
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Расчетные схемы механической части электропривода как н вьшутое , необходимо соблюдение следующих отиошеннй: при замене а-*-б J5 . тб жа %к+1 . ,6 го к-1.к . tlft- ори замене б- ft ft (2.1) (2.2) (2.2a) (2.3) (2.3a) (2.4) Зйрсь ef = 1/c, - податливость упругого звена. a соединенные последовательно упругие связи (ри 2.4, б) - суммой податливостей i=Vi,.+ ftb ii=- ftii+ ft ,m. (2-6) Если парциальное звено является краевым, то при преобразовании б - - а остается свободный упругий участрк, имеющий жесткость с, (соответственно податливость ei(ijj), который отбрасывают; при преобра-зовании а-*-б одна из масс щ>еобразоваивой системы сливается с заделкой и ее исключают из рассмотрения. Прв преобразовании звеньев тИпа а на практике часто имеют место случаи, когда жесткость одной нз упругих связей суще-сгаевно ббльше жесткости другой, яапрям) 1.1> . ft-hi и соответственно < <eft, ft+i да <2.;) н (2.2) следует}* ft-l- u -ft ft; -Ift 05 < 0,т.е.рассматриваемаяииерциоввость присоединяется к инерционности с той сторо- Ск-1,к Ск,кИ Ск-и Звено типа. 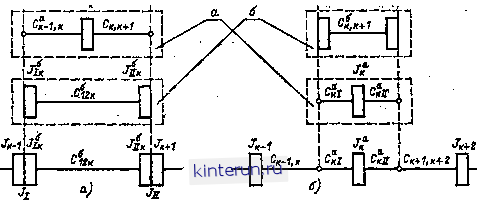 Ск+1,к-*-г V iAe а) Рис. 2.4. К вопросу закеяы типовых парциальных звеньев. Рис. 2.5. Расчетные враиательные схемы двухнассовов (в), трехмассовов (б) и оономассовов (в) систем. После преобразования схем с парциальными звеньями жестко связанные дискретны инерционности (рис. 2.4. а) характеризуются суммой моментов инерции или масс (2.5) ны, жесткость упругой связи которой велика. Как правило, для электроприводов вполне удовлетворительное представление о динв-ми<юских свойствах механической системы даетдвухмассовая система ис. 2.5, а); в ряде случаев при малых жесткостях упругих связей - трехмассовая система (рис. 2.5, б). ЛЛехаяика электропривода Во многих случаях жесткость упругих связей столь велика, что механическая часть системы может быть представлена в расчетной схеме только в виде дискретного инерционного элемента (без упругих связей), характеризующегося моментом инерции (рис. 2.5, в) 2 = -дв+2 или массой дв . пр. 2= дв+ 2 -пр?. в=1 (2.7) (2.7а) Помимо полезной мощности рабочего органа Риех через кинематическую цепь передается мощность потерь, возникающих в звеньях этой цепи - в промежуточных передачах н устройствах. Мощность потерь в значительной мере зависит от полезной нагрузки. При приведении нагрузок (моментов и сил) следует учитывать моменты и силы потерь трения, возникающих в отдельных участках кинематической цепи при передаче энергии. Расчет их весьма сложен. Как правило, для учета потерь трення используется КПД механизма. Для участка i - k кинематической цепи при последовательном соединении звеньев %* = Пчу. (2.8) где - КПД /-Г0 звена. Мощность, передаваемая через /-е звено, при работе электропривода в двигательном режиме РгРщ + Рг- (2.9) Соответственно момент или сила, приложенные к /-му звену, Л1/ = Л1пр,иех + ДЛ1тр/ = Л1пр,мех/П/мех; (2.10) Fj = Fnp. ех + Д/=тр/ , ех/Л/ ех. (2. Юа) В тормозном режиме Р/ = Риех-ДР/; =Лпр, иех - AAlip/ = Map, мехЛ/мех Fj = Fnp, нех - Дтр/ = f пр, иехЛ/иех- Здесь ДР/ - потери мощности на участке между /-М звеном и рабочим органом; ДМр/, Дтр/ - момент и сила, соответствующие потерям мощности, ЛЛ1тр/= ДР (Опр; Дтр/ = = ДР/пр; Шпр н Опр - угловая и линейная скорости элемента, к которому приводится расчетная эквивалентная схе.ма; пр.мех. /пр. мех - момент И сила на элеуен-те, к которому приводится расчетная эквивалентная схема. Значения КПД при номинальных нагрузках приведены н табл. 2.2, причем они зависят от ряда факторов и прежде всего от загрузки механизма. На рис. 2,6 показаны зависимости изменения КПД от относительной загрузки механизма - Рмех/мех.нои. где Рмех. НОИ - номинальнаи мощность ра-обчего органа. (2.11) (2.12) (2.12а) Таблица 2.2. Зиачеин1 КПД механических передач (без учета потерь трения в подшипниках*)
* Трение в опорах учитывается введением условного КПД подшипников; для однов пары подшипников качения щ =0,99-0.995; сколь- жения Г1 = 0.98 ~ 0.9! ** Zi - число заходов червяка.
О 0,2 0,Ц 0,В 0,8 1,0 /мех Рмех,ном Рис. 2.6. Зависимости КПД от загрузки механизма. 0,8 0,В о 0,2 0,4 0,В 0,8 1,0 Рис. 2.7. Зависимость КПД червячного самотормозящего редуктора от относительной скорости. Для винтовых И червячных передач КПД в значительной мере зависит от скорости и направления передачи энергии, причем 1пр > Побр. Здесь Т1пр - КПД прямой передачи от червяка к колесу (от винта к гайке) §2.3] Уравнения движения электропривода Побр - КПД обратной передачи от колеса к червяку (от гайки к винту). В качестве примера на рис. 2.7 показаны зависимости КПД червячного редуктора от относительной скорости. 2.3. УРАВНЕНИЯ ДВИЖЕНИЯ ЭЛЕКТРОПРИВОДА Наиболее удобным методом составления уравнения движения механизмов является метод уравнений Лагранжа второго рода. При этом предполагается, что движение механизма исследуется в системе обобщенных координат, в качестве которых должны быть приняты независимые параметры, определяющие положение механизма, а именно углы поворота вращающихся вокруг неподвижных осей дискретных инерционных элементов нлн их линейные перемещения. Уравнение Лагранжа второго рода di \ d4i ) dQi dQi dgi -Qi. (2.13) где - кинетическая энергия системы; W - потенциальная энергия системы; В7д - работа сил рассеяния (дисснпатнвная функция Релея); qi - обобщенная координата; qi - обобщенная скорость; Qi - обобщенная внешняя сила, соответствующая обобщенной координате. При вращательном движении qt = Ф<; = Щг Qi = Ml. Прн поступательном движении, qt = xi; qt = Vii Qi = f j. Число уравнений Лагранжа второго рода для системы равно числу дискретных инерционных элементов, т. е. числу степеней свободы механизма. Для механической системы, содержащей п инерционных и я - 1 упругих элементов, или 1Fk= 21 -Г - В7 = 2 Р-Р-Ф) или г = 1 п-1 2<: uui(Xi-XiiY , 2 (2.15) нли \Рд = я -1 feai,m(W -fj+l) (2.16) Моменты (силы), входящие в левую часть (2.13) и действующие на t-й инерционный элемент системы, определяются как инерционные ±fdWA ~ dt\ д(01 j (Of dJ Рии1 = Щ- + vf dnii 2 d(ei (2.17) (2.18) (2.19) потенциальные Mjjt = - Скр1-1, t (Фг-i-Фг) + +Cicp<.i+i(fi-fi+i); Pni= - xl-i, i (*j-i - *i) + +cjd,ui(xi-xut): и диссипативиые Мд=- Акрг 1,/ (<o, i -<Dj) -f +*KP<.f+i(®f- fД=- Ал1-1, i (Щ-t - f .) + В соответствии с (2.13) для любого i-ro звена может быть записано уравнение движения Ма+Мт + М1=Мвв1\\ J2 20) гц& Mj,Bi (Рввд- суммарный внешний момент (сила), действующий на 1-е звено. В тех случаях, когда момент инерции (масса) звена не зависит от его положения, dJildifi = О (dmi/dxi = 0), соответственно Mmi = Jfii н Fi = ntiOt. (2.21) Диссипативиые снлы в упругих связях, как правило, существенно меньше потенциальных сил, в связи с чем при исследовании законов движения электроприводов механизмов в первом приближении их можно ие учитывать. С учетом указанных допущений уравнения движения в случае вращательной схемы приведения для трехмассовой системы (см. ряс. 2.5, б) имеют вид: Ji dai/dt + Cja (ф1-ф ) = Мд,; J 2 dati/dt - (ф, - фа) -f + Саз(Ч>2 -ф8)=Л1пр2; Js йШз/Л - Сзз (ф2 - фз) = Мпр. ех- Для двухмассовой системы (см. рис.2.5, а) /, 4Ш1/Л-Ьс12(ф,-ф,)=-Л1дв; 1 /gdmj/d/-Си{ф1-ф2) = Л1цр,ивх. / Для одномассовой системы (см. рис, Jdm/dt = M-M (2.24) На рис. 2.8 показаны соответстауюшзе приведенным уравнениям структурные схемы механической части электропривода, на которых моменты упругих элементов обозначены Mi.Ht (р) = c,p f [mj Op) - й)г (p)J/p. (2.22) (2.23)
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


