
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода временно с двигателем, а с некоторой задерж- Стабилизация скорости в электроприво- кой по времени, например после окончания дах с управляемым преобразователем па-электрического торможения (рис. 8.1 >41;-Пряжения в цепи статора обеспечивается в замкнутой системе управления с отрица- тельной обратной связью по скорости, потому что преобразователь- напряжения в разомкнутой системе обеспечивает регулирование момента электропривода. В качестве управляемых преобразователей напряжения используются тиристорные преобразователи (регуляторы) напряжении [8.7]. Функциональная схема асинхронного электропривода с преобразователем напряжении в цепи обмотки статора приведена на рис. 8.12, а. Преобразователь напряжеивя U с управляющим устройством AS, в качес?1ве которого используется СИФУ тнристорного преобразователя, получает на вход сигнал рассогласования по скорости, равный где Us - задающее напряжение системы регулирования скорости; Ас = - коэффициент обратной связи по скорости прн использовании в качестве датчика обратной связи тахогенератора постоянного тока. Напряжение управления Uy может быть уси- сг Т Рис. 8.10. Узлы схем, осуществляющие конденсаторное торможение ЛД. Выдержку времени обеспечивает реле времени КТ, получающее команду на начало отсчета времени, обычно при отключении линейного контактора КМ1 (рис. 8.11, в). В асин- I I I 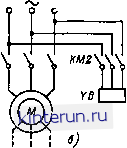 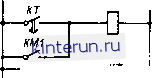 -7\ KM1 Д. Рис. 8.11. Узлы схем, осуществляющие механическое торможение. хроиных электроприводах применяются также электромагнитные тормоза постоянного тока при управлении электродвигателем от сети постояииого тока. Они включаются с форси-ровкой так же, как в электроприводах постоянного тока (см. рис. 7.11). 8.2. СИСТЕМЫ СТАБИЛИЗАЦИИ СКОРОСТИ И МОМЕНТА ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА Стабилизация (регулирование) скорости и момента в электроприводах переменного тока осуществляется с помощью управляемых преобразователей (регуляторов) переменного напряжении сети и преобразователей частоты, питающих обмотку статора, управляемых преобразователей в цепи ротора (реостатное регулирование и регулирование по схеме асинхронно-вентильного каскада) и с помощью электромагнитной муфты скольжения. лено промежуточным усилителем А, обеспечивающим сигнал управления преобразователя в виде - kyUy, где ky - коэффициент усиления усилителя. В разомкнутой системе регулирования при изменении сигнала управления преобразователем Ыу,р происходит регулирование момента и обеспечиваются механические характеристики 1 - 4 (рис. 8.12, б). При автоматическом управлении в замкнутой системе с отрицательной обратной связью по скорости напряжение иа обмотке статора АД определяется действием обратной связи U(Ua-kc(i Ау*п. где k - коэффициент усиления преобразователя, включающий в себя при тиристорном преобразователе коэффициенты регулировочной характеристики СИФУ а = f ((/у ,) и тиристорного выпрямителя Ug= f (а). В этом случае электропривод обеспечивает жесткие механические характеристики определиемые различными зиаченяями за дающего напряжения Uai, U32, U33, (/34 (рис. 8.12,6). Диапазон регулирования скорости в таких электроприводах может достигать 10 : 1. 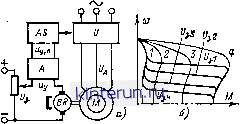 Рис. 8.12. Функциональная схема асинхронного электропривода с преобразователем напряжения в цепи обмоткн статора. Ввиду сложной зависимости момента и скорости двигателя от напряжения на обмотке статора Л1 = Мш, 6/д) = гМкСйок (Ц>о-оа) и а анализ работы асинхронного электропривода преобразователем напряжения может быть
Здесь Р = ДЛ1/Лш - модуль жесткости механической характеристики в разомкнутой системе электропривода; Т = Р - электромеханическая постоянная времеии электропривода; - суммарный момент инерции электропривода, приведенный к валу двигателя; A = ЛЛ1/А1/д - коэффициент; Л{/д - напряжение двигателя (по первой гармонике). В установившемся режиме при оо из дифференциального уравнения получается уравнение механической характеристики электропривода при М = \изкук к -Мс Р + АсАуАпАм Статизм характеристик определяется коэффициентами усиления усилителя, преобразователи и коэффициентом обратиой связи и тем ниже, чем выше значение этих коэффициентов. При расчете механических характеристик следует учитывать, что коэффициенты kji я к являются непостоянными и их зиачеиия должны определяться в зависимости от требуемых значений скорости. Применение преобразователей (регуляторов) напряжения для регулирования скорости АД с короткозамкнутым ротором в Л(в = а Me Рис. 8.13. Структурная схем асинхронного электропривода напряжения. преобразователем переменного Проведен качественно [8.1] по структурной схеме электропривода, приведенной иа рис. 8.13. Структурная схема составлена при линеаризации уравнения М = f {ш, U), без учета электромагнитных переходных процессов в двигателе и при безынерционных усилителе и преобразователе с управляющим устройством. Передаточная функция системы электропривода при управляющем и возмущающем воздействиях имеет следующий вид: Am (jD) W(P): Р(7иР+1) + МуМи Переходный процесс изменения скорости описывается дифференциальным уравнением РГ + (Р + Ас W ) А = -Кизкукк-Ш. замкнутой системе ограничено в продолжительном режиме из-за невысокого диапазона регулирования при постоянном моменте нагрузки вследствие значительных потерь в двигателе. Более экономичен электропривод с асинхронным двигателем с фазным ротором и дополиительным сопротивлением в цепи ротора. Электротехническая промышлеииость для пуска, реверса торможения и регулирования скорости выпускает тиристорные станции управлеиия. 8.3. РЕГУЛИРОВАНИЕ МОМЕНТА И СКОРОСТИ ЧАСТОТНО-УПРАВЛЯЕМЫХ ЭЛЕКТРОПРИВОДОВ Современные системы регулирования частотно-управляемых электроприводов выполняются, как правило, по принципу подчиненного регулирования переменных (см. § 7.4). Синтез систем автоматического управлеиия указанного типа имеет ряд специфических особенностей, связанных со своеоазием АД н преобразователя частоты как объектов регулирования. На характеристики электропривода существенное влияние оказывают электромагнитные переходные процессы в системе ПЧ - АД, пренебрежение которыми не только не позволяет получить высокие динамические показатели, но н вызывает серьезные затруднения в обеспечении устойчивости электропривода. Основные трудности синтеза САУ данными электроприводами связаны в первую очередь с чрезвычайной сложностью АД как объекта регулирования. Как следует из рассмотрения структурных схем АД, он принципиально является многоканальным объектом регулирования с большим количеством нелинейных перекрестных свнзей между каналами. Кроме того, состояние АД определяется совокупным действием всех его фаз, причем управляющие воздействия (напряжения нлн токн) не являются постоянными величинами даже в установившихся режимах. Как показывает опыт создавия высококачественных САУ, синтез частотно-управляемых электроприводов традиционными способами, основанными на линеарнзгн дифференциальных уравнений объекта и прнмене-внн частотных методов, оказывается чрезвычайно трудоемким и малоэффективным. Указанные обстоятельства привели к тому, что в последнее время сформировался новый подход к синтезу систем автоматического управления АД. Он предполагает использование полных дифференциальх уравнений АД, полученных на основе теории обобщенной электрической машины [8.6]. Прн этом большое значение имеет рациональный выбор переменных, относительно которых синтезируется САУ, и рациональное ориентирование координатной системы относительно выбранных переменных. Это дает возможность в ряде случаев существенно упростить задачу синтеза. При синтезе САУ производится компенсация нелннейностей объекта и нейтрализация внутренних связей, что позволяет применить к преобразованной структуре методы подчиненного регулирования, хорошо зарекомендовавшие себя в электроприводах постоянного тока. При описании системы широко используется метод обобщенных векторов, с помощью которого удается в наиболее удобной форме представить результирующее влияние всех фаз АД на ее состояние. В настоящее время разработано большое количество различных САУ асинхронными электроприводами. Разделяя нх по способу ориентации координатной системы, в которой осущесталяется регулирование векторов напряження, тока и потокосцепления, можно отметить системы с ориентацией координатной системы по направлению вектора потокосцепления ротора и с ориентацией относительно положения ротора. Примером САУ первого типа является система Трансвектор , разработанная фирмой Скменс [8.10]. 6 ней в наиболее полном виде используются изложенные выше принципы синтеза САУ переменного тока. В основу синтеза положены дифференциальные уравнения приведенного АД, записанные в ортогональной системе координат х, у, о, ось х которой ориентирована по направлению результирующего вектора потокосцепления ротора Эти уравнения имеют следующий внд: Lr dt dt,:c Usy-- fdi. + r,i- (8.1) (8.2) (8.3) (8.4) (8.5) где Mjjf, 5, - составлякнцие напряжения статора; Igx, - составляющие тока статора; - модуль результирующего вектора потокосцепления ротора; М - электромагнитный момент; = Шк - со - круговая частота скольжеиня ротора относительно поля ротора; (Dk - угловая скорость осей координат; ю - угловая электрическая скорость ротора; Ts, Tf - активные сопротивления обмоток статора н ротора; Lg, - полные индуктивности обмоток статора н ротора; Тг = Lfir, - электромагнитная постоянная времени ротора; - взаимная индуктивность между статором и ротором (индуктивность намагннчивапия); р - число пар полюсов обмоткн статора. Из (8.3) и (8.5) следует, что модуль вектора потокосцепления ротора определяемся проекцией вектора тока статора на направление потока ротора, а момент - произведением модули потокосцепления ротора на составляющую тока статора, ортогональную потоку ротора. Рассматрнваемаи система регулирования выполнена так, что измеренные реальные значения потокосцеплений ротора и тока статора преобразуются к ортогональной системе координат, сориентированной по направлению вектора потокосцеплений ротора. В результате образуются постоянные сигналы, пропорциональные Т if И igy, которые используются при раздельном регулировании этих величин. При этом контур регулирования составляющей ix является внутренним но отношению к контуру регулирования потокосцеплений. а контур регулирования - внутренний по отношению к контуру регулирования скорости. На выходе регуляторов ix н igy образуются управляющие наприжения, которые после обратного преобразования в неподвижную систему координат
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


