
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода В качестве последовательных корректирующих устройств принимаются регуляторы тока, якоря, скорости, ЭДС и тока возбуждения (потока) двигателя и оптимизация системы осуществляется с помощью подчиненного регулирования параметров. Такие электроприводы выпускаются комплектно в виде тирнсторных электроприводов с регуляторами напряжения и скорости серии КТЭ 17.27]. Упрощенная функциональная схема реверсивного двухзонного электропривода типа КТЭ приведена иа рис. 7.45. По каналу управления иапряжеинем на якоре двигателя она представляет собой двухконтурную систему с регуляторами скорости Л К и тока АА, а по каналу управлеиия током возбуждения тоже даухкоитурную систему с регуляторами тока возбуждения (магнитного потока) АФ и ЭДС двигателя АЕ. Регулятор скорости может быть пропорциональным (П) и пропорционально-интегральным (ПИ). В первом случае система регулирования скорости является статической при изменении нагрузки, а во втором - астатической. Устройство А1 корректирует коэффициент усиления в фуикции изменения магнитного потока, что компенсирует изменение динамических параметров даигателя при изменении магнитного потока. Регулятор магнитного потока сделан пропорциональным, а регулятор ЭДС - пропорционально-интегральным. При скорости даигателя нюке основной и значении ЭДС даигателя ниже номинального значения усилитель регулятора потока насыщен и регулятор л £ на выходе выдаст напряжение, опре-деяякнцее задание номинального значения нагиитного потока. При скорости выше основной усилитель регулятора АЕ выходит из насыщения и сигнал выхода АЕ снижается, снижая задание значения магиитнснч) потока. Устройство А2 корректирует коэффициент усиления регулятора в зависимости от зиачеиия магнитного потока. Выходаой сигнал АЕ ограничен также минимальным значением магнитного потока Фт1п> сигнал которого Иф подается от потенциометра RP9 по схеме или вместе с ф, иа вход регулятора АФ. Сигнала обратных связей по току якоря, скорости, току возбуждения и ЭДС подаются соответственно от датчиков тока якоря UA1, скорости BR, тока возбуясдения UA2. Сигнал, пропорциональный ЭДС,-получается вычитанием сигнала, пропорционального падению напряжения в якорной цепи, из сигнала, пропорционального напряжгаию якоря, взятых с датчиков напряжения UV ш тока якоря UA1. Все даиамические режимы в реверсивном влектроприводе (разгон, реверс и торможение) осуществляются с постоянным ускорением, формируемым задатчиком иитеисивио-ста SJ. При разгоне двигателя до основной скорости напряи£еийе задатчика нарастает линейно, обеспечивая постоянное ускорение привода, а при разгоне до скорости выше основной ускорение меняется в функции магнитного потока по закону, обеспечивающему постоянство динамического тока даигателя прн саиж ]ин магиитиого потока. Список литературы 7.1. См. [6.31. 7.2. См. [6.2]. 7.3. Елисеев В. А. Релейное управление электроприводами. - М.: МЭИ, 1980. - 104 с. 7.4. Основы автоматизированного электро привода / М. Г. Чиликни, М. М. Соколов, В. М. Терехов, А. В. Швнянсквй. - М.: Энергия, 1974.- 7.5. См. [1.1]. 7.6. Ильинский Н. Ф. Электроприводы постоянного тока с управляемым моментом. - М.: Энергоиздат, 1981. - 144 с. 7.7. Уиравдеиие вентильными электроприводами постоянного тока / Е. Д. Лебедев, В. В. Неймарк, М. Я. Пнстрак, О. В. Слежанов-ский - М.: Энергия, 1970. - 200 с. 7.8. Фрер Ф., Ортеибургер Ф. Введение в электронную технику регулирования. - М.: Энергия. 1973. - 192 с. 7.9. См. [3.6]. 7.10. Фишбейи В. Г. Расчет систем подчиненного регулирования вентильного электропривода постояииого тока. - М.: Энергии, 1972. - 136 с. 7.11. Гариов В. К., Рабинович В. Б., Виш-невецкий Л. М. Унифицированные системы управлеиин электроприводом в металлургии. - М.: Металлургия. 1971. - 216 с. 7.12. Воронов А. А. Основы теории автоматического управления, Ч. I и II. - Л.: Энергии. - 376 и 364 с. 7.13. Честиат Г. И., Майер Р. В. Проектирование и расчет следящих систем и систем регулирования. Ч. 1 и П. - Л.: Госэнергоиздат, 1969. - 487 и 392 с. 7.14. Kessler С. Tiber Voraosberechnong optimal abgestlmmter Regelkreise. - Regelungstech-nlk, 1964, № 12, S. 274-281, 1956, J* 1, S. 16-22; J* 2, S. 40-49. 7.15. J6tten R. Zur Theorle und Praxis der Regeluns von Stromrlchterantrieben, Tell I. - Regelnngstecbnlk. 1959, № 1. 7.16. Унифицированные системы управления электроприводами постоянного тока / О. В. Слежаиовсиий, М. Н. Аявсимов, Е. Д. Лебедев, В. М. Перельиутер, Д. Я. Перчик. - Электро-техническаи промышленность. Электропривод, 1976, № 6. 7.17. Bnxbanm Д., Anfbau nnd Ponktions Welse des adaptiven Ankerstromreglers. - Techn. Mltteilnngen AEG Telefunken, 1971, № 7. 7.18. Динамика веятилъного электропривода постоянного тока. - И. В. Донской, Н. Г. Иванов, В. М. Никитин, А. Д. Поздеев. - М.: Энергии, 1976. - 224 с. 7.19. Решмии В. И., Ямпольский Д. С. Проектирование и наладка систем подчиненного регулирования электроприводов. - М.: Энергия, 1975. - 184 с 7.30. Слежавоаский О. В.. Бирюкоа А. В.. Хуторецкий В. М. Устройства уинфнцированной блочной системы регулировании дискретного типа (УБСР-Д). - М.: Энергия, 197бг- 256 с. 7.21. Кэтермоул К. В. Принципы импульсно-кодовой модуляции / Пер. с англ. под ред. В. В. Маркова. - М.: Связь, 1974. - 408 с. 7.22. Преобразованне информации в аяало-го-цифровых вычислительных устройствах я системах / Под ред.,Т. М. Петрова. - М.: Машиностроение, 1973. - 360 с. 7.23. Цыпкии Я. 3., Попков Ю. С. Тейэриа нелинейных импульсных систем. - М.: Наука. Главиаи редакции физико-математической литературы, 1973. - 416 о. 7.24. Основы автоматического регулирования и управлении / Под ред. В. М. Пономарева и А. П. Литвинова. - М.: Высшая школа, 1974.- 439 с. 7.25. Кулесский Р. А.. Шубеико В. А. Электроприводы постояииого тока с цифровым управлением. - М.: Энергия, 1973. - 208 с. 7.26. Гусев В. Г. Методы исследовааии точности цифровых автоматических систем. - М.9 Наука, Главная редакция физико-математической литературы, 1973. - 400 с. 7.27. Комплектные тиристорные электроприводы с регуляторами напряжения и скорости (Каталог 08.30.10 = 75. НИИХЭМЗ). - М.; Ивформэлектро, 1975. - 287 с S 8.1] Типовые узлы схем резисторных злектроприводов Раздел восьмой УПРАВЛЕНИЕ ЭЛЕКТРОПРИВОДАМИ ПЕРЕМЕННОГО ТОКА 8.1. ТИПОВЫЕ УЗЛЫ СХЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЗИСТОРНЫХ АСИНХРОННЫХ ЭЛЕКТРОПРИВОДОВ 8.1.1. Пуск асинхронных двигателей Пуск АД с короткозамкнутым ротором малой и апедией мощности на напряжение до 1000 В осуществляется прямым подключением обмотки статора на напряжение питающей сети. Такое подключение осуществляется контактами контакторов, как показано Р 9 9 КМ Рис. 8.1. Схема пуска и остановки АД с короткозамкнутым ротором. на рис. 8.1. Команды на пуск и остановку двигателя подаются кнопками управлеиия SB2 и SB1. Для этого могут применяться и другие командные устройства. Схемы управления подключаются непосредственно к ни- ток статора и обеспечивающие разные числа пар полюсов и скорости двигателя. На рис. 8.2, а приведена схема двухскоростиого АД, имеющего одну обмотку, включаемую и треугольник при малой скорости и в двойную звезду - при большой. Переключение секций ойиотки обеспечивают контакторы КМ1 и КМ2. Команды иа пуск иа малую и большую скорости подаются кнопками управлеиия соответственно iSB2 и SB3. Команда иа отключение двигателя подается кнопкой SB1. Могут использоваться также командоконтроллеры н универсальные переключатели SM. Схема предусматривает изменение скорости АД в процессе работы без остановки с помощью размыкакпщ1Х контактов кнопок управления, отключающих предварительно ранее включенный контактор. Силовая схема АД с двумя разиьши обмотками приведена иа рис. 8.2, б. При трехскоростиом АД в схеме, используются три линейных контактора, например КМ1 - КМЗ, подключакяцих обмотки статора иа три скорости. В качестве схемы управлеиия может использоваться простая схема, приведенная на рис. 8.2, в [8.4J. Схтл обеспечивает пуск двигателя и переход.его иа любую из трех скоростей. Нажатие кнопок SB2 - SB4 приводит к включению линейных коитактор<ш KMl - КМЗ, которые своими главными контактами обеспечивают схемы включения обмотки статора с числами пар полюсов, обеспечивающими требуемую скорость. Асинхронный двигатель с короткозамкнутым ротором, а также синхронные диига- С 9 9 Ш S82 SBS Ъ£ ste ш т КМ1 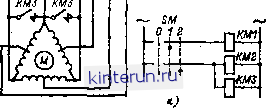 9 9 0  Рис. 8.2. Схема управления двухскоростным АД с короткозамкнутым ротором (а), схема силовых цепей АД с двумя обмотками <б) н схема цепей управлекня трехскоростным АД (*). тающей сети илн через трансформатор, осуществляющий потенциальное разделение цепей управлеиия и снижающий напряжение цепи управлении. Для управления миогоскоростнымн АД с короткозамкнутым ротором приигеияются схемы, осуществляющие переключение обмо- тели, имеющие иа роторе короткозамкиутую пусковую обмотку, большой мшцности при ыалсмощных штающих сетях пускахпся с ограничением пусковых токов я моментов двнг1пелей. Для этой веля нонмьзуется вуск при снижении напряжеяни на статорах двигателей путем включеввв в статориую цепь на время пуска дополнительных резисторов, реакторов или автотрансформаторов. Узлы схем с резисторами R и реакторами L приведены соответственно на рис. 8.3, а, б. По управлению схемы идентичны. Пониженное иапряжеиие на статор двигателя подается включением контактора КМ2, а в конце пуска контактором КМ1 шунтируются резисторы или реакторы и на статор подается полное напряжение. Контактор КМ2 выключается. Эти схемы используются при пусках с низкими пусковыми моментами, так как момент двигателя в них при пуске, если пренебречь токаи намагничивания, снижается пропорционально квадрату отношения токов ска, при котором момент двигателя изменяется согласно рис. 8.3, г сначала по характеристике 3, а затем 2 и в конце пуска при подаче полного напряження - по характеристике 1. Для этого сначала включаются контакторы КМ2 и КМЗ (см. рис. 8.3, в) и на статор подается пониженное напряжение через автотрансформатор, затем контактор КМЗ выключается и пуск продолжается с реакторами, в качестве которых используются обмотки автотрансформатора, рассчитанные на этот режим. В конце пуска включается контактор КМ1 и полное напряжение сети подается на статор двигателя, а контактор КМ2 включается.  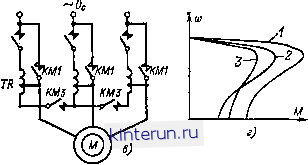 Рис. 8.3. Схемы пуска мощимх АД с короткозамкиутым ротором и СД при питании от маломощ-воЯ сетн с резисторами (а), реакторами (б) и автотрансформатором (в) и механические характеристики двигателя прн различных способах пуска (а). в Принятой схеме и в схеме прн прямом пуске Л1 ., п, п =к . где Л1п,с. /п,с - сниженные значения пусковых момента и тока двигателя в схеме с резисторами и реакторами; /Ид,п. /п,п -значения пусковых момента и тока в схеме при прямом пуске; К - кратность снижения пускового тока. Узел схемы с автотрансформатором TR приведен иа рис. 8.3, в. При управлении пуском сначала включаются контакторы КМ2 и КМЗ и иа статор двигателя через автотрансформатор подается пониженное напряжение, а в конце пуска контакторы КМЗ и КМ2 отключаются, а контактор КМ1 включается и на статоре двигателя оказывается полное напряжение питающей сети. Схема используется при пусках двигателей с высокими пусковыми моментами, так как в этой схеме момент двигателя при пуске снижается пропор-циоиально первой степенв отношения токов. Примерные электромеханические характеристики двигателей при пуске с резисторами или реакторами (кривая 2), с автотрансформатором (кривая 5) и при прямом пуске (кривая 1) показаны иа рис. 8.3, г. Схема с автотрансформатором мо>1ет использоваться для осуществления комбинированного автотраисформаторно-реакторного пу- При пуске АД с фазным ротором пусковые токи ограничиваются резисторами, включенными в цепь ротора. Напряжение на обмотку статора подается контакторами, как показано на рис. 8.4. При использовании трехфазных контакторов переменного тока применяется один контактор, а при использовании однополюсных или двухполюсных контакторов постоянного тока применяются соответственно три илн два контактора. Пуск производится с примерно постоянным значением пускового момента, что обеспечивается отключением ступеней пускового резистора при спадании момента двигателя до значения момента переключения Мдер-,Отключение ступеней пускового резистора производится замыканием контактов контакторов ускорения КМ2 - КМ4 при трехступен чатом пусковом резисторе R1, R2 и R3 Число ступеней пускового резистора выби рается в зависимости от требований поддер жания постоянства пускового момента дви гателя и от моментов статической нагрузки Приведенные на рис. 8.4 схемы включения пусковых резисторов и контактов контакторов ускорения применяются для двигателей с номинальным током ротора, не превышают щим 900 А. Наибольшее распространение получила схема с двумя контактами контакторов ускорения (рнс. 8.4, а), как наиболее простая. Схемы с тремя контактами, включенными звездой (рис. 8.4, б) или треугольником (рис. 8.4, б), применяются редко, только
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


