компенсируемая постоянная времени Гокв учитывает индуктивность двигателя и индуктивность цепи выпрямленного тока. Некомпенсируемая малая постоянная времени Ту является суммой всех малых постоянных времени внутреннего коитура - преобразо- ческой базой систем подчиненного регулирования, обеспечивающих компенсацию больших постоянных времени, является наличие соответствующих запасов мощности регулирующего органа. Если объект регулирования имеет инерционность, то ее компенсация действием форсирующего звена может быть обеспечена в том случае, если предусмотрен соответствующий запас по уровню сигнала регулирующего параметра, например напряжения, подводимого к якорной цени даигателя постоянного тока. Поэтому номинальное напряжение выбирают несколько большим, чем ЭДС ДПТ. Ограничение регулирующего сигнала вследствие этого обычно не принимается во внимание. В вентильных каскадах ограничение регулируемого параметра является прийци-пиальным свойством системы. В этой системе форсирующее действие системы регулирования связано с уменьшением выходного сигнала £доб и предел изменения этого сигнала совершенно определенный - нуль. Изменение знака сигнала Ецоб ничего не дает для основных схем каскада ввиду закорачивания роторной цепи. Поэтому запас по уровню управляющего воздействии снижается по мере приближения скорости привода к номинальной. Указанная особенность должна быть принята во внимание при синтезе высокоточных систем автоматического регулирования АВК. 8.5. ТИПОВЫЕ УЗЛЫ СХЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПУСКОМ СИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ Пуск синхронных двигателей (СД) состоит из трех этапов; разбег двигателя до подсинхронной скорости, подача возбуждения в обмотку ротора; синхронизация с сетью. Разбег до подсинхронной скорости осуществляется с помощью пусковой короткозамкиутой обмотки, заложенной в ротор. В зависимости от мощности питающей сети, так же как в АД, применяются пуски при полном и пониженном напряжениях с использованием резисторов, реакторов и автотрансформаторов (см. рис. 8.3). При пуске СД высокого напряжения вместо контакторов, показанных на рис. 8.3, используются масляные выключатели. вала момента на половинной скорости из-за взаимодействия замкнутой обмотки ротора и поля статора и создания ею момента одноосного включения. При прямом пуске синхронизация с сетью происходит автоматически, после самовозбуждения возбудителя. Если при пуске время разбега СД превышает время самовозбуждения усилителя или момент статического сопротивления на валу превышает 40 % номинального момента СД, то применяют прямой пуск с разрядным резистором R в обмотке возбуждения ротора, как показано иа рис. 8.32, в, который отключают при разбеге СД до подсинхронной скорости. Разрядный резистор ограничивает ток возбуждения при пуске, улучшая этим механическую характеристику СД, и обеспечивает ускоренное гашение поля СД после его отключения от сети, что снижает аварийные разрушения обмотки при коротком замыкании. Выбор сопротивления разрядного ре- 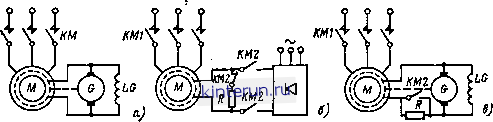 Рис. 8.32. Узлы силовых схем управлеиия пуском СД с глухоподключеииым возбудителем (а) и с разрядным резистором (в) и динамические характеристики (б, г). Подача напряжения возбуждення на обмотку ротора СД производится от возбудителя (генератора постоянного тока) G, расположенного на одном валу с синхронным двигателем (рис. 8.32, а) или полупроводникового выпрямителя (рис. 8.32, б). Синхронизация СД с сетью большей частью происходит автоматически при подсинхронной скорости и поданном возбуждении. В зависимости от момента подачи полного напряжения на обмотку статора СЦ в сочетании с подачей возбуждения в обмотку ротора существуют три вида пуска СЦ: прямой, тяжелый и легкий. При прямом пуске на обмотку статора подается полное напряжение сети, а цепь обмотки ротора подключается наглухо (без разрыва) к якорю возбудителя, как показано на рис. 8.32, а. Прямой пуск с глухоподключенным возбудителем возможен при наличии трех условий: если позволяет мощность питающей сети; если время разгона до подсинхронной скорости меньше времени самовозбуждения возбудителя, чтобы подача тока возбуждения в ротор происходила после достижения и подсинхронной скорости; если момент статического сопротивления на валу ие превышает 40 % номинального момента СД, что гарантирует разбег без застревания на половине синхронной скорости. Застревание СД иа половине синхронной скорости возможно из-за наличия в механической характеристике про- зистора R производится в зависимости от сопротивления обмотки ротора R: Л = (8-10)/?р[8.2. 8.3]. При пуске СД со снижением напряжения питания различают легкий и тяжелый пуски. При легком пуске напряжение возбуждения подается еще при пониженном напряжении питания. Легкий пуск применяется при малых статических моментах нагрузки, потому что обеспечивает малые моменты при вхождении в синхронизм. При тяжелом пуске напряжение возбуждения подается прн полном напряжении на обмотке статора. Пуск используется при больших моментах статического сопротивления, так как обеспечивает большие моменты при вхождении в синхронизм. Управление моментом подачи возбужде-.ния возможно прн контроле скорости или тока. При управлении с контролем скорости используется узел схемы, приведенный иа рис. 8.33, а. Реле KV подключено через диод V на часть сопротивления разрядного резистора. В момент пуска KV включается, а по мере разгона СД напряжение на катушке реле и его частота снижаются. При подсинхронной скорости реле KV отключится и включит контактор КМ2, который подает полное напряжение на обмотку возбуждения. Это происходит при правильном включении диода, когда ось северного полюса ротора опережает ось южного полюса поля статора
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


