
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода оптимум в двукратноинтегрирующей системе имеет внд: (8Гр+1) Jk Wp,c(P)=- 32T=ftcP (8.48) При настройке регуляторов токов и ско- горов рости в соответствии с (8.44), (8.48) полу- числяются сигналы положения вектора относительно фазы а ротора sin v, cos v (Y - угол между вектором и. и осью d, совпадающей с фазой а ротора). Частота сигналов sin v, cos v равна частоте скольжения: v = v - а, где v - угол между вектором Sj и неподвижной осью а об.моткн фазы А статора, причем cos у = 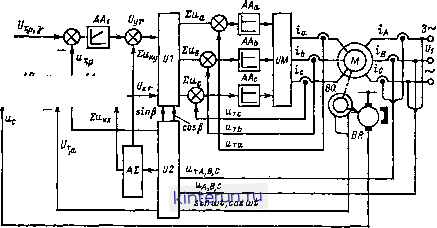 Рве. 8.25. Функцвональная схеиа свстены регулирования даигателя двойного пнтання с управлением активными и реактнанымн токами. АУ - задающее устройство; AR - регулятор скорости; А А - регулятор тока; j4S - блок ком-пёнснрующнх связей; UI, U2 - координатные преобразователи; АА, АА, АА - регуляторы фазных токов: UM - преобразователь частоты с непосредственной связью: BQ - датчик положения. чается астатическая система регулирования. Динамические погрешности по скорости при разгоне и торможеннн от задатчика интенсивности не превышают 3-5 % номинальной скорости, при изменении момента нагрузки ДМ = Л1ном динамическая погрешность не превышает 5 %. Функциональная схема системы регулирования приведена на рис. 8.25. Регулятор содержит два канала регулирования: скорости AR и реактивного тока статора AAI. Канал регулирования скорости содержит два контура регулирования - контур скорости и подчиненный ему контур активного тока статора. Канал регулирования реактивного тока статора одноконтурный. Выходные напряжения каналов регулирования поступают в координатный преобразователь, где из сигналов нулевой частоты пересчитываются в сигналы частоты скольжения. Система регулирования содержит также контуры регулирования фазных токов ротора (обратные связи по токам преобразователя частоты), необходимые для симметрирования и линеаризации преобразователя частоты. Регуляторы фазных токов - пропорциональные. Координатные преобразователи Ut, U2 предаазначены для преобразования сигналов управления. U1 преобразует их, иу из координат, связанных с и, в координаты а, Ь, с, связанные с обмоткой ротора. Для зтого в координатном преобразователе вы- = / 1 = / 1; sin v=(Uc - bW i = = Uflui, a - угол между осями фазы А статора и фазы а ротора; сигналы sin а, cos а снимаются с углоизмернтельной машины BQ и имеют частоту, пропорциональную частоте вращения. Пересчет сигналов управления из координатной системы X, у V. системе d, q производится по формулам прямых координатных преобразований: dr = rA:COSV Uqr = Urx sin V-f ttj, ttuCOSV. J Системы обратных связей по токам статора пересчитываются из координатных осей а, Р к системе х, у по формулам обратных координатных преобразований: isxisacosy+isfi sin у; в у. J (8.50) Чу = - ha sin V+f cos у. Система регулирования ДДП с управлением активным и реактивным токами построена при допущении неизменных напряжения сети и потокосцепления статора машины. При колебаниях питающего напряжения в опи; саниой системе могут иметь место некоторые колебания момеита, поэтому система может быть рекомендована для приводов, работающих при стабильной питающей сети. Разработана также упрощенная система регулирования, не содержащая внутреннего контура регулирования по активному току И блоков формирования сигналов компенсирующих связей. Система содержит регуляторы скорости AR и реактивной мощности, а также регуляторы фазных токов ротора АА, AAi А Ас. Выходные сигналы регуляторов скорости и реактивной мощности (в виде сигналов ну- бования к качеству регулирования, в том числе по отработке возмущающих воздействий, вызванных колебаниями напряжения питающей сети, применяются системы, включающие контур регулирования электромагнитного момента двигателя. Фуикщюиальная схема такой системы регулироваиия представлеиа иа рис. 8.26. В этой схеме объект ААа. АА Uyr 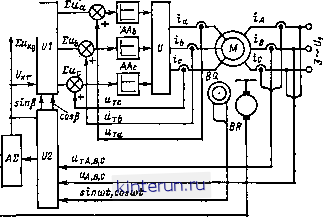 . От датчика, момента. Рис. 8.26. Функциональная схема системы ДДП с непосредственным управлением моментом. AJ - задающее устройство; AR - регулятор скорости; АА - регулятор тока; AM - регулятор момента; 4 2 - блок компенсирующих связей; BQ - датчик положения; У/, U2 - координатные преобразователи; Лj4, AAf АА - регуляторы фазных токов; U - преобразователь частоты с непосредственной связью. Левой частоты) при помощи сийус-косинусного решающего устройства U1 преобразуются в задающие сигналы регуляторов тока АА, AAj ААс, работающих на частоте скольжения. Используя систему, можно регулировать реактивную мощность и момент ДДП в установившемся режиме, не управляй им полиостью в динамике. Последнее обстоятель- регулирования - АД - представляется уравнением (,квжР+ОЛ< + Е кЛ., (8.51) вквЖ где fe., -эквивалентный ко- rsLr + r,Ls эффициент усиления при управлении момеи- AR ---АМ кт,л кзкв.М Рис. 8.27. Упрощенная структурная схема канала регулирования скорости при прямом управлении моментом. ство объясняется, во-первых, трудностями настройки электропривода иа технический оптимум (в частности, регуляторов тока иа частоте скольжения), во-вторых, нескомпеи-сированным влиянием фаз друг иа друга, B-tpeTbHx, нелинейностью зависимости момента двигателя от токов ротора. Система может быть рекомендована для энергоемких приводов, где не требуются высокие динамические показатели. Для регулируемых электроприводов, к которым предъявляются белее высокие гре- том; постоянная времени при управлении момеи- том; 2 ш-( *1+ я)РЛ. При условии вычисления и введения в управляющее напряжение сигнала Su объект представляется простым инерционным звеном. На рис. 8.27 приведена упрощенная структурная схема электропривода по каналу регулирования скорости. Передаточная функ- ция регулируемого объекта для контура момента равна: где fej - коэффициент обратной связи по моменту. Передаточная функция регулятора момента AM при настройке коитура на модульный оптимум имеет вид: Здесь Tpt - некомпенсируемая постоянная темени; также, как в (8.43), Гц == 10с. Передаточная функция регулятора скорости AR в двукратноинтегрирующей системе равна: -<Р=-Ч§грГ (8.54) Координатные преобразования в рассматриваемой системе не отличаются от преобразований в системе с регулированием активного и реактивного токов. Общие методы структурного построения систем регулирования электроприводов переменного тока, приведенные выше, могут быть применены и для асинхронных вентильных каскадов (АВК). Однако при учете огра-ничениых регулировочных свойств АВК системы их регулирования также будут обладать меньшими функциональными возмож-востями, чем система регулирования ДДП. Если в ДДП регулируемыми и независимыми параметрами являются и значение и фаза напряжения, подводимого со стороны ротора, то в АВК независимым параметром является только добавочное напряжение, в то время как его фаза детермнннроваиа. Добавочное напряжение £доб< введенное в вепь выпрямленного тока ротора, всегда находится в про-тивофазе либо в фазе с вектором тока ротора В результате этого независимое регулирование реактивной мощности и коэффициента мощности каскада становится невозможным, необходимость во втором каивле регулирования отпадает. Система регулирования строится одноканальиой - с каналом регулирования тока ротора f,. Уравнение роторной цепи АД для АВК может быть представлено в виде -Еяоб=Ггввв(ГгаввР + 1)(г+ег. (8.55) где £доб - вводимая в цепь ротора противо-ЭДС; Гг вкв-эквивалентное активное сопротивление роторной цепи, приведенное к обмотке ротора; Г;.вкв = Wtf - эквивалентная постоянная времени роторной цепи; Га и La- активное сопротивление и индуктив-вость цепи выпрямленного тока ротора; в,. - эквивалентная ЭДС, наведенная в обмотках ротора. При воздействии на Еоб и неизменном напряжении статора (илн медленном его изменении) основной магнитный поток АД почти не изменяется. Поэтому определяющее влияние на формирование электромагнитного момента АД оказывают токн ротора. Поскольку ток ротора с достаточной точностью отображается в реальных схемах каскада выпрямленным током 1а, то при регулировании скорости и момента основное влияние на момент оказывает переходный процесс в цепи выпрямленного тока, и на практике получила распространение структурная схема регулирования током 1а, аналогичная системам регулирования ДЩ1 с постоянным потоком возбуждения. При этом вводится непрерывная аппроксимация узла АД - выпрямитель, которая сводится к представлению его в виде гладкой составляющей выпрямленной ЭДС ротора Ear, определяемой Путем усреднения ее в интервалах дискретности выпрямителя 2л1тт и равной Ear = = kcErS, где Шо - синхронная угловая скорость даигателя; т - число фаз выпрямителя; = 1,35 - коэффициент схемы для трехфазного мостового выпрямителя: Е - действующее значение линейной ЭДС на кольцах неподаижного ротора; s - скольжение. После замены в уравнении (8.55) тока Ь на выпрямленный ток 1а и ЭДС на ЭДС выпрямленной цепи Ear получается уравнение, удобное для синтеза систем регулирования АВК: fecx£rS-£so6 = R>KB (Тар +1) la. (8.56) где эк. = а.д + <* = <2г5 + ЗЖр/я) S + + 2гг + га+ Гу - эквивалентное сопротивление цепи постоянного тока для трехфазной мостовой схемы выпрямителя; га - сопротивление выпрямленной цепи; Гэв = /-экв/вкв. - эквивалентная постоянная времени цепи выпрямленного тока; [L вкв= 2Lp + La+ L; Lp - приведенная к ротору индуктивность рассеяния обмоткн фазы двигателя; г L - соответственно активное сопротивление и индуктивность рассеяния трансформатора инвертора, приведенные к цепи выпрямленного . тока. Электромагнитный момент АВК в функции выпрямленного тока ротора 1а определяется по формуле (8.57) где Хр - иЬдуктивное сопротивление рассеяния АД, приведенное к обмотке ротора. Переход от уравнения роторной цепи (8.55) к уравнению цепи выпрямленного тока (8.56) и определение момеита по (8.57) означает, что при постоянном напряжении статора пренебрегают электромагнитными пе-реходаыми -Процессами в АВК, как более быстрыми по сравнению с процессами, связанными с индуктивностью выпрямленной цепи La- Формулы (8.56), (8.57) показывают, что система АВК как объект регулирования содержит две нелинейности, обусловленные, зависимостью сопротивления Raa от сюзльже-ния и нелинейной зависимостью момента от
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


