
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода § 7.31 Система стабилизации при питании от источника тока по нагрузке следует учитывать синтез корректирующих устройств при управляющих воздействиях, которые часто являются противоположными. Поэтому в этих случаях принимают компр( 1иссиые решения. - 7.3. СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА И СКОРОСТИ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА ПРИ ПИТАНИИ ОТ ИСТОЧНИКА ТОКА Стабилизация момента и тока двигателя постоянного тока осуществляется также в электроприводах с источником тока. 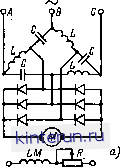 -ф-ф-ф}. Рис. 7.26. Принципиальная схема (а) и механические характеристики (б) электропривода постоянного тока с индуктивно-емкостным преобразователем, обеспечивающим регулнрованне момента двигателя. Наибольшее распространение в электроприводе получили трехфазные иидуктивио-емкостиые преобразователи (ИЕП), являющиеся источником тока [7.7) Они используются для питания ДПТ. Схема такого преобразователя приведена иа рис. 7.26, а. Эта схема при определенном выборе параметров обеспечивает стабилизацию тока якоря в широких пределах изменения противо-ЭДС двигателя. Индуктивности и емкости, включенные в треугольник, образуют трехфазный источник тока с выходом иа переменном токе, а трехфазный мостовой выпрямитель V позволяет подключить к источнику тока обмотку якоря двигателя постоянного тока. Приицип действия ИЕП основан иа явлении резонанса напряжений в цепи L, С, ток в которой при равных сопротивлениях индуктивности Xi и емкости Х(. ие зависит от сопротивления нагрузки, а определяется линейным напряжением питающей сети и сопротивлением х = = Хг = Хг где Of., 6i - напряжения на емкости и индуктивности. В схеме иа рис. 7.26, а при неизменном токе в якоре момент даигателя пропорцио- нален магнитному потоку -кяф. Поэтому управление изменением значения момента электропривода осуществляется изменением тока возбуждения даигателя и соответственно изменением его магнитного потока. При этом регулирование тока возбуждения может обеспечиваться резистором R, включенным в цепь обмотки возбуждения двигателя. Механические характеристики при различных зиачеииях магнитного потока и его изменениях от - Фноы До + Фиоы приведены иа рис. 7.26, б. Электропривод по системе ИЕП - Д обеспечивает плавное и точное регулирование момента в пределах от -маоы ДО +Л1ноы с точностью стабилизации тока в нагрузке до 2-3%. Коэффициент мощности ИЕП - Д близок к единице, а КПД составляет 0,96-0,98. Недостатком электропривода по системе ИЕП - Д ивляется отсутствие возможности рекуперации энергии в сеть из-за использования в нем неуправляемого выпрямителя. Массо-габаритные показатели ИЕП оказываются хуже тиристориых преобразователей напряжения. Электропривод постояииого тока с ИЕП может использоватьси и для стабилизации скорости. Это производится с отрицательной обратиой связью по скоростя. Функциональная схема такого электропривода приведена на рис. 7.27, а. Управление осуществляется по цепи возбуждения даигателя. Обмотка возбуждения двигателя питается от преобразователя или от промежуточного усилителя А. Система электропривода является статической по возмущающему воздействию по JLUL Рис. 7.27. Функциональная схема (а) и Мехаин- ческне характернстикн (б) электропривода постоянного тока с нндуктнвно-емкоствым преобразователем, обеспечивающего регулнрованне скорости двигателя. нагрузке. Механическая характеристика описывается следующим уравиеиием: ® fee Kkc где U3 - задающее напряжение, определяющее задание скорости; К = klhky - коэффициент передачи разомкнутой системы по моменту; fej = /fe; k - конструктивная постоянная двигателя; kg = Ф/1 -коэффициент передачи двигателя иа прямолинейнсш дгчастке его характеристики намагничивания; ky = IJUy - коэффициент передачи промежуточного усилителя. Регулирование скорости проиотодится изменением задающего напряжения фис. 7.27, 6). Диапазон регулирования скорости достигает значения 10 : 1. Статизм характеристики оярчделяегся коэффициентами передачи двигателя, усилителя и коэффициентом обратной связи по скорости. В такой системе он составляет 10-15%. Статизм может быть снижен теоретически до нуля при введении дополиительиой положительной связи по току возбуждения двигателя, как показано иа рис. 7.27, а штриховой линией. Механическая характеристика при этом описывается уравнением Щ Al(l-fetfty) Kg где fe, = Uo,c.ilh - коэффициент положительной обратной связи по току возбуждения; Vo,t.r - напряжение обратной связи по току. Статизм характеристики при этом зависит также от коэффициента обратной связи по току, и при к, = 1/Ау статизм становитси теоретически равным нулю. Практически при введении положительной обратной связи удается получить статизм около 5 %. При насыщении двигателя нли достижении ограничения выходного сигнала промежуточного усилителя в зависимости от того, что наступает раньше, магаитиый поток двигателя оказывается постоянным при любой скорости и привод обеспечивает постоянство Момента двигателя, равного А1ст=К/я, о Фнас (1.2 -Ы.З) M o , гАе /i.HOHt Л<нож - номинальные значения тока и момента даигателя; Фиае - максимальное значение магнитного потока при насыщении даигателя или ограничении усилителя. Из-за нелинейности характеристик насыщения двигателя или промежуточного усилителя механические характистики привода оказываются нелинейными, как показано на рис. 7.27, б штриховыми линиями. Изменение значения момента стабилизации может производиться перестройкой уровня ограничения выходного сигнала промежуточного усилителя или введением отсечки в отрицательную обратную связь по скорости. Функциональная схема электропривода с отрицательной обратной связью по скорости с отсечкой приведена на рис. 7.28, а. В кач ггве промежуточного усилителя используется магнитный усилитель с обмотками управления ЫА и L2A. На LtA подается разность задающего напряжения по скорости {/а, с и напряжения обратной связи по скорости с отсечкой {/с, о- Отсечка осуществляется диодом V. На 1,.2А подается задающее напряжение по моменту {/з,м. определяющее значение момента стопорения М Механические характеристики такогоэлектро-1фивода приведены на рис. 7.28, б. На участке стабилизации скорости при о > Шоте = = Ua,Jkc характеристика описывается уравнением ®--] Kkc Статизм характеристик в этом случае, так же как и при непрерывной связи по скорости, определяется 341ачениями коэффициентов К я kc- 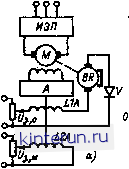
Рис. 7.28. Функциональная схема (а) и неханв-ческне характеристики (б) электропривода постоянного тока с индуктивно-емкостным преобра-вователем, обеспечнваюнгего регулирование скорости и момента двигателя. На участках стабилизации момеита даигателя при Q) < (Воте механическая характеристика описывается уравнением Переходные процессы в системе ИЕП-Д при безынерционном промежуточном усилителе иа линейных участках кривой намагничивания даигателя и характеристики усилителя при действии отрицательной обратной связи по скорости (см. рис. 7.27, а) описываются дифференциальным уравнением t/a.c *с 4-Ale где Та - La/Ra - постоянная аременн цепи oiSMOTKH возбуждения; Lb, Ra - индуктивность и активное сопротивление цепи обмотки возбуждения; Т = J/Kk - электромеханическая постоянная времени электро-прииода. Переходные процессы привода определяются процессами, протекающими в обмотке возбуясдения даигателя, и из-за ее большой ииерционности быстродействие электропривода не может быть высоким. Характер переходных процессов при управляющих и возмущающих воздействиях зависит от соотношения постоянных времени и и может быть апериодическим (при Т >4 Гд) н колебательным (при Т < 4Т). При введении положительной обратной связи по току возбуждеипя даигателя (см. § 7.fl \- \ Сжсежы 1юдчиненного реаулщювакая рис. 7.28, а) дифференциальное уравнение систешл прни1ает внд: t/3.c .-LTr JCfccL dt Как видно, положительная связь по току возбуждения двигателя снижает коэффициент при первой производной скорости, что повышает колебательность переходных процессов и в большей степени, чем выше значения коэффициентов Ау и kf Дифференциальное уравнение электропривода но виду сходно с дифференциальным уравнением системы УВП-Д при питании обмотки якоря двигателя от безынерционного преобразсшателя напряжения, но в случае системы ИЕП-Д вместо входит Гв. Поэтому анализ переходных процессов может проводиться согласно методам, приведенным в разд. 9. Достоинством электропривода с ИЕП является его простота, а недостатками - плохие массо-габаритные показатели, особенно при больших мощностях двигателя, и низкое быстродействие. Поэтому такие электроприводы целесообразно использовать в механизмах небольшой мощности с относительно высокими инерционными массами и не требующих высокого быстродействия. 7.4. системы подчиненного регулирования параметров электропривода В настоящее время в электрэтрнводе прн создании систем регулировании нашел широкое применение принцип последовательной коррекции или так называемого подчиненного регулирования [7.7-7.И]. Сущность его заключается в следующем. Объект регулирования представляется в виде последовательно соединенных звеньев, выходными параметрами иоторых являются существенные координаты объекта, например ток, напряжение, ЭДС, магнитный поток, момент, скорость, положение. Для управлеиия каждой из этих координат организуется отдельный регулятсф, образующий с объектом контур, замкнутый соответствующей обратной связью. Регуляторы соединяются последовательно, так что выход одного является входом другого. При этом замкнутые контуры регулирования образуют систему, в которой имеется внутренний контур управления, состоящий из регулятора и одного из звеньев объекта управления, первый внешний контур, включающий в себя внутренний контур и следующее звено объекта управлеиия, второй внешний контур, включающий в себя первый и следукицее звеио объекта управлеиия и т. д. Выходн(й сигнал каждого внешнего контура является задающим для последующего, заключенного внутри него контура. Таким образом, каждый внутренний контур регулирования нодчинен соответствующему bjh нему. Указанное иллюстрируется рнс. 7.29, на котором внешний контур образован регу-лятсфом / и звеном объекта управления 6, подчиненный ему внутренний контур образован регулятором 2 и звеном объекта управления. 5 н последний, подчиненный внутренний контур образован регулятором 3 и звенеш объекта управления 4. В некоторых случаях объект управлеиия обладает более сложной структурой, чем показано на рис 7.29. Имеются внутренние и перекрестные связи, и принцип последовательные коррекции неприменим в чистом виде. В этих ситуациях на регуляторы подаются компеисирукидиё сигналы, принцип распространяется на отдельные части объекта управления нли производятся структурные преобразования и регулируется некоторая обобщенная координата, являкяцаяся функцией координат объекта. Рис. 7.29. Структура системы подчииеавого регулировании. 1-3 - регуляторы; 4-5 - авеиья объекта управлевня. Преимущества подчянегаюго регулирования по сравнению с параллельной коррекцией закякпаклся в упрсщенин решения задачи ограничения косфдннат, облегчении наладки и, следовательно, сокращении сроков пуска объектов, в широких возможностях унификации узлов управления различньшн объектами. Недостаток - некоторый проигрыш по быстродействию, связанный с носледователь-ным воздействием иа систему через инутреннне контуры, а не сразу на входное звеио объекта управлеиия. В большинстве случаев конкретного применения в электроприводе указанный недостаток несуществен, а перечисленные вьппе преимущества имеют решающее зиачение. Обычно объект регулирования описывается математически н разбивается иа звенья с известньпш передаточными функциями. В большинстве случаев известна желаемая передаточная функция замкнутой н разомкнутой систем регулирования. Она выбирается, исходя нз требований к динамике объекта регулирования. Принцип подчиненного регулироваввя значительно облегчает поиск передаточных функций регуляторов и реализацию желаемого управлеиия. Согласно структуре рис. 7.29 передаточная функции замкнутой системы регулирования [7.12, 7.13] записывается следующим образом: U7 - i (Р) (Р) У (?0 ifl.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


