
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода где /отс - ток отсечки, при котором начинает действовать отрицательная обратная связь по току; 1 (А/) = 1 (/ - /отс) - единичная функция по току, равная иулю при / < /отс 6 единице при / > /отс. Электромеханические характеристики в системах с токовой отсечкой и с отрицательными обратными связями по скорости и напряжению имеют следующий вид: [С/з + £/о,т-1(А/)1*уМд-
Характеристика имеет два участка (рис. 7.16,5): стабилизации скорости [1(Д/)=в при / < /отс1 и стабилизации момента §1 (Д/) = 1 при / > Регулирование тока отсечки производится изменением опорного напряжения C/q.t- Уровень стабилизации тока (момента двигателя при действии отрицательной связи по току может быть оценен по уравиеиию ЭДС преобразователя, записанного для случая стопорения двигателя (ю = (Q: £п.сг=11/з-*т(/ст-/о1с)] *уАн=/ст . откуда /ст - /отс = где /ст - ток якоря при стопоренни двигателя. В режиме стабилизации момента отрицательная обратнаи связь по току и отрицательная обратная связь по скорости или напряжению, осуществляющая стабилизацию скорости, противодейстиуют друг другу. Связь по току снижает скорость двигателя, а связь по скорости (напряжению) старается ее повысить. Поэтому в этом режиме связь по скорости (напряжению) отключают путем введения в эту связь узлов отсечки, что повышает эффективность действия токовой отсечки и улучшает переходные процессы, обеспечивай постоянство ускорения и замедления привода. Стабилизация ускорения осуществляется с помощью стабилизации момента в переходном процессе иа всем его протяжении. Это обеспечивается в системе управления электроприводом с отрицательными обратными связями по току и скорости (или напряжению) с отсечками. Эти связи позволяют сформировать требуемый закон изменения сигнала управления иа входе преобразователя (см. рис. 6.9). Если нанести иа требуемые законы характер изменения сигнала управлеиия в системах с обратной отрицательной связью по скорости или напряжению, как показано иа рнс. 7.17, а и б, то видно, что в начале процессов пуска и торможения иа входе системы оказывается лишняя форсировка и ее иужио снять (горизонтальная штриховка), а в конце пуска и торможения нужно повысить форси-ровку (вертикальная штриховка). Такие за- коиы управлеиия обеспечиваются в систолах электропривода с отсечками по скорости или напряжению и току. Процессы пуска и торможения происходят иа всем протяжении t В) 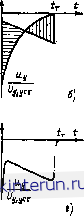 Рис. 7.17. Сигналы управления системой электропривода прн пуске н торможении: несформнро-ваиные (а, б) и сформированные (в, г). переходного процесса при постоянстве тока даигателя. В конце процесса форсировка снимается связью по скорости или напряжению. При этом напряжение управлеиия во времени изменяется по уравнению где ©иач - начальная скорость процесса; (dfa/df)3 - заданное ускорение двигателя. Реальные кривые переходаых процессов в системах, обеспечивающих требуемые законы Uy (О, близки к идеальным (см. рис. 7.17, в, г). Возникающая в начале процесса щ)атковремеииая форсировка, ие учтенная в требуемом законе Uy (О, необходима для быстрейшего нарастания тока якоря даигателя. Функциональная схема системы электропривода с отрицательными обратными связями по скорости и току с отсечками приведена на рис. 7.18, а. Отсечку по току осуществляет стабилитрон VI, так как уровень стабилизации тока (момента) может быть выбран одиозиачио, исходя из его допустимого или требуемого зиачеиия. Отсечку по скорости обеспечивает диод V2, когда опорное напряжение (поскорости) меньше напряжения датчика обратной связи (£/o,c< c) При этом напряжение обратной связи определяется следующим образом: Ис,о = (Ис-£/о,с)1 (А<в) = = *с(<В-<Вотс)1 (Дш). где ©отс - скорость отсечки, при которой начинает действовать обратная связь по скорости; 1 (Д©) = 1 (© - ©отс) - единич- иая функция па скорости, равная нулю при (О < (Оотс и единице при б> > ©отс- Уравнение электромеханической характеристики при этом имеет следующий вид: 1+*с-1(Д<В)*уМд Выбор значений тока отсечки loe. и скорости отсечки ©отс т. е. значений единичных функций, может производиты:я при их точном соответствии, как показано на рис. 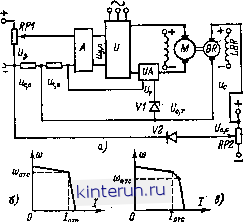 Рве. 7 18. Функциональная схема (а) и электромеханические характеристики (б. а) я электропривода с отрицательными обратными связями по скорости и току с отсечками. 7.18,6. Однако практически значение скорости отсечки принимается при скорости ниже полного соответствия, т. е. при / > /qtc, как показано иа рис. 7.18, в. Это позволиет упростить настройку системы и исключить снижение кюмеита перегрузки двигателя при снижении напряжения сети. Задающее иапряжеиие в системе электропривода с отрицательной обратной связью по скорости (напряжению) с отсечкой определяется при идеальном холостом ходе двигателя, когда 1 (Дш) = 1, а 1 (Д/) = 0. Тогда +*с*уМ )-£о.с. Снижение задающего напряжения в системе с отсечкой по скорости иа Uo.z позволяет облегчить действие токовой отсечки. Регулирование скорости в такой системе электропривода изменением задающего напряжения Оа обеспечиваться ие может, так как при снижении скорости ниже скорости отсечки (ш< Шотс) обратная связь по скорости отключается. Поэтому скорость регулируется измеиеиием значения опорного напряжения С/о. о изменяющего скорость отсечки Шотс- Это является недостатком этой системы управления. В переходных процессах отрицательные обратные связи по току и скорости с отсечками позволяют сформировать закон изменения сигнала управления иа входе преобразователя при пуске двигателя с постоянным ускорением и торможении с постоянным замедлением (см. рис. 7.17, в, г). Исследования таких систем в динамике можио проводить классическими или частотными методами по структурной схеме, при-ведеииой иа рис. 7.14, 6, ио в которой опорные напряжения по скорости и току вынесены иа вход системы. Передаточная функция системы и; (Р) Wy (р) IFn (р) W (р) l + Wy(p)W (p)lFj(p)X х1Юс(Р)-МД<в) + т(Р)-1(АЛ1 где UI (р) = иа (Р) +£/ (р)-1 (Дш) + + f/o, т (Р) 1 (Д/). Передаточные фуикции в зависимости от значений 1 (Д/) н 1 (Дш) определяются отдельно для режимов стабилизации тока (момента) .{1 (Д/) =1, 1 (Дш) = 0J и скорости [1 (Д/) = О, 1 (Дш) = 1]. Отсечки по току и скорости (напряжению) могут осуществляться при использовании нелинейных характеристик двух промеясу-точных усилителей. Функциональная схема такой системы приведена на рис. 7.19, а. 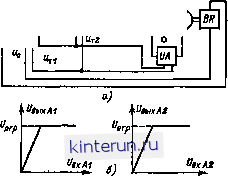 Рис. 7.19. функциональная схема электропривода с непрерывными обратными связями по скорости U току с отсечками, осуществляющимися иелинейиой характеристикой промежуточного усилителя. На рис. 7.19, б показаны характеристики усилителей А1 и А2 с ограничением выходного сигнала. На вход усилителя А1 заводится задающий сигнал U3, отрицательная обратная связь по скорости (нли по напряжению) и положительная связь по току и. На вход А2 подается сигнал управлеиия от усилителя А1 и отрицательная обратная связь по току Ыт . В установившихся режимах, когда усилители А1 и А2 работают на линейных участ- ках своих характеристик, уравнение элеетро-механическоЙ характеристики имеет вцд: 1+*с*у1*уя*п*д где йу1, fey. - коэфАициенты усиления усилителей А/ и А2; kfi, - козффициеиты положительной и отрицательной обратных связей по току. Система настраивается таким образом, чтобы *те = i*yi- Тогда действие отрипа- записаниого теля: режиме стопореиия двига- и OTpkyfkji Отсечка по скорости (напряжению) может обеспечиваться путем ограничения сигнала управления иа входе преобразователя. При этом напряжение обратной свизи по скорости или напряжению складывается электрически с задающим напряжением и их выходная цепь, являющаяся входом усилителя, шунтируется стабилитроном или диодом. Функциональная схема такой системы электропривода приведена иа рис. 7.20, а. 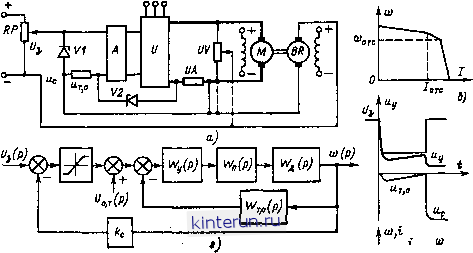 Рве. 7.20. Функцвовальвая схема (а), характервствка (б), переходвве процессы (а) и структурная схема (г) свстемы электропривода с ограничением сигнала управлення и токовой отсечкой. тельиой обратной связи по току исключается положительной связью и происходит стабилизация скорости двигателя при действии отрицательной обратной связи по скорости (или напряжению). При повышении нагрузки до /отс и снижении скорости усилитель А1 При действии обоих связей насыщается и дальнейшее действие связей, отрицательной ПО скорости и положительной по току, исключается. В этом случае остается обратная отрицательная связь по току, которая и осуществляет стабилизацию тока (момента) двигателя. Уравнение электромеханической характеристики при этом имеет следующий вид: о = iorpfey А*д - ?*д (1 -Ь *тЙу *п/Л). где £/огр - напряжение ограничэния иа выходе усилителя А1. Уровень стабилизации тока определяется коэффициентом отрицательной обратной связи по току, зиачение кототого можно определить вз уравиенвя ЗДС В большинстве электроприводов ограничение сигнала управлеиия используется для защиты входных цепей промежуточного усилителя А от перенапряжений. Выбор напряжения стабилизации стабилитрона (диода) VI производится из условия пропускании сигнала управлеиия, обеспечивающего стабилизацию скорости при заданных значениях скорости и тока. Такое ограничение ири действии токовой отсечки отключает связь по скорости (или непряжеиию) и обеспетавает иа входе системы сигнал управления, знача-тельио меньший уровня задающего яапрке-иия. Это позволяет снизить сигявл отрицательной связи по току, коэффициент которой в этом случае выбирается из условия U -Uy, / у-. ст - 0 где и - напряжение стабилнзацяи стабв-литрова или диода, соответствующее напряжен шо ограничения напряжения управления.
|
|||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


