
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода мости 7 и 2 на рис. 2.1, б) или сухого трения (зависимость 3). В последнем случае при изменении направления движения реактивный момент (сила) сухого трения скачком изменяет свой знак. 2.2. РАСЧЕТНЫЕ СХЕМЫ МЕХАНИЧЕСКОЙ ЧАСТИ ЭЛЕКТРОПРИВОДА Механическая часть элек: ропрнвода представляет собой, как правило, сложную электромеханическую систему, состоящую из инерционных тел - роторов (якорей) электро- собой части электропривода могут совершать движение с разными параметрами (с различными скоростями) либо движение различного вида, как, например, в подъемных установках с вращательным электродвигательным устройством исполнительный орган движется поступательно. На рис. 2.2 приведены характерные кинематические схемы ряда механизмов с электродвигателями вращательного движения. На этих схемах стрелками показаны направления движения отдельных звеньев кинемати ческнх цепей и действующих на них моментов или сил. В ограниченном числе случаев рабочий орган исполнительного механизма 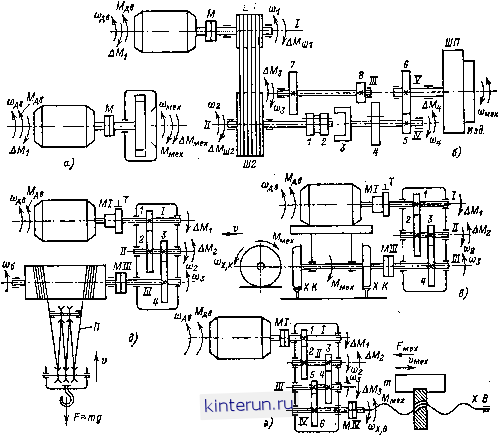 Рис. 2.2. Кинематические схемы электроприводов о вращательным движением исполнительного органа (а и 6) в случае безредукторного электропривода (а) и при наличии передач (6) и с поступательным двнжеинм исполнительного органа в случае механизма типа колесо г- опора (в), ходовой винт < гайка (г), барабан - канаты (д). двигателей вращательного движения, бегунов линейных двигателей, соединительных муфт, редукторов, различного рода шкивов, звездочек, барабанов, ходовых колес, подъемных сосудов, шпинделей, валков и т. п., связанных между собой упругими звеньями - канатами, цепями, ремнями, валопроводами и т. п.; при этом различные связанные между непосредственно связан с валом электродвигателя, как это показано, например на рис. 2.2, а. К таким механизмам относятся насосы, вентиляторы, электрошпиндели и др. В подавляющем же большинстве случаев электропривод содержит передаточное устройство, состоящее из устройств различного типа, как это показано, например, на рис. 2.2] Расчетные схемы механической части электропривода 2.2, б, где в кинематической схеме шпинделя металлорежущего станка используются клиноремениая передача и редуктор с переменным передаточным отношением (коробка передач). В механизмах, в которых исполнительный орган совершает поступательное движение, помимо редукторов используются устройства типа ходовое колесо - опора (рис. 2.2, в), ходовой винт - гайка (рис. 2.2, г), шестерня - зубчатая рейка, барабан - канат (рис. 2.2, д), канатоведущий шкив - канаты, звездочка - цепь и т. п. Для анализа механической части электропривода реальный механизм заменяют ди-намнчески эквивалентной, приведенной ..расчетной схемой, состоящей из дискретных (сосредоточенных) инерционных элементов, соединенных между собой упругими связями, и обладающей таким же энергетическим запасом, как и реальная система. Здесь под дискретным инерционным элементом понимается тело, обладающее свойствами инерции, податливостью которого можно пренебречь. Под упругой связью понимается упругое звено, массой которого можно пренебречь, т. е. имеются в виду так называемые невесомые упругие связи, характеризующиеся постоянным коэффициентом жесткости и линейной восстанавливающей силой. При деформации упругих звеньев имеет место рассеяние (диссипапия) механической энергии, обусловленное силами внутреннего трения, называемыми диссипативными силами, которые пропорциональны разности скоростей перемещения соседних дискретных масс. В приведенной расчетной схеме все инерционные элементы осуществляют один вид движения - либо вращательное, либо поступательное. При этом они располагаются на какой-нибудь одной упругой связи или, как принято говорить, приводятся к одной связи. Расчетные параметры можно приводить к любому заранее выбранному месту кинематической схемы механизма, к любому упругому ее элементу. Если приведение производится к какому-нибудь валу механизма, то получается расчетная приведенная схема вращательной системы, в которой все массы имеют общую геометрическую ось. В такой системе нагрузки характеризуются крутящими моментами М, инерционные элементы - моментами инерции /, упругие элементы - коэффициентами жесткости при кручении (крутильной жесткостью) ср. Если приведение производится к какому- либо поступательному движущему элементу (штанга, рейка, ходовой винт, канат, цепь и т. п.), то получается расчетная приведенная схема поступательного движения, в которой нагрузки характеризуются силами F, инерционные элементы - массами т, упругие элементы - коэффициентами жесткости при растяжении или сжатии (линейной жесткостью) Сд. Приведение дискретных инерционных элементов выполняется, исходя из равенства кинетических энергий приводимого и приведенного инерционного элементов; приведение коэффициентов жесткости - из условия равенства потенциальных энергий; приведение моментов и сил - из равенства соответствующих секундных работ, т. е. мощностей. Формулы приведения параметров А-го звена, совершающего вращательное движение, и q-TO звена, совершающего поступательное движение, сведены в табл. 2.1. Таблица 2.1. Приведение параметров в расчетной приведенной системе К вращательной К поступательной прА = <РА <Рпр9 = *<?/np9 npft = < пр<7= V%9 npft = ft np9 = Vnp9 hp* = ft/4 np9 = %np(? кр, npA = кр*/ кр. про = = лдпр* npft npft < ft npft ftnpft *npft = npS npft npft = ft/*np* л. npft - крл/пр* npft = k/npk В табл. 2.1 приняты обозначения: ij, - передаточное отношение передач, установленных между валом, к которому осуществляется приведение, и валом k-ro вращательного элемента; R pg - радиус приведения 9-го движущегося поступательно элемента к валу приведения. Для устройства, преобразующего вращательное движение в поступательное, типа колесо - опора, шестерня - рейка, звездочка - цепь, шкив - канат, барабан- канат Rnq = DI2iq; для ходового винта /?np = h/2ni, где D - диаметр обода колеса, шкива, барабана, делительной окружности шестерни, звездочки, м; h - шаг резьбы ходового винта, м; 1д - передаточное отношение передач между валом приведения и валом колеса, барабана, звездочки и т. п.; в случае наличия передач в устройстве, осуществляющем поступательное движение (например, полиспаста на рис. 2.2, 3), Rapg ~ = D /2igi , где tn - передаточное отношение полиспаста; ijnpft - радиус приведения k-ro вращательного элемента к поступательному движущемуся элементу (определяется аналогично Rnpq)- Приведение элементов механической системы осуществляется к тому звену кинематической цепи, закон движения которого представляет интерес в условиях решаемой задачи. В теории электропривода, как правило, рассматриваются расчетные схемы вращательного движения, приведенные к валу двигателя. При исследовании законов движения исполнительного органа в ряде случаев удобнее осуществлять приведение к валу исполнительного органа. В случае поступательного движения последнего рассматривается расчетная схема поступательного движения. На рис. 2.3, а - д изображены расчетные схемы вращательного движения, соответствующие кинематическим схемам, показанным на рис, 2.2. Кроме того, для рис. 2.2, д показана также расчетная схема по- ступательного движения (рис. 2.3, е). Инер- :ти и коэффициен-риведены к валу цнонности, нагрузки, скорости и коэффициен ты упругости на рис. 2.3 при двигателя. Как видно из п1киведеииых расчетных схем, механическая часть электропривода представляет собой сложную систему, состоящую из значительного числа дискретных 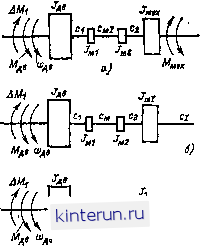 Таг ность упрощения Э1шивалентных расчет-ных схем путем уменьшения числа дне- кретных инерционных элементов и упругих связей. Во всякой механической системе можно выделить характерные парциальные звенья двух типов: рис. 2.4, а - дискретный инерционный элемент с двусторонними упругими
ci gCmI cg ppj сд ppj СД. j-j c mr J Jmi j, J-3 gj Jit JmM   Jg Js сг m д JTL nf n ir Frp-gmrp Рис. 2.3. Расчетные вращательные схемы (а - д) механической части электроприводов по рис. 2.i и поступательная схема (е) для рис. 2.2, д. инерционных элементов (/ или т), соединенных упругими невесомыми связями - соответственно Скр или Сд. Исследование динамики таких систем затруднительно и не всегда ращюнально, так как даиамические свойсша механической части электропривода определяются главным образом низшими частотами; В связи с этим имеется возмож- связями; рис. 2.4, 6 - два дискретных инерционных элемента с общей упругой связьр. Схема замены звена типа а на звеио тип б показана На рис. 2.4, а и соответственно звена типа 6 иа звено типа а - на рис, 2.4, 6. Для того чтобы вставленное пар-циальное звено оказывало на механическую систему такое же динамическое воздействие.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


