
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода с электрическим, но тормоз может срабатывать, например, после окончания динамического торможения или с выдержкой времени. При этом питание обмотки электромагнита гВ в период динамического торможения осуществляется контактором торможения КМ4 (рис. 7.П,е). Часто электромагинты тормозов включаются с форсировкой, осуществляемой допол-. нительиым контактором КМ6 (рис. 7.U ,д). Отключается этот контактор токовым реле КА, которое включается при включении электромагнита тормоза YB. Настраивается реле КА иа срабатывание при токе, равном номинальному току холодной обмотки электромагнита тормоза YB при ПВ = 25 % [6.5]. Реле времеии КТ используется для обеспечения наложения механического тормоза при остановке двигателя. При торможении ДПТ со скорости выше основной, соответствующей ослабленному маг-иитиому потоку, управление моментом при усилении магиитиого потока осуществляется с контролем тока. Контроль тока обеспечивает токовое реле КА, осуществляющее релейную обратную связь по току якоря, как это осуществлялось при ослаблении магиитиого потока (см. рис. 7.5). При динамическом торможении используется узел схемы, приведенный иа рис. 7.12, а, а при торможении KMt кШ кмг 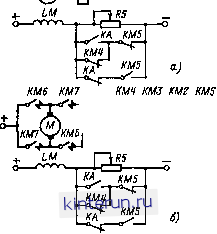 Рис. 7.12. Узлы схем динамического торможения (а) и противовключения (б) с усилением- магнитного потока ДПТ тока с управлением с контролен тока. пр(71;нвовключеиием - узел, прииедеииый на рис. 7.12, б. В схемах применены три ступени пучкового резистора (Ri - R3) и три, контактора ускорения (КМ2 - КМ, одна ступень данамического торможения и противовключения R4 и одни контактор торможения (противовключения) КМ5. Усиление магнитного потока осуществляется размыкаюпщм контактом токового реле К А, цепь через который создается при включении контактора торможения КМ5, а цепь замыкающего контакта КА, служащего для ослабления магнитного потока при пуске, при этом разрывается размыкающим вспомогательным контактом контактора КМ5. Реле КА в начале торможения замыкается от броска тормозного тока, а затем при спадании тока размыкается и усиливает магнитный поток, что приводит к возрастанию тока, иключеиию реле КА и ослаблению магиитиого потока. За несколько переключений реле магнитный поток усиливается до номинального значения. Далее в схемах будет происходить динамическое торможение (рис. 7.12, а) и противовключеиием (рис. 7.12, б) в соотиетствии с характеристиками, определяемыми резисторами R4 и R1- R4. Реле КА настраивается так, чтобы его токи переключения были выше минимального значении тормозного тока, что важно при торможении противовключеиием. 7.2. замкнутые системы стабилизации скорости и момента электропривода постоянного тока с промежуточным (суммирующим) усилителем Широкое, распространение в электроприводах постоянного тока получила статическая система непрерывного действия стабилизации скорости даигателя постояииого тока при изменении нагрузки на его валу, обеспечивающая регулирование скорости и ее стабилизацию с высокой точностью в статических и динамических режимах. Функциональная схема такой снстеш приведена на рис. 7.13. Она включает в себя дангатель М, 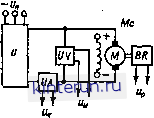 Рис. 7.13. Функдноиальвая схема адектроаря-вода постоявяого тока. преобразователь U, промежуточный усилитель А, измерительный элемент AW (сумматор) и обратную связь. В качестве преобразователей в таких системах электропривода используются генераторы постоянного тока, электромашниные и магнитные усилители и полупроводниковые (транзисторные и тиристорные) управляемые выпрямители. В качестве промежуточных усилителей в электроприводах использузотся электро- Таблица 7.1. Значения коаффицвеитов характеристических уравнений разомкнутых а замкнутых САУ Преобразователь Коэффициент днфферен цнального уравнения Вид системы и обратные связи Разомкнутая Замкнутая по скорости, отрицательная по яаприженню. отрицательная по току положительная отрицательная Безынерционный +*c*yV, о с сь о S: с Инерционный пя-и пя-. n+h + Vynj! нд (п + я)-. Т +Т 1+Му*п*, n+- (4-Wn~*) ц-я-и (п+Ми машинные, магнитные, транзисторные и интегральные усилители. В системах электропривода применяются три основные жесткие обратные связи: по скорости, напряжению и току двигателя, а также их различные комбинации. Для стабилизации скорости двигателя принимаются отрицательные связи по скорости и напряжению и положительная связь по току. Для стабилизации момента двигателя применяется отрицательная связь по току и положительные связи по скорости и напряжению. Работа электропривода в установившихся и переходных режимах при инерционном преобразователе и постоянном магнитном потоке даигателя описывается следующей системой дифференциальных уравнений: , Hyfty = ityn; e =-j-+iR + L; . , / da где Us, Ыо.с. Иу, Hyn-напряжения: задающее, обратной связи, управления системы, управления преобразователем; е - ЭДС преобразователя; © - угловая скорость двигателя; М, i, Мс, /с - момент и ток двигателя, момент и ток статической нагрузки; k, - коэффициенты усиления промежуточного усилителя и преобразователя; k= \1Ш> - коэффициент передачи двигателя по скорости; с = МП - коэффициент даигателя по моменту; Т - постоянная времеии преобразователя, которая в общем виде может быть функцией его напряжения управления Та (Иу); R, L - суммарные сопротивление и инадгктивиость силовой якорной цепи преобразователь - дангатель, включающие сопротивления и индуктивности двигателя (/?д, 1д), преобразователя {R , L) и другизэле-ментов якорной цепи; J - момент ин1рции электропривода с учетом моментов инерции двигателя Уд и механизма /иех.пр. приведенного к валу двигателя (/ = /, + /иех. пр)-Сигналы обратных связей в режиме стабилизации скорости, осуществляемые датчиками скорости BR, напряжения UV и тока UA, которые обычио принимаются безынерционными, соответственно равны: при связи по скорости Не = kcio; прн связи по напряжению Иц = Ид; при связи по току Иг = ki, где kc, ka, - коэффициенты обратных связей по скорости, напряжению и току; Нд - напряжение на якоре двигателя; i - ток якоря двигателя; © - скорость двигателя. В качестве датчиков обратных связей по скорости, напряжению и току в системах электропривода используются тахогенераторы постоянного или перемеииого тока, делители напряжения и шуиты или трансфор- маторы тока с выпрямителями соответственно (см. разд. 3). Общее дифференциальное уравнение электропривода может быть получено решением системы дифференциальных уравнений и уравнений обратных связей. Оно имеет следующий вид: d8(o икукакц dt dt Rk f a Mc + l+iknR-kr)-- Mc}. Правая часть дафференциальиого уравнения записана условно при действии всех связей. При использовании конкретных связей в уравнении следует оставить только их коэффициенты. Значения коэффициентов дифференциального уравнения Оз, Oj, Oi, Оо для каждой связи отдельно приведены в табл. 7.1, в которой приняты дополнительные обозначения: Tj, = L/R - электромагнитная постоянная времени якорной цепи даигателя; Т = = JR/c - электромеханическая постоянная времени электропривода при Ф = const; Тя.д = /-д ?д - электромагнитная постоянная времени двигателя. Дифференциальное уравнение системы электропривода может быть получено по передаточной функции системы. Общая структурная схема системы электропривода при условном действии всех связей приведена иа рис. 7.14, д. Из такой схемы может быть получена схема для любой связи отдельно, оставлением только иужиой связи. Общая передаточная функция системы электропривода определяется по свернутой структурной схеме, приведенной на рис. 7.14, б, в которой момент статической нагрузки перенесен на вход системы, а обратные связи по току - на ее выход. В такой схеме общее воздействие на электропривод равно: 1;(р)=с/з(р)-л1,(Р) 7д,(р). где £/з - управляющее воздействие; Мс - возмущающее воздействие; Wf/ (р) - передаточная функция звеиа, приводящего Мс ко входу системы, равное при действии условно всех связей ГпР+1 R kykn с /?л *т + kn-(l+T,--- Существуют также возмущения, определяемые изменением напряжения питающей сети и температуры окружающей среды, и различные помехи, учитываемые особо.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


