
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода коллектором. Память осуществляется также с помоп1ью/?5-триггеров,созданных на элементах ИЛИ-Н Е (например, И-108),с управлением единицей (рис. 6.23, в) вли на элементах И-НЕ(иапример, И-103)с управлением нулем К1 и -1 О.) 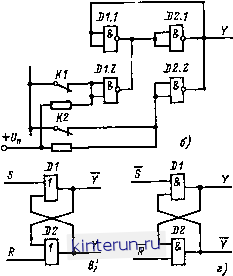 Рве. 6.23. Узлы схем памяти иа логических элементах. (рис. 6.23, г), ivEie /7, S - входные сигналы, а К - выходной. Для осуществления выдержек времени используются элементы выдержки времени, например И-301 или (Т-303), которые обеспе- 41- - 6) Рис. 6.24. Узлы схем. обеспечивающие выдержку времена. чивают задержку выходного сигнала относительно входного. Элемент И-301 обеспечивает выдержку времени от 0,61 до 1 с на включение и отключение элемента. Для получения больших выдержек времени применяются различные схемы, одна из которых приведена на рис. 6.24, а. Здесь два эленюнта времени D2 и D3 поочередно переключают триггер D1, создавая генератор импульсов. Отсчет TpeiSyeMoro количества импульсов нроизво-SVn счетчик D4. Небольшая задержка по вре- мени, порядка микросекунд, может обеспечиваться функциональным элементом с конденсатором иа входе. Такие узлы задержек используются в схемах дця борьбы с помехами и включаются иа вход схемы. Например, в схеме памяти рис. 6.24, б элемент D3 при подаче входного сигнала X обеспечивает сигнал запрета (1) на входе элемента D2 и с выдержкой времени (порядка 5 мс) его снимает, разрешая появление выходного сигнала Y. Таким образом, сигнал помехи длительностью менее 5 мс узлом памяти ие запоминается. Счетные схемы обеспечивают счет импульсов, идущих от генераторов. Генераторы импульсов создаются иа логических элементах с использованием конденсаторов, емкость которых определяет длительность импульса. 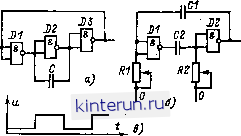 Рис. 6.25. Схемы генераторов импульсов. На рис. 6.25 приведены схемы генераторов импульсов с элементами И-103, обеспечивающие прямоугольные импульсы (рис 6.25, в), следующие с постоянной частотой и скважностью (рис. 6.25, а) и с переменной частотой и скважностью (рис 6.25, б). Здесь длительность импульсов задается емкостями конденсаторов С1 и С2 в регулируется резистором R2, а скважность регулируется резистором R1. Счет импульсов обеспечивается счетчиками, построенными на триггерах. В схемах с элементами серии Логика И для счетчиков используется элемент И-111, представляющий собой JK-триггер, имеющий четыре входа: J и К - счетные, С - тактовый и S - асинхронный для установки логичеекой единицы. На базе JK-триггеров создаются нереверсивные двоичные счетчики обычно для счета до восьми в двоичном коде. При больших счетах и при использовании двояч-ио-десятичного кода в схемах используется двоично-десятичный счетчик (элемент И-114). Схемы счетчиков различны и приведены в 16.7]. Для управлеиия перемещением нюхаяна-мов применяются контактные и бесконтавт-иые датчики положения (путевые и конечные выключатели) и вращающиеся контактные и бесконтактные командоаппараты. В функциональной части схем используются контактные аппараты (см. рис. 6.27) и бесконтактные логические элементы. На рис. 6.26 приведена логическая схема управлгани дряяениен механизма иа одни сшиг . Схема составлена на элементах сернн Логика Иэ. Команда на начало движения подается ключом управления SM. Память обеспечивается триггером D1, включение двигателя, обеспечивающего движение, осуществляется сигналом выхода Y прн бесконтактном управлении двигателем нлн контактором КМ. В исходном положении прн замкнутом контакте SMO на выходе триггера D1 устанавливается состояние /, 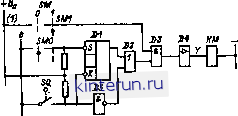 Рве. 6.26. Логическая схема управлении движением иа одни шаг. сохраняющееся прн замыкании SM1 и включенном контакте командоаппарата SQ. Прн этом имеется сигнал Y на выходе и включен контактор КМ. Движение прекращается прн размыкании контакта SQ, когда подается сигнал 1 на вход R триггера D1 н он, изменяя свое состояние, через элементы D5 и D2 снимает сигнал выхода Y н отключает контактор КМ. При управлении возвратно-поступательным движением используются также конечные выключатели и командоаппараты. На рис. 6.27 приведен узел схемы с конечными 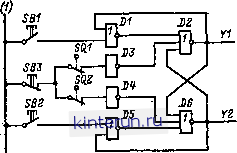 Рис. 6.27. Логическая схема управления воаврат-ио-поступательным движением с коиечньши выключателями. выключателями и памятью, собранной на апементах ИЛИ-НЕ. Движение выполняется электроприводом по командам Y1 Вперед и Y2Назад, осуществляющими реверс двигателя. Начало движения обеспечивается . в любом направлении кнопками управления SB1 (Вперед) н SB2 (Назад). Ограничение двяжеиня осуществляют конечные выключатели SQ1 и SQ2. В любом положении механизма даиженне может быть прекращено кнопкой SB3 (Стоп). Прн использовании комаидоаппаратов могут строиться различные схемы. Одна из них приведена на рнс. 6.28. Она обеспечивает движение механизма в направлениях Вперед и Назад и остановку в конце обратного движения. Такой цикл задает командоаппарат SQ. Схема выполнена на элементах серии Логика Иэ. Команда на включение двигателя в направлении *Вперед подается кратковременным замыканием контакта К (сигнал 0). Прн этом иа выходе триггера D2 появляется сигнал 1 (К/), который может использоваться в бесконтактной системе управлення 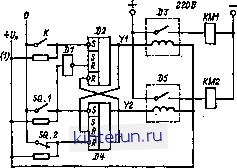 Рис. 6.28. Логическая схеиа управлення возвратно-поступательным движением с комаидоаппара-том. двигателем или через элемент D3 типа И-403 включать контактор КМ1, включающий и отключающий двигатель. Сигнал 1 (Yl) подается также на вспомогательный вход R триггера D4 в переключает его в состояние 0. В крайнем положении движения Вперед замыкается кш1такт SQ.1 командоаппарата и подает сигнал О на вход S триггера D4 и через элемент D1 - сигнал / на вспомогательный вход R триггера D2. При этом на выходе триггера D2 появляется О и сигнал Y1 снимается (контактор КМ1 отключается), а на выходе триггера D4 появляется сигнал 1 (Y2), который через элемент D5 включает контактор КМ2. В конце обратного движения размыкается контакт SQ. 2 командоаппарата и отключает контактор КМ2 (сигналы О на входе R триггера D4 и его выходе). Схемы на бесконтактных логических элементах позволяют обеспечивать все требуемые электрические блокировки, примение-мые в схемах автоматического управления, например от появления сразу нескольких сигналов выходов (в реверсивных схемах, в схемах пуска и торможения двигателей и др.) и многочисленные технологические блокировки. Одна нз таких блокировок имеется в схемах, приведенных на рис. 6.27 и 6.28. Она запрещает одновременную подачу двух сигналов выхода в реверсивных схемах. Для этого сигнал одного выхода при его появлении подается на вход запрета уэла памяти другого выхода и запрещает появление его сигнала. В схеме рис. 6.27 сигнал выхода Y1 (Вперед) подается на вход элемента D6, отключает память, если она существовала, и запрещает появление сигнала Y2 (Назад). Также сигнал Y2 (Назад) подается на вход элемента D2 и запрещает появление сигнала Y1. То же обеспечивается и в схеме рис. 6.28. Сигнал Y1 с выхода триггера D2 подается иа вспомогательный вход R триггера D4, снимая сигнал Y2 с его выхода, и, наоборот, сигнал Y2 с выхода триггера D4 подается иа вход R триггера D2 и снимает сигнал YJ с его выхода. Разработка схем управления с бесконтактными логическими элементами может производиться различными методами: по ре-лейно-контактной схеме; на основе таблиц переходов и карт Карно; на основе циклограмм с применением операторов алгебры состояний н событий, с использованием ЭВМ [6.6]. Релейно-контактные схемы используются при модернизации схемы промышленной установки и переводе ее на бесконтактные элементы. Такая релейно-контактная схема работавшей установки, составленнаи в свое время иа основании интуиции проектировщика, прошла своеобразное испытание при работе и содержит всю необходимую информацию о работе установки по обеспечению технологического процесса, командам управляющих устройств и датчиков, сигнализации, защите и т. п. При проектировании новых бесконтактных схем не следует интуитивно составлять релейно-контактный вариант схемы, который при сложной схеме не гарантирует оптимального решения и не исключает ошибок. В этом случае рекомендуется использовать инженерные методы формализованной записи условий работы технологической установки н логический синтез схемы. При небольшом числе входных переменных применяется метод синтеза с использованием таблиц переходов н карт Карно. Для разработки схем управления механизмов циклического действия предпочтение отдают использованию циклограмм. При большом числе переменных в схеме, изменяющихся во времени, применяют метод синтеза с использованием операторов алгебры состояний и собьггнй. Использование ЭВМ при проектнрованнн схем позволяет значительно сократить затраты времени, особенно при необходимости анализа нескольких вариантов, с целью выбора оптимального решения с точки зрения экономичности, быстродействия, минимума количества логических операций н количества элементов прн реализации схемы, повышения надежности работы схемы. Реализация схем н быстрая перестройка алгоритмов легко осуществляются при применении универсальных логических устройств. Одним из таких устройств является унифицированная логическая система управления промышленными механизмами УПМ-2, разработанная во ВНИИэлектропркводе н выпускаемаи Александрийским электромеханическим заводом [6.9]. Эта система предназначена для решения логических задач при автоматизации электропривода промышленных механизмов. Она выполняет логические операции н позволяет собирать бесконтактные схемы управления. Система воспринимает входные сигналы от контактных и бесконтактных командных устройств и датчиков н выдает выходные сигналы, воздействующие на исполнительные органы. Взаимосвязь между входными и выходными сигналами реализуется с помощью матрицы. Необходимые логите-скне связи осуществляются установкой диодных и безднодных ключей в гнезда матрицы по определенной программе управления, размеченной иа перфокарте. Смена программы осуществляетси перестановкой ключей и сменой перфокарт и выходных ячеек. Конструктивно система УПМ-2 выполнена нз четырех секций в виде блоков, устанавливаемых в кассету. В гнезда секций вставляются входные и выходные элементы, выполненные в виде втычных печатных плат с разъемом. На лицевой стороне секции размещены поле набора программы-матрицы и лампы сигнализации входов, выходов и перегорания предохранителей. Кассеты устанавливаютси в шкафы двустороннего обслуживания иа пять н семь кассет. Количество используемых секций позволяет получить нужную емкость устройства в зависимости от требуемого количества входов и выходов логической системы. В состав системы УПМ-2 входят четыре секции, одна нз которых основная. Она имеет десять входов н восемь выходов. Вторая секция имеет десять входов, а третья - восемь выходов. В тетвертой секции расположена дополнительная матрица для расширения поля набора программы. В качестве выходных ячеек применяются усилители: слаботочный, релейный, одно- и двухцепные транзисторные постоянного тока, приставки времени, счета импульсов, памяти, согласования напряжения на входе, аккумуляторная и трнггерная, счетные устройства и две заглушки. Система воспринимает входные сигналы переменного и постоянного токов напряжением 12, 24, 110 и 220 В и мощностью I и 2,5 Вт. Питание 380 В, 50 Гц. Эта система будет заменена комплектным устройством в виде логических матриц [6.8], которое представляет собой набор универсальных модулей, выполненных на печатных платах размером 233,4 X 160 мм, устанавливаемых в унифицированные кассеты типов БУК-МЭК н БУК-Ь. В состав набора входят модули: логические матричного типа, времен-нйе, согласующие с гальванической развязкой н функциональные. Устройства выполнены на интегральных микросхемах серии К-5П. Модули имеют 32 входа и 16 выходов. Они воспринимают входные сигналы напряжением 24 В (ПО В) постоинного тока и обес-печивают выходные сигналы напряжением 24 и ПО В при токе нагрузки соответственно 220 и 30 мА. Эти логические матричшле комплектные устройства выпускаются серийно с 1981 г. на Калининском заводе электроаппаратуры.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


