
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода S 7.Ч Системы цифро-аналогового регулирования где и, к (О-выходной сигнал импульсно-кодовой системы; {f) - выходной сигнал идеальной аналоговой системы при одном и том же входном воздействии х (f); в (f) - ошибка квантования и дискретизации (рнс. 7.36, е). Точный расчет ошибок квантования и дискретизации, особенно в их совокупности, является достаточно сложной и полуинтуитивной математической задачей, которая даже без учета дополнительных усложняющих факторов (шумы во входном сигнале, неравномерность квантования и дискретизации и др.) требует полного знания множества возможных входных воздействий, определенной структуры и характеристик исследуемого объекта и громоздких расчетов, что иа практике далеко не всегда удобно и необходимо. Различают два характерных варианта выполнения ЦРС - дискретный цифровой и непрерывный цифро-аналоговый, jfcyrne варианты ЦРС в той или иной степени являются комбинацией первых двух. нальна угловой скорости двигателя где Ад - число импульсов на одни радиан поворота входного вала датчика. Поэтому число Nc, образующееся на выходе счетчика в моменты времени Го, также пропорционально угловой скорости двигателя: Лс=АдГвй). По окончании подсчета величина запоминается в регистре RG2 до следующего момента времени Го и сравнивается на входе сумматора AW1 с числом N, пропорциональным заданной скорости. Погрешность скорости в системе = = Лз - .Vc запоминается на время Го в регистре RG1 и является пропорциональной составляющей закона регулирования скорости. Интегральная составляющая образуется в соответствии с решетчатой функцией /j. (и) (см. разд. 9) посредством последовательного Ш,\---- azsv I I R&2 R&1 -I L- gu rg4- r&3 rg-5 Рнс. 7.37. Функановальвая схема двскретвого ЦРС. Упрощенная функциональная схема дискретного (циклического) частотного ЦРС показана на рис. 7.37. Аналоговая часть системы включает в свой состав регулятор тока АА, тиристорный преобразователь UM и двигатель М. Задание на вход контура тока с выхода цифрового регулятора скорости подается с помощью цифро-аналогового преобразователя Z/Y. В цифровой части регулятора скорости могут быть сформированы в зависимости от требований объекта регулирования трн составляющих закона регулирования скорости двигателя: пропорциональная, интегральная и дифференциальная. Задание скорости а в цифровом виде производится скачком с помощью устройства задания скорости ASV либо по линейному закону - с помощью дополнительного цифрового задатчика интенсивности разгона и торможения ZSV (на рис. 7.37 показан штриховой линией). Измерение действительной скорости двигателя ш осуществляется путем подсчета счетчиком AR числа импульсов, поступивших на его вход с выхода импульсного датчика скорости ZBR, сочлененного с валом двигателя М, за время Го = l/fo, задаваемое генератором эталонной частоты GU. Частота импульсов датчика скорости /д пропорцио- алгебраического суммировании с интервалом Го погрешности 8j в накапливающем сумматоре AW2 с последующим запоминанием результата в регистре RG3. Для получения дифференциальной составляющей в соответствии с первой обратной разностью Af (п) (см. разд. 9) с помощью сумматора А W3 из текущего значения погрешности 8(. алгебраически вычитается значение погрешности в предыдущем периоде Го, запоминаемое в регистре RG4. Результат вычитания фиксируетси в регистре RG5 также иа время Го- Все три составляющие закона регулирования скорости алгебраически суммируются сумматором AW4 я далее отрабатываютси аналоговой частью системы. Достоинством рассмотренной структуры ЦРС является простота ее реализации в виде программы работы ЦВМ. К недостаткам следует отнести повышенные требования к частотным свойствам элементов, особенно импульсного датчика, а также сложность автономной аппаратной реализации. Поэтому в последаем случае большее распространение получил другой - непрерывный частотно-фазовый способ выполнения ЦРС. Функциональная схема одного из возможных вариантов реализации таких регулЯ- торов скорости - цифро-аналогового пропорционально-интегрального регулятора скорости показана на рис. 7.38. Обведенная штрих-пунктнром часть схемы представляет собой аналоговую систему тнристорного управления скоростью электропривода с подчиненным регулированием тока. Задание требуемой скорости двигателя М в виде числа Na производится при помощи устройства задания скорости ASV. Число Лз подается иа вход преобразователя код-частота ZIf либо скачком, либо через цифровой задатчик иитеисивности ZSV. На другой вход этого преобразователя подаются импульсы генератора эталонной частоты QU с частотой / , а с выхода импульсы с частотой fs, пропорциональной числу задания скорости, поступают на вход преобразователя частота- напряжение flUl. С выхода последнего преобразователя в виде напряжения via вход аналогового блока сравнения AW выдается уставка скорости для аналоговой системы управления электроприводом. M -r- тз\Л \-\t/U2 Pbo. 7.38. Фуаканоиальиая схема непрерывного ЦРС. Для полуя (ия пропороноиальиой составляющей регулирующего воздействия система замкнута по скорости следуищим образом. С двигателем механически сочленен импульсный датчик скорости ZBV, частота импульсов на выходе которого пропорциональна действительной скорости двигателя (О. Выходнаи частотв датчика преобразуется вторым преобразюателем частота- напряжение fHJ2 в соответствующее действительной скорости двигателя напряжение и аналогичное напряжению обычного тахогенератора. Это иапряжеиие подается на второй вход аналогового блока сравнения (усилителя постоиииого тока АЩ, где алгебраически суммируется с напряжением уставки U, в результате чего после усиления иа выходе блока сравншвя получается напряжение, тфопорциоиальное рассогласованию по скорости в системе. Таким образом, пропор-вионадьиая составляиицая закона регулирования вычисляется в аналоговом виде с относн-тельво невысокой точностью. Для получения необходамой точности регулирования скорости в системе используется цифровой шиесрвхор tLUS. На вход цифрового интегратора подаются две асинхронные последовательности импульсов с частотами задания fa (от Z ) и действительной (от 2BV). Значение и полярность выходаого напряжения интегратора определяются интегралом разности входаых частот, т. е. разностью фаз входных последовательностей импульсов. Цифровой регулятор скорости, выполненный по данной схеме с применением устройств УБСР-Д, допускает регулирование скорости даигателя с точностью 0,1--0,01 %, диапазон регулирования до 100 : 1 н даскрет-иость уставки задания до 0,001. Структура и основные параметры рассматриваемого регулятора определяются общими принципами построения систем подчиненного регулирования [7.7,7.8] и требованиями объекта регулирования. Одаако в некоторых случаях целесообразно введение в аналоговой форме дифференциальной составляющей в закон регулирования скорости электропривода с целью компенсации собственных возмущений сигналов отдельных цифровых узлов регулятора, вызываемых наличием квантовании сигналов по уровню и во времени. Отруктуриая схема частотно-фазовой системы регулирования скорости прн анализе ее в режиме больших возмущений (ио в линейной области характеристик) может быть представлена в виде рис. 7.39, с, т. е. обычной даукратноинтегрирующей системы [7.20]. Она отличается от последней наличием дополнительного форсирующего звена на входе, действие которого в случае необходамости компенсируется подачей управляющего воздействия через задатчик интеисивиости нли цифровое апериодическое звено. Реакция таких систем иа возмущение по нагрузке, представляющая наибольший практический интерес, одинакова. Для настроенных на симметричный оптимум даукратноинтегрирующих систем {7.7, 7.10,7.16] форма кривой переходного процесса отработки скачкообразного возмущения по нагрузке Дш, = f (К)< построенной в относительных единицах, одинакова (рис. 7.39, б). В качестве относительных еданнц использу-вэтся: Дй), -; где Дш, и Дш - относительное и абсолютное отклонения скорости даигателя, рад/с; - статический момент иа валу даигателя, Н м; - приведенный к валу даигателя момент ниерции привода, кг-м*; Г, - постоянная времени интегрирования токового контура, с; , и - относительное и абсолютное время. Интегрирование этой кривой дает в,ре-зультате кривую = / (<,) изменения числа в счетчике интегратора в переходаом режиме, показанную иа рис. 7.39, б в относительных единицах: 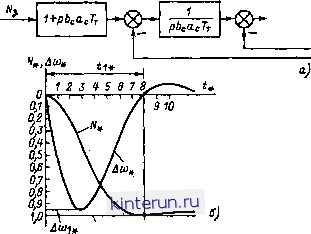
Абсолютное значение специфического для цифровых систем регулирования скорости настроечного параметра - требуемой числовой емкости интегратора в соответствии с данным рисунком определяется в момент окончания первой полуволны переходного процесса ti, в виде: в.тр = ent + 1: fcf 0,55AcDi, Мс-2Тт <1.7т (7.29) где А©х, - амплитуда первой полуволны относительного отклонения скорости; kf - коэффициент передачи импульсного датчика скорости. в случае отличной от симметричного оптимума настройки регулнтора скорости или необходимости учесть другие возмущения, кроме возмущения по нагрузке, зиачение N находится по соотнетствующей требуемое кривой отработки возмущения или алгебраической сумме возмущений. На базе рассмотренных цифро-аналоговых систем регулирования скорости индивидуальных электроприводов могут выполиятьси системы регулирования соотношения скоростей и группового управлення миогодвигатель-нымн электроприводами различных производственных механизмов. 7.6. УПРАВЛЕНИЕ СКОРОСТЬЮ И МОМЕНТОМ ДВИГАТЕЛЯ . ПРИ РЕГУЛИРОВАНИИ СКОРОСТИ ВО ВТОРОЙ ЗОНЕ (ИЗМЕНЕНИЕМ МАГНИТНОГО ПОТОКА) При ресулированин скорости ДПТ иеза-8ИСНМ0Г0 возбуждения во второй зоне изме-неннем магнитного потока обмотка возбуждения двигателя питается от управляемого пре- Рис. 7.39. Переходные процессы в частотно-фазовом цифровом регулвторе скорости ЦРС. а -i структурная схема ЦРС: б - графики переходного процесса в ЦРС. образователя. Наибольшее распространение получили статические тиристорные преобразователи с однофазнымя, трехфазными, мостовыми и нулевыми схемами выпрямления (см. § 3.2.1). При этом обмотка якоря двигателя может питаться от неуправляемого и управляемого преобразователей в зависимости от необходимости однозониого или двух-зоиного регулирования скорости (см. рис. 6.3). При регулировании скорости только во второй зоне за счет изменения магнитного потока н прн номинальном напряжении иа Якоре применяется электропривод, функциональная схема которого приведена на рнс. 7.40, а. Здесь обмотка якоря двигатели питается от неуправляемого выпрямители VM, а обмотка возбуждения LM - отуправлнемого преобразователя UL. Для повышения жесткости механических характеристик в электроприводе используется стабилизация скорости, осуществляемая отрицательной обратной связью по скорости двигателя, заведенной от тахогенератора BR на вход управляемого преобразователя UL цепи обмотки возбуждения LM н воздействующая на магнитный поток двигателя. Характеристика преоазователя в таком электроприводе имеет вид, приведенный на рис. 7.40, б. Это позволиет иметь номинальное напряжение возбуждении 1/в,ион в номинальный магнитный поток Фнон двигателя при отсутствии сигнала управлеиия преобразователем Uy и снижение С/д и Ф при возрастании Uy. Усилительные устройства AL я системы импульсно-фазового управлении тиристор-нымн преобразователями UL используются те же, что и в преобразователях, питающих обмотку якори двигателя в одиозоииых элек-тропринодах (см. § 3.2.1). При повышении нагрузки иа валу двигателя н сннжеияи напряжения иа якоре й скорости повышается напряжение управлевня преобразователем Му,в. это приводят к снижению напряжения иа обмотке возбуждшин и снижению магантного потока, <по и повышает скорость двигателя и жесткость механической характеристики. Пуск и торможение двигатели в таких электроприводах производится с помощью пусковых и тормозных резисторов и виде одно-или многоступенчатого пуска я обычно одноступенчатого динамического торможении.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


