
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода где W (р) выбирается исходя из требований к динамике объекта регулирования; Wi (р) - искомая передаточная функция регулятора; в (Р) - передаточная функция внутреннего контура; Wg (р) - передаточная функция последнего звена объекта управления. Аналогично записывается передаточная функция промежуточного внутреннего контура. Передаточная функция последнего внутреннего контура записывается следующим образом: где W (р) - желаемая передаточная функция замкнутого внутреннего контура; (р)- передаточная функция первого звена объекта управления; Ws (р) - искомая передаточная функция регулятора. Из (7.10) я (7.11) следует: Wt(p) = WJp) . WaU))Wa(p)-W(p)Wa{p)WtW) W (p) Wi{p)-W U>)Wi[p) (7.12) (7.13) Для выбфа желаемой передаточной функцви был предложен так называемый технический оптимум (оптимум по модулю, 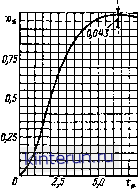 Рис 7.30. Кривая реакции системы, соответствующей техническому оптимуму, на единичный входной сигнал. Beitrage-optimum) [7.14, 7.15], соответствующий передаточной функции колебательного звена Это передаточная функция колебательного звена с коэффициентом демпфирования 1 2. При единичном входнсм сигнале выход ввеиа изменяется, как показано на рис. 7.30. Перерегулирование - 4,3 %, достижение первсяч) максимума через 4,6 Г, после начала процесса. Колебательное звено (7.14) образуется замыканием входа и выхода звена с передаточной функцией Wp (р) = 2рГ(1-ЬрТ) (7.15) Асимптотическая ЛАЧХ разомкнутой системы с передаточной функцией (7.15) приведена иа рис. 7.31, а. гОдБ/дек 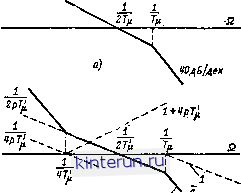 Ц0аБ1ак1 Рис. 7.31. Асимптотические логарифмические амплитудно-частотные характеристики разомкнутой системы, соответствующие техническому (а) и симметричному (б) оптимумам. При выборе желаемой передаточной фуикции замкнутой системы принимают равной некомпенсируемой малой постоянной времени объекта регулирования, которую невозможно компенсировать принципиально или нецелесообразно компенсировать из соображений помехоустойчивости системы. Колебательное звено (7.14) не обеспечивает астатизма системы. Поэтому в случаях, когда требуется точное воспроизведение задания в статике при наличии посторонних возмущений, например в системах стабилизации скорости электродвигателя, применяется дополнительный интегральный регулятор. При настройке на симметричный оптимум передаточная функция разомкнутого контура регулирования преобразуется к виду W(P)-- 1 + 4р7 4р7;-2р7(1+р7;) (7.16) Здесь через обозначена некомпенси-руемая малая постоянная времени для этого случая. Асимптотическая ЛАЧХ этого разомкнутого контура показана на рис. 7.31, б, сплошной линией. Штриховыми показаны составляющие частотной характеристике с соответствующими им передаточными функциями. Как видно из рис. 7.31, б, изломы частотной характернстикн расположены симметрично относительно частоты среза, откуда и произошло название симметричный оптимум. Системы, настроенные на симметричный оптимум, не имеют статической ошибки, однако в такой системе при единичном сигнале на входе перерегулирование достигает 55 %, что требует принятия дополнительных мер по формированию задающего сигнала. Оптимизацию системы с последовательной коррекцией начинают с внутреннего контура, последовательно переходя к внешним. При переходе к внешнему контуру передаточную функцию подчиненного контура упрощают, аппроксимируя контур звеном первого порядка, ошибка аппроксимации ие-существеииа [7.7]. Новую некомпеисируе-мую постоянную выбирают с учетом быстро- механической части пр - вода WU>)=. Здесь Гц - эквива- лентная постоянная времени, характеризующая тиристорный преобразователь с системой импульсио-фазового управления. Внутренний контур образован регулятором тока АА, тиристорным преобразователем и якорной цепью и замыкается обратной связью по току с коэффициентом передачи к. В большинстве случаев влиянием ЭДС Двигателя на работу внутреннего контура можно пренебречь ввиду относительно медленного изменения ЭДС по сравнению со скоростью изменения тока. При необходимости 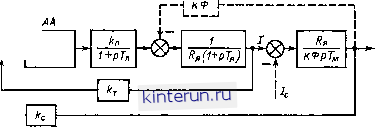 Рас. 7.32. Структурная схеиа тнрнсторного электропривода с внешним контуром скорости и вау- тренним контуром тока якори. действия виутреииего контура и датчиков обратной связи. Аналогичным образом поступают пр переходе к следукицему внешнему контуру. Так, при оптимизации структуры рис. 7.29 передаточная функция внутреннего контура, оптимизированного по техническому оптимуму, аппроксимируется передаточной функцией инерционного звеиа Wz. (р) = = 1/(1 + 2prJ. При переходе к следующему контуру не-ксшпеисируемая постоянная времени в случае, если ие принимается во внимание ииер-щаоиность датчиков и других факторов, берется равной 27pi и желаеман передаточная функция этого контура имеет вид: (Р) == 1+4гра4.872р2 Быстродействие каждого внешнего контура ие менее чем в 2 раза ниже быстродействия подчиненного ему внутреннего контура. Ограничение координат выполняется путем ограничения выходных сигналов внешних контуров. Структура тнристориого привода с внешним контуром скорости и внутренним контуром тока якоря при неизменном потоке возбуждения изображена иа рис. 7.32. \ Объект управления состоит из трех последовательно соединенных звеньев; тнристориого преобразователя -(p)=k /(l -\-рТ ); якорной цепи двигателя W (p) = сигнал компенсации влияния ЭДС подается на регулятор тока параллельно с сигналом обратной связи по току. В случае неучета влияния ЭДС передаточная функция разомкнутого контура тока запишется в виде x(P) = rp (p)-j.(7.17) Принимая величину ? равной некомпеи-сируемой постоянной времени Т приравниваем выражение (7.17) оптимальной передаточной функции разомкнутого контура (7.15) и определяем из получеиного равенства передаточную функцию регулятора тока АА. р. т Таким образом, контур тока оптимизируется пропорционально-интегральным регулятором (ПИ-регулятором). Разомкнутый контур скорости на рис. 7.32 включает а себя регулятор скорости AR, оптимизированный внутренний контур тока, интегрирующее звено объекта управлеиия, датчик скорости. Передаточная функция разомкнутого контура записывается в виде Wc (Р) = Гр /?.Ас (7.19) k,(l-i.2pT рТс-Здесь внутренний контур тока аппрок- симируется инерционным звеном о ной времеии 27,. постояв- Принимая некомпенсируемую постоянную времени равйой 2Т и оптимизируя контур согласно выражению (7.15), где Гц заменяем на Г, получаем равенство * = (1 +рТр) рТс 2рТ (1 +рТ1) откуда (7.20) т. е. пропорциональный (П-регулятор) регулятор скорости. Для двукратноинтегрирующей системы регулирования скорости, настроенной яа Однако имеется режим вентильного электропривода, вызывающий резкое изменение параметров, и удовлетворительное управление без специальных мер становится невозможным. Таким режимом является режим прерывистых токов. В режиме прерывистых токов резко увеличивается эквивалентное сопротивление цепи нагрузки. В пределе при приближении к нулю среднего тока эквивалентное сопротивление стремится к бесконечности. Среднее напряжение преобразователя в этом режиме практически не отличается от ЭДС двигателя и изменение угла регулирования в динамике приводит лишь к изменению среднего тока нагрузки, поскольку ЭДС двигателя изменяется сравнительно медленно. 1+ТиР 1+ТяР R(1T p) I-jn -и J*- Рис. 7.33. Структурная схема системы регулирования тока с внутренним контуром напряжения преобразователя. симметричный оптимум, выражение (7.19) приравнивается к выражению (7.16) прн Т - 27.. яАс откуда >-1гт(1 + 2рТрТ~ 4рг;,.2рг(И-рг;) (7.21) т. е. требуется ПИ-регулятор скорости. Пропорциональная составляющая совпадает с пропорциональной составляющей регулятора скорости системы, настроенной на технический оптимум. Передаточные функции внутреннего контура тока и контура тока, настроенного на технический оптимум, совпадают. Соотношения (7.17) - (7.21) справедливы прн неизменных параметрах объекта управления. На практике большинство этих параметров изменяется со временем илн в зависимости от режима работы привода: коэффициент усиления вентильного преобразователя зависит от угла регулирования; сопротивление якорной цепи изменяется в зависимости от нагрева якоря; индуктивность изменяется в зависимости от насыщения магнитной цепи. Следует отметить, что отклонения перечисленных параметрот достигают 50 % среднего вначеяия и от1Ь1онение от оптимальной настройки в этом случае незначительно. Проблема улучшения динамических свойств систем регулирования особенно обострилась в связи с распространением тнристорных преобразователей с раздельным управлением грулпамн вентилей, где реяшм прерывистых токов возникает при малых нагрузках и прн смене направления тока. Структура системы управления током якоря двигателя с улучшением динамики прн помощи внутреннего контура напряжения тнристорного преобразователя изображена на рис. 7.33 [7.16]. В представленном варианте обратная связь по напряжению (ЭДС преобразователя) выполняется с фильтром, постоянная времени которого равна постоянной времени якорной цепн. Регулятор напряжения - пропорциональный с коэффициентом передачи /, . В режиме непрерывного тока внутренний ксттур напряжения имеет передаточную функцию вида 1н(Р) = *р,н*п (1+рГ,) (1+*р,нАпАн)Х 14 р, нпи 1 ~\~ р, tJUH (7.22) Принимая Т ируем выр функцией вида аппро! 1+Ар.н*нАн симируем выражение (7.22) передаточной Унп (1+рГв) (7.23)
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


