
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода В этом случае передаточная функция регулятора Toita находится из выражения kr 1 откуда (7.24) Регулятор тока в этом случае оказывается интегральным (И-регулятор) с постояииой времени интегрирования такого же порядка, как при настройке иа технический оптимум. В режиме прерывистого тока вследствие размыкания цепи якоря при отсутствии тока обратная связь по напряжению оказывается включенной иа ЭДС двигателя. На рис. 7.33 это показано штриховой линией. Ввиду медленного изменения ЭДС двигателя по сравнению с напряжением преобразователя это соответствует размыканию обратиой связи. Пютому н режиме прерывистого тока ковтур тока включает н себя регулятор иапряження с коэффициентом передачи ие охваченный обратной связью, что приводит к соответствующему уменьшению постоянной интегрирования регулятора тока в ftp, раз. В режиме прерывистого тока передаточная функция якорной цепи вместе с преобразователем может быть записана как Rsi+PTv) где Rg - эквивалентное сопротивление якорной цепи, заиисящее от относительной длительности протекания тока и значительно пре-вышакнцее R,. В случае, если ставится требование сохранить динамические свойства привода в режиме прерывистого тока такими же, как в режиме непрерывного тока, коэффициент передачи ftp, g может быть найдеи из соотношения Ар gAnAt 1 Wp. x (Р) j, 1 prj 2рТ (14.ргу где VFo.t (Р) определяется соотношением (7.24). Тогда ft. Поскольку Rg - величина переменная, /jp,a выбирают, исходя нз среднего зиачеиия соотношения RJR и соображений устойчивости снстшы к субгармоническим колебаниям. Обычио Ар, н = 4 5. Ухудшение динамических свойств в режиме прерынистого тока выражается в значительном затягивании переходного процесса в зоне прерывистых токов из-за иеком- пенсируемого регулятором увеличении эквв валентного сопротивления якорной цепн. Для улучшения динамики используется адаптивный регулятор тока [7.17] с иелнией-яой характеристикой, обладакш1нй различными передаточными функциями в режиме прерывистого н непрерывного токсю. Для разделения зои рабсггы регулятора используется специальный датчик, реагирующий на прерывание тока. Как уже отмечалось, в режиме прервшв-стого тока якорная цепь с преобразсшатвлем может быть описана передаточной функцией Передаточная функция регулятора тока, обеспечияающего такую же динамику, какая задана в режиме непрерывного тока, находится из выражения к-р. т [Р) 1 2рГ (1 +рТ откуда следует: Регулятор тока должен быть кнтеграль* ным с перемеииой постоянной времеии, зависящей от зиачеиия R,. Поскольку связано со скважностью тока, была предложена ключевая схема, измеияющаи структуру с ПИ-регулятора на И-регулятор с частотой и скважностью, соответствующей скважности тока н прерыввспж режиме. В нелинейном регулятс тока [7.18] увеличение R, в области прерывистых тсжов компенсируется увеличением коэффициента усиления регулятора тока. Разделение зои рабош выполнено тем, что в режиме прерывистых токов напряжение преобразователя примерно ранио ЭДС двигателя. В этом регуляторе учитывается также нелинейность, вызванная прецварительвын смещением групп вентилей. Следует отметить, что перечисленные способы управлеиия н зоне прерывистых токов дают примерно одинаковый практвческнй результат. Электроприводы с подчнненнЕШ регулв-рсшаяием параметров выпускаются кшшлекг-но в виде тириспфных электроприводов поо-тояниого тока серии КТЭ (рие. 7.34). Эти электроприводы включают в себя двигателв постояииого тока и упр41вляемые тирнст(фнве преобразователи для питания пепев якоря н возбуждения. Электроприводы выпускаются одно- и двухдвигательными с о;шнм или двумя нерегулируемыми или регулируемыми нереверсивными и реверсивными преобразователями, с регуляторами напряжения или скорости, без регулирования и со ступенчатым или плавным зависимым регулированием ма! нитного потока. Электроприводы обеспечивают разгон двигателя с постоянншк ускоов- ннем, остановку с динамическим подтормажи-ванием в нереверсивных приводах н с рекуперативным торможением - в реверсивных. Все приводы работают в режиме статической и астатической стабилизации скорости двигателя при нзмеиеиин нагрузки и других ноз-мущакяцих факторов с автоматическим ограничением якорного тока двигателя. Системы управления электроприводов построены с подчиненным регулированием тока якоря двигатели с контурами скорости или напряжении и с подчиненным регулирова- Функциональная схема нереверсивного электропривода с регулятором напряжения приведена на рис. 7.34. Она представляет собой двухконтурную систему управления скоростью с регуляторами тока АЛ и напряжения AV и задатчиком интенсивности SJ. Снгиал задания напряження U, з подается на нход SJ, осуществляющего линейное нарастание ,3 что обеспечииает постояиное ускорение при разгоне двигателя. Далее Ин,з поступает иа А1, иа который могут подаваться еще сигналы от технологических 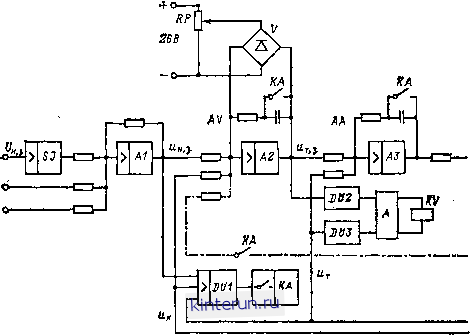 Рнс. 7.34. Функциональная схема ннем тока возбуждения двигатели с контурами скорости и ЭДС. Электроприводы с регуляторами напряжения выполняются с постоянным магнитным потоком л ибо с его ослаблением в одну ступень. Электроприводы с регуляторами скорости выполняютси с постоянным нли с плавно регулируемым магнитным потоком с помощью тнристорного иоз-будителя. Регулирование скорости двигателя осуществляется в диапазоне 1 : 10 и электроприводе с регулятором напряжения и 1 : 50 - с регулятором скорости. Время восстановления скорости при толчке нагрузки от нуля до номинальной составляет не более 2 с с ошибкой ие выше 0,2 % при применении прецизионного тахогенератора. Зависимая система управления полем двигателя обеспечивает кратность форсировки возбуждения в диапазоне (2-6) -.1.8 режиме токовой отсечки скорость изменяется от номинальной до нуля нри 10 % изменения тока якоря вьнпе его ишинального значении. регуляторов и сигналы задания исполнительного органа рабочей машины. Суммарный сигнал задания является задающим сигналом контура напряжения Ин,з и вместе с сигналом обратной сиязи подается на регулятор напряжения Л К, который иыполняетси либо пропорциональным типа П (реле КЛ включено), либо пропорционально-интегральным типа ПИ (реле КА отключено). В первом случае система регулирования напряжения и скорости является статической при возмущениях по нагрузке, а ио втором - астатической. Сигнал обратной свизи по напряжению и поступает с датчика наприжения UV, осуществляющего потенциальную развязку между силовой цепью якоря и цепью управления. Переменная составляющая сглаживается фильтром на выходе А5. Напряжение выхода AV является зада-кицим сигналом контура тока ,3, который вместе с сигналом обратной связи по току подается на ПИ регулятор тока. Напряженке обратной связи и поступает с датчика тока и А, имеющего потенциальную развязку с силовой цепью. Для повышения жесткости механических характеристик привода используется /й-ком-пенсация, заключающаяся в том, что на усилителе А5 формируется сигнал в виде разности напряжения на двигателе и падения напряжения на якоре. При полной ?-компен-сации регулятор напряжения работает как регулятор ЭДС двигателя. При превышении нагрузки выше допустимой ток двигателя Обширный класс систем регулирования скорости повышенной точности условно можно подразделить на группы по способу задания скорости, представлению обрабатываемых сигналов во времеии, линейности характеристик, закону регулирования, аппаратной реализации, технологическим особенностям и т. п. Однако эти системы, как правило, имеют общие черты: цифровой ввод задания; использование импульсных (частотных) датчиков в цепи обратной связи по скорости; формирование интегральной составляющей 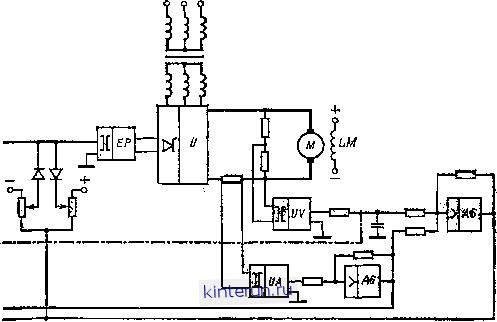 электропривода типа КТЭ. этраничивается значением сигнала задания Ur,3 за счет ограничения напряжения выхода регулятора напряжения, осуществляемого диодным мостом V с опорным напряжением. Ограничение устанавливается резистором RP. 7.5. СИСТЕМЫ ЦИФРО-АНАЛОГОВОГО РЕГУЛИРОВАНИЯ СКОРОСТИ (ЦРС) Системы ЦРС позволяют обеспечить высокие диапазоны регулирования при высокой статической точности, составлнющей 0,01-0,001 %, которую не обеспечивают электроприводы непрерывного действия. Однако применение цифровых устройств для управления электроприводами непрерывного (аналогового) действия приводит к ухудшению качества регулирования. Поэтому наибольшее распространение получили цифро-аналоговые системы управления электроприводами, сочетающие положительные свойства аналоговых и цифровых систем. в законе регулирования; аналоговый выход на силовую часть системы. Цифро-аналоговые системы строится по структуре подчиненного регулирования параметров, в которой основной (внешний) контур управления выполняется цифровым, а подчиненный (внутренний) - аналоговым. Цифровые устройства обеспечивают высокую точность регулирования и облегчают процесс настройки и работы благодаря точному измерению и индикации регулируемой величины - скорости. Аналоговые устройства являются выходными на исполнительную часть электропривода и обеспечивают хорошее качество переходных процессов. Поэтому основные различия в структурах ЦРС определяются аппаратной реализацией устройств, осуществляющих формирование пропорциональной, интегральной, дифференциальной составляющих закона регулирования и их комбинаций. Разделение систем регулирования и их отдельных узлов иа цифровые и аналоговые
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


