
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Включение и отключение пусковых и тормозных резисторов осуществляется контактами контакторов ускорения (КМ1) и торможения КМ2, как это делалось при питании двигателя от сети (см. § 7.1). Для управления пуском и торможением используются принципы управления, применяемые в резисторных электроприводах (см. § 6.1). Использование пусковых и тормозных резисторов является недостатком электропривода с неуправляемым выпрямителем в цепн якоря двигателя. Для обеспечения номинального магнитного потока прн пуске двигателя до основной скорости в схеме используется блокировка, осуществляемая вспомогательным контактом последнего контактора ускорения КМп который до его включения обеспечивает сигнал для цепи возбуждения в, 3-с - кт, o(i-Iотс) 1 (Д/) = у, в. (7.31) Иу, ву, в- у.п, bi п, о - п, ву, в-п, в Ьп, в вп,в/Й; en,b = b b + I-b*b/d<; в*в( в) = Ф. где Мв,з Иу,в - задающее напряжение и напряжение управления в цепи возбуждения; ,в1 п,в-коэффициенты усиления проме- жуточного усилителя AL и преобразователя цепи нозбуждения UL; Гд.д - постоянная времени преобразователя uL; вщ - ЭДС преобразователя UL; i Ф - ток возбужде- 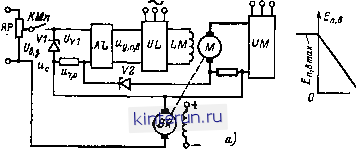 Еп,вт1п  Рис. 7.40. Функциональная схема электропривода с регулированием скорости магнитным потоком (а); характеристика преобразователя VL (б) н кривая намагничивания двигателя (в). управления преобразователя Ку/д, равный нулю (f/y,b = 0). После включения КМп на вход подается сигнал Ив,з. заданный задатчиком скорости RP. Для ограничения тока двигателя при пуске его до скорости выше основной в таких электроприводах используется стабилизация тока, осуществляемая отрицательной обратной связью по току с отсечкой, воздействующей на магнитный поток двигателя. Анализ установившихся и переходных режимов с управляемым преобразователем в цепи возбуждения двигателя связан с трудностями, определяемыми наличием нелинейных зависимостей: магнитного потока двигателя от тока возбуждения Ф = f (/д), зависящей от кривой намагничивания двигателя и петли гистерезиса (рис. 7.40, е); напряжения возбуждения двигателя от напряжения управлеиия 11= f ( у,в), зависящей от характеристики преобразователя (рис. 7.40, б); момента статической нагрузки от скорости М= f (а), часто имеющей место в промышленных механизмах, и двух произведений переменных: вд = кФ(о я М = АФ/, где k - конструктивный коэффициент двигателя. Динамические процессы электропривода описываются следующей системой дифференциальных уравнений: для цепи якоря двигателя E ka><i>+iR + LcU/dt; M-Mc=k(bi-Mc=J dtiildt, (7.30) ния и магнитный поток двигателя; R, Lb - активное сопротивление и индуктивность цепи двигателя; kis - коэффициент пропорциональности между магнитным потоком и током возбуждения. Установившиеся режимы оцениваются системой уравнений, полученных из (7.30); при t-*- оо, когда все производные равны нулю. Однако из-за квадратичной зависимости скорости от момента аналитический расчет механических или электромеханических характеристик затруднителен, хотя он может быть проведен на вычислительной машине. Для простых инженерных расчетов может быть использован графоаналитический метод. В режиме стабилизации скорости задаются значениями Иу,в, для каждого из которых определяют значения ЭДС преобразователя возбуждения £д,в, тока возбуждения /в, магнитного потока Ф (по кривой намагничивания на рис. 7.40, е) и значение АФ. Затем определяются значения скорости и тока а>= ; / = (£п -Фа /й. При одновременном действии отрицательных о(атных связей по скорости и току после определения значения АФ следует решить систему уравнений с двумя неизвестными - (й и /: £д = Фш + /й; г/в,а = М - *т, о - отс)- При наличии в схеме ограничения входного сигнала управления (усилителя AL), осуществляемого с помощью стабилитрона Vt, при действии токовой отсечки связь по скорб-сти отключается. В этом случае определяются ток и скорость: (0=(E -IR)/kO. где l/yj-напряжение ограничения сигнала управлеиия; Uo пряжение по току. Ат.о/отс - опорное на- Можно провести анализ поведения системы электропривода в конечных приращениях с предварительной линеаризацией нелинейных характеристик в окрестности значения установившегося режима {7.2]. Зпектропривод с регулированием скорости изменением магнитного потока может быть оптимизирован с помощью последовательной коррекции с использованием регулятора скорости 17.5]. Функциональная схема такого электропривода приведена на рис. 7.42, а. При оптимизации электропривода нелинейные звенья линеаризуются в точке статического равновесия, а перемен- 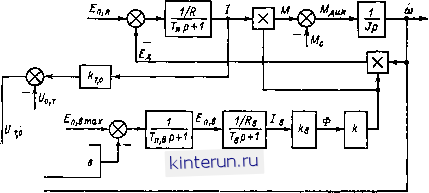 Рве. 7.41. Структурвав схеша электропривода с регулвроваивеи скорости иагиитиыш аотокои. Динамические режимы могут быть оценены по структурной схеме, составленной по [7.5] и приведенной на рис. 7.41. Анализ аналитическими методами переходных режимов затруднен из-за наличия блоков перемножения. Для анализа удобнее пользоваться вычислительными машинами. иые рассматриваются в конечных приращениях относительно этой точки. Тогда дифференциальные уравиеиия звеньев системы электропривода при О, Alj = О, I/, = == t/нои имеют следующий вид: ДИу = {7п.вР+1) Аив/Аш !  Хп,в &Ue kg/Re ТвР+1 Шуст уст(Тм,устР+1) Рис. 7.42. Функциональная (а) н структурная (б) схемы электроприводг с регуяироваинем скорости иагинтныи потоком с регулятором скорости. Дф= фу у . номР+ 1) Дй>/й>уст. где Дму, Див. ДФ и Дш - конечные малые приращения переменных относительно точки статического равновесия, по отнолкнию соответственно к ааачениям t/y.ycT. t/в уст. Фуст. y=iJ?,?T2? 4*: п.в. 7в= Lb/J? г у = = JRJie<!>j -постоянные времени: преобразователя, цепи возбуждения двигателя и электромеханическая, определяемая в точке статического равновесия при Ф = Фу . Структурная схема электропривода с регулятором скорости приведена на рис. 7.42, б. Для учета противоположных знаков ДФ и Дш на вход системы условно подается постоянное задающее напряжение Уз,е, опреде- 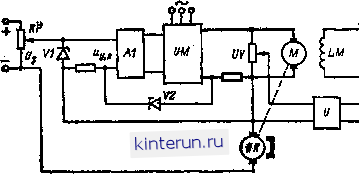 ных времени системы Г, уст и Т , зависящих от Ф, изменяется в сторону демпфирования динамических процессов [7.5]. При необходимости ограничения тока якоря в систему электропривода вводится подчиненный контур регулирования тока якоря [7.5]. При двухзониом регулировании скорости используется двухзонный электропривод. Электротехническая промышленность выпускает такой комплектный апектропривод типа ЭТЗ для станкостроительной промышленности (см. раэд. 14). Функциональная схема двухзонного электропривода приведена на рис. 7.43. Обмотка якоря двигателя М питается от управляемого преобразователя им, а обмотка возбуждения LM - от управляемого преобразователя UL. Стабилизация Рис 7.43. Функциональная схеша двухзонного элеитропривода. ляющее заданную скорость, и вычитается из него значение приращения Дкз.с. При настройке системы на технический оптимум для получения оптимальной передаточной функции разомкнутой системы, в виде р з(Р) = 1/2Г(7цР+1) при = Гц,в принимается ПИД-регулятор. скорости с передаточной функцией [7.5] Wp, с (Р) = (Гв р+1) (Г., у р+ 1)/Г, где Гв = (спв,*вй>уст/?вФуст) 2Гр1. в результате наличия в регуляторе скорости интегральной составляющей система обеспечивает астатическое регулирование скорости по управляющему и возмущающему воздействиям с быстродействием системы, определяемым значением 2Гц. При Li,j = О постоянная времени якор-Ш)й цепи двигателя может быть учтена увеличением суммарной некомпенсируемой постоянной контура = Гп,я + Га- Из-за наличия нелинейных характеристик звенья оптимальная настройка, произведенная для одной точки статического рав-яовесвя, не сохраняется для других значений Фуст и Шуст- Поэтому настройку контура осуществляют при минимальном значении магантного потока. В этом случае ирн уснле-шн магнитного потока соотношение постоян- скорости н тока осуществляется с помощью отрицательных обратных связей по скорости н току с отсечкой, поданных на вход преобр зователя цепи якоря UM (см. § 7.1). С помощью этих связей стабилизация скорости и тока обеспечивается в обеих зонах регулирования скорости. Задание скорости в обеих зонах осуществляется одним задатчиком скорости RP. Управление скоростью ао второй зоне производится в зависимости от напряжения на якоре двигателя. Сигнал по напряжению подается от датчика напряжения UV через потенциальный разделитель, в качестве которого в электроприводе ЭТЗ используется мультивибратор U с коэффициентом передачи кв- Связь осуществляется через нелинейнаЙ- элемент (стабилитрон) V3 и настроена ,такМР образом, что при напряжении на якоре ниЖйГ-номинального значения, когда kU<. U ток через V3 не проникает и Иу, в = 0. Магнитный поток двигателя при этом имеет номинальное значение. При Uy ток проходит н магнитный поток ослабляется, причем полное изменение магнитного потока осуществляется при повышении напряжения иа яхоре двигателя сверх номинального на 5%. Пуск двигателя в двухзонном электроприводе проиадодигся при ступенчатом задающем воздействии со стабилизацией тоха якоря за счет отрицательной обратной связи по току.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


