
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода т. 3 = а +И? (8.12) - сигнал задания модуля тока статора, формируемый функциональным преобразователем U1. Для рассматриваемой системы справедливы соотношения: 3 Lu. тиа где kf - коэффициент передачи датчика тока UA. 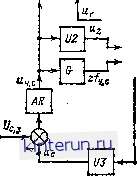
Рис. 8.20. Функциовальиая схема САУ с ориентацией по положению ротора. Из (8.13) И (8.14) следует, ЧТО в рассматриваемой системе так же, как в приводе постоянного тока, обеспечивается независимое регулирование потока и момеита, причем поток регулируется сигналом задания Urxa с тюстоянной времени Т, а момент - пропорционально сигналу итуа. Реальное запаздывание момента, равное 27 , определяется инерционностью контура регулирования тока. Регулирование скорости и потока обеспечивается внешними контурами. Синтез регуляторов скорости AR я потока АФ выполняется таким образом, что осуществляется компенсация механической постоянной времени привода Tf и электромагнитной постоянной времени ротора Г, соответственно по методике, принятой для электроприводов постоянного тока (см. разд. 7). САУ второго типа, в которой датчик потока отсутствует, а ориеи11фование. вектора тока осуществляется иа осяове информации, воступающей от датчика скорости, также может быть выполиеиа на базе автономного инвертора тока [8.14]. Ее функциональная схема показана иа рис. 8.20. Здесь виeцшнй контур регулирования скорости включает импульсный датчик скорости BR, частотно-аналоговый преобразователь U3 н регулятор скорости AR. Сигнал и с, снимаемый с выхода AR, подается через функциональный преобразователь U1 в контур регулирования в качестве сигнала задания ttr.g. Датчик ск(фости BR выдает грп импульсов иа каждый оборот вала, где г - конструктивная постоянная датчика, р - число пар полюсов в двигателе. Преобразовате.ть U3 осуществляет тфеобразование частоты импульсов в пропорциональный ей аналоговый сигнал и. Специфической особенностью рассматриваемой системы является наличие в ней разомкнутого контура регулирования частоты тока статора f, которая образуется как алгебраическая сумма частоты, пропорцнональ-ной частоте вращения ротора 7с. н заданной частоты скольжения [ч,с, снимаемой с выхода генератора частоты скольжения G. Операция суммирования частот производится системой управления инвертором Л {/цифровым способом, что обеспечивает требуемую точность задания частоты скольжения. Угол поворота результирующего вектора тока относительно неподвижнькх геометрических осей машины при пренебрежении высшими гармониками в кривой выходного тока инвертора определяется следующими составляющими: Фт=Фс+Фч.с+ф. где <Pc=J©d<-угол поворота вала; Фч.с= J о>гЛ= J--к с kgp - коэффициент передачи GF; а> - круговая частота, пропорциональная частоте GF, ф - дополнительный угол, вводимый в систему для коррекцин электромагнитных переходных процессов. Дифференциальные уравнения АД для системы без принудительного ориентирования вектора тока (<p = 0), записанные в ортогональной системе координат х, у. О, вращающейся в пространстве с угловой скоростью = о + <о имеют следующий вид (уравнения статора опущены): -=-T;-+rPry+fis. (8.15) ---------a>,Y ; (8.16) M=-Zp 4,yisl2. (8.17) Ирн = const, is = const, что имеет место в переходных режимах разюва и торможения. cosco,/- sin а>г< \ I t w 3 TM COS (art- sin (s>rt Наличие свободных составляющих потокосцеплений обусловливает колебания электромагнитного момента в переходных режимах. При этом частота колебаний равна заданной частоте скольжения ротора, а декремент затухания равен обратному значению электромагнитной постоянной нремеии ротора. Основные показателе качества переходного процесса в системе без принудительного ориентирования вектора ig определяются заданными значениями круговой частоты скольжения (О и электромагнитной постоянной времени ротора Г,. Кривая изменения электромагнитного момента для рассматриваемого случая построена иа рис. 8.21. Здесь 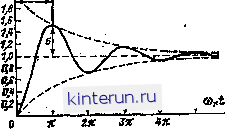 SIC Sit Рис. 8.21. Кривая измевення электропагнитного помента в СА У без принулительиого ориентирования тока относительно потока. время достижения первого максимума момента: <т =я/о>г; (8-20) относительное перерегуляронание: = ехр - ЫгТг (8.21) продолжительность переходного электромагнитного процесса: <п,п = (3-г-4)Г. (8.22) С увеличением круговой частоты скольжения а>, растет перерегуляронание и умеиь-щается время достижения первого максимума момента. Продолжительность переходаого процесса определяется лишь электромагнитной постоянной времени ротора. Увеличение постоянной времени ротора недет к росту перерегулирования и увеличению времени пеходного процесса. Постоянная нременя ротора занисит от типа АД и его мощности. Так как АД большей мощности имеют ббль-шне постоянные времени ротора, то у иих электромагнитные переходные процессы будут проявляться более существенно. В системах частотного управления, как правило, используются АДч: малым активным сопротивлением ротора, для которых максимальная частота скольжения весьма мала, а электромагнитная постоянная времени ротора составляет доли в даже единицы секунд. Это приводит к тому, что переходный процесс и системе без принудительного ориентирования имеет весьма неблагоприятный характер. ЛЬзмент нарастает медленно и.устаиавли-ваетоя с большим числом колебаний. Соответствующие колебания потока приводят к перерегулированиям в напряжениях иа АД и элементах UA, что вызывает необходимость увеличения установленной мощности преобразователя. Для того чтобы при скачкообразном кз-менении сигнала задания электромагнитный момент АД нарастал за минимальное время и имел максимально возможное значение при заданном ограничении иа ток статора, необходимо потокосцепленне ротора подджн-вать постоянным и иа оптимальном уровне, соответствующем максимальному моменту при заданном значении тока статора. Указанное услоиие выполняется при Ф=aгctg( o,T). При этом 0.23) (8.24) (8.25) т. е. при условии идеальности регулнтора тока момевт следует безынерционно за задающим сигналом (ич,е). который пропорцио-иален <л,. Практически реализация соотиопюння (8.23) обеспечивается функциональным преобразователем U1 (рис. 8.20). Выполнение условия (8.24) осуществляется с помощью IJ2 и фазосдвигающего устройства, входящего в состав системы управлеиия инвертором. Фазосдаигающее устройство осуществляет сдвиг импульсов управления инвертором иа угол ф, пропорциональный аиадого-ному сигналу, поступающему с выхода U2. .С целью упрощения VI и U2 нелинейные зависимости (8.23) и (8.24) аппроксимируются отрезками пряколх, как это показано иа рис. 8.22, а и б. , Переходя к синтезу регулятора тока, следует отметить, что если в приводе постоянного тока влиянием внутренней обратной связи по ЭДС ДПТ в большинстве случаев можно пренебречь, то в приводе перемеииого тока ее учет принципиально необходим [8.4]. Щ>и синтезе регулятсфа тока дифференциальные уравнения АД удобнее заинсать в (>тогональиой системе хооквват х, у, в, ось X которой ориентвровава по направлению результирующего вектора тока статора i. Эти уравнения имеют следующий внд: s + r I,- !i (8.26) .!У (a>,-a 4,j,-t- (8.27) ry , ,..... , , Чг!, - +(a..-a.)T,.-b-: Здесь У - суммарный приведенный момент ннерцни ротора и механизма; Мс - момент сопротивления нагрузки; - угловая частота тока статора. 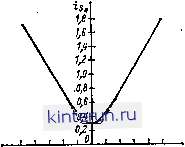 -11,05 -0,0S -0,01 0,01 OfiS 0,05  t т Г 1 17 1 I 1 1 I 0,05 -0,03 -0,01/. 0,01 0,0S 0,05 Рис. 8.22. Характеристики функциональных преобразователей UI (а) в U2 (б). Для звена постоинного тока справедливо: dia \ ная постоянная времени системы УВП - Д; 3 / L?, Ula + Yils-f - соответственно эквивалентные активное сопротивление и индуктивность цепн вы- i-r-i/ - a,tp 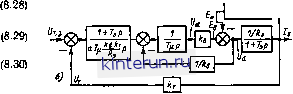 
1/ll> 1*Т,р Рнс. 8.23. Расчетные схемы контура регулирования тока. прямленного тока; г. La - активное сопротивление и индуктивность звена постоянного тока. Для трехфазного мостового инвертора тока справедливо соотношение la I 1 \ ви = - у *i 7 [ fry + jr; Prxj , (8. - в (8.31) 1.32) где kl = 2Кз/я - модуль коммутационной функции [8.5]. Дифференциальным уравнениям АД в где ia, и я - мгновенные значения огибаю- звена постоинного тока (8.26) - (8.32) соот-щихтока.ЭДСинвертора и ЭДС выпрямителя; ветствует структурная схема (рис. 8.23) кон-Та ~ lblR - эквивалентная электромагнит- тура регулирования тока. Объект регулиро-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


