
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода ние на динамический момент, момента инерции электропривода и их отклонений от средних значений. Стабильность позиционирования определяется вероятностным хараром процессов, имеющих место в электроприводе, датчиках и системе управления. Она дает представление об их свойствах при эксплуатации позиционного электропривода с точки зрения точности работы системы по отработке одного и того же перемещения. Это связано с тем, что позиционный электропривод находится под воздействием возмущений, являющихся случайными функциями. Основными возмущениями являются случайные изменения статического момента нагрузки электропривода н вносимые им случайные изменения параметров кинематических цепей, передающих устройств электропривода и связей датчиков с исполнительным органом или электроприводом. Сюда же относятся случайные изменения моментов инерции, зависящие от загрузки механизма и перемещаемых масс рабочей машины. Случайные изменения момента нагрузки \ определяют и случайные изменения скорости \электропривода, которая также определяется случайным характероч изменений параметров электропривода, определяемых колебаниями напряжения питающей сети, задающего воздействия, сигналов обратных связей, колебаниями времен срабатывания электроаппаратуры, колебаниями различных внутренних возмущений, действующих на разные устройства электропривода. Многочисленность влияющих факторов и сложность их взаимосвязей между собой делает невозможным учет всех конкретных физических причин, определяющих их возникновение. Поэтому учет всех факторов производится в соответствии с положениями теории случайных процессов и теории вероятностей. Производительность процесса позиционирования также требует учета статистических данных. Она может быть оценена по среднему времени цикла позиционирования для партии изделий, определяемому как математическое ожидание случайной величины времени цикла позиционирования где f (О - функция плотности вероятности для ци1па позиционирования. Эта функция определяется как 1 2о} fit)- где - среднее время цикяа; о - дисперсия распределения времени цикла. Производительность электропривода определяется также максимальным быстродействием электроприводов в динамических режимах при пуске и особенно пря остановке с торможением. Экономичность позиционных электроприводов зависит от правильного выбора всех его устройств и тесно связана с проблемой определения оптимальных законов движения исполнительного органа рабочей машины из начальной позиции в конечную и формирования оптимальных законов изменения скорости электропривода, которые обеспечивают минимум динамических нагрузок и потерь энергии. Определение оптимального закона движения может производиться нахождением экстремума функционала за время цикла позиционирования Т [6.10] Я + /<: R + Ы где О) - скорость двигателя; <в = ---ус-ас корение двигателя; J - момент инерции электропривода; /с - ток статической нагрузки; с - постоянная двигателя; R - полное сопротивление якорной цепи двигателя; X - коэффициент Лагранжа. Решение этого уравнения методом Эйлера-Лагранжа при начальных условиях 0) (0) = О и 0) (Г) = О позволяет найти оптимальные законы движения н изменения тока двигателя: й)=6фо(</Г2-2/Г ); ш = 690(1/7-2-2/7-3); = (бфо4) 0/T-2t/T>) + I где Фо - угол поворота вала двигателя за время позиционирования. 6.4. ЗАЩИТА, БЛОКИРОВКИ И СИГНАЛИЗАЦИЯ, ПРИМЕНЯЕМЫЕ В СХЕМАХ ЭЛЕКТРОПРИВОДОВ 6.4.1. Защита электрических двигателей и схем управлеиия ими При нарушениях нормального режима работы электропривода для исключения выхода из строя электрооборудования и повышения надежности работы схемы в них применяется электрическая защита. Защита электроприводов с двигателями иапряжением до 1000 В выполняется простой и дешевой, так как сами двигатели с системами управления стоят недорого и применение сложных и дорогих защит для них экономически не 01фав-дывается. В схемах электроприводов применяются следующие виды защит: нулевая, максимально- и минимально-токовые, тепловая и специальные. Нулевая защита обеспечивает защиту от самозапуска двигателей при чрезмерном снижении или кратковременном исчезновении напряжения питающей сети. Защита осуществляется линейными контакторами (рис. 6.10) и автоматическими выключателями (рис. 6.11). В схемах с линейными контакторами при питании силовых схем и схем управления от одной питающей сети с управлением от кнопок контроль напряжения осуществляет сам контактор (рис. 6.10, а), а с управлением от командоконтроллера-реле защиты -lie 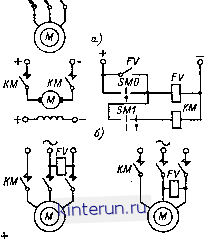 FV ХМ Рнс. 6.10. Узлы схем нулевой защиты двигателей переменного н постоянного тока с помощью линейных контакторов (а) и реле напряжения (б-г). В электроприводах механизмов, которые при аварии можно остановить без ущерба производственного цикла, нулевая защита всегда действует на отключение двигателя и остановку механизма. В электроприводах ответственных механизмов, длительная остановка которых может привести к большому ущербу для производства нлн к остановке всего производства прн неопасных нарушениях нормальных режимов работы, например при кратковременном снижении нлн исчезновении напряжения, защита не отключает двигатель, а осуществляет его самозапуск. Втаких схемах вместо кнопок управления применяются выключатели. Максимально-токовая заищта обеспе-чинает защиту двигателей, преобразователей и элементов схем управления от коротких замыканий. Она осуществляется плавкими предохранителями, максимально-токовыми реле и а зтоматнческимн выключателями (рнс. 6.12). При аварийных режимах максн-  ш к схеме управления 6) в) Рнс. 6.12. Узлы схем максимально-токовой защиты двигателей переменного (а) и постоянного (б) тока, а также цепей схемы управлеиия (в), осуществляемой плавкими предохранителями. по напряжению FV (рис. 6.10,6-г). Прн питании силовых схем н схем управления от разных источников контроль напряжения питания двигателей осуществляет реле защиты по напряжению, нключенное н силовую цепь (рис. 6.10, в, г). Г Т ? 11 Рис. 6.11. Узлы схем нулевой защиты двигателей переменного (а) н постоянного (б) тока с помощью автоматического выключателя QF с мнннмальяым расцепителем. В схемах с автоматическими выключателями QF (рнс. 6.11, а, б) контроль напряжения осуществляют нулевые расцепнтеля автоматов (расцепнтели минимального напряжения), отключающие автомат при снижении напряжения ниже напряжения уставки расце-питеяя. мально-токовая защита отключает потребитель от сети. Плавкие предохранители FU включаются в каясдую фазу питающей сетн между контактами линейного контактора и выключателя напряжения сети (рис. 6.12, о, б), чтобы замену вставки производить в обесточенной цепн. Выбор плавкой вставки производится по току вставки / .в. принимаемому по отношению к пусковому току двигателя ! . Для двигателей с короткозамкиутым ротором ток плавкой вставки определяется: при нормальном пуске с временем пуска, меньшим 5 с, /п.в = /п/2.5; при тяжелом пуске с временем, превышающим 5 с, /п.в = /п/(1.6-Ь2). Для АД с фазным ротором и ДПТ, у которых обычно /п = 2/ ом,дв. выбор плавкой встанкн производится по отношению к номинальному току двигателя/цом.дв п. в = (11125)/-ном. дв- Для защиты потребителей схемы управления электроприводами ток плавкой вставки выбирается из условия где - суммарный ток катушек максимального количества одновременно включенных аппаратов в схеме управления. В качестве максимально-токовых реле FA используются реле типов РЭ570 и РЭ70. Обмотки реле включаются в две фазы (два по- 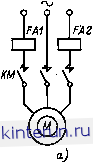 FA1 ] но (рнс. 6.15, а, в) или через трансформаторы тока ТА (рис. 6.15, б), если ток двигателя превышает номинальный ток реле. Зашита действует иа отключение двигателя от питающей сети (рис. 6.15, г, д) и при последующем включении требует вмешательства оператора, так как реле выполняются с защелкой. Выбор нагревательного элемента электротеплового реле производится по номинальной мощности двигателя Риом. дв или по току нагревательного Рнс. 6.13. Узли схем максимально-токовой защиты двигателей перемеииого (а) и постоинного (б) тока, осуществлиеиой реле иаксниального тока с воздействием на линейный контактор (в) и реле напряжения (г). 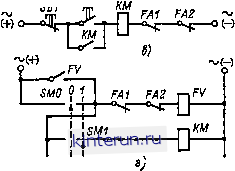 люса) питающей сети (рис. 6.13, а, б), а контакты - в цепь катушки линейного контактора (рис. 6.13, в) или в цепь реле напряжения rV (рис. 6.13, г). В качестве автоматических выключателей принимаются одно-, двух- и трехполюсные выключатели (рис. 6.14, а-в) типов АП50, АК-63. А3100  1> да Y г л Ксхеме CW)1 . + Ш - управления ---- Рис. 6.14. Узлы схем максимально-токовой защиты двигателей переменного (а) и постоинного (б) тока и схемы управления (в), осуществляемой автоматическими выключателями с максимально-токовым расцепителем. и др. (см. разд. 3). Токи уставок реле и максимально-токовых расцепителей автоматических выключателей выбираютси: для АД с короткозамкнутым ротором /у = (1,2 -s-1,3) In, для АД с фазным ротором и ДПТ /уст = (2 2,5) /ном.дв; дни схем уиравле- уст= 2 у2- Тепловая защита обеспечивает защиту двигателей от перегрузки. Она осуществляется элекгротепловыми, максимально-токовыми реле и автоматическими выключателями с тепловым расцепителем. Электротепловые репе FP включаются в дае фазы непосредствен- элемента /н,в, зависящему от номинального тока даигателя и температуры т окружаю-шей среды /и,в=/иом.дв/>1,6-0,17т. В повторио-кратковремеииых режимах работыэлектропривода, когда характеристики нагрева реле и даигатели различны, защита 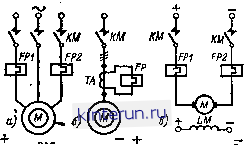 Рис. 6.15. Узлы схем тепловой защиты двигателей переменного (а, б) н постоянного (в) тока, осуществляемой тепловыми реле FR с воздействием на линейный контактор (г) и реле напряжения (д). дангателей от перегрузки осуществляется с помощью максимальио-токовых реле FA1, FA2 (рис. 6.13, а, б). Токи уставок реле при-нимаютси в зависимости от допустимой перегрузки даигателя по отношению к номинальному току даигателя /jwt = (1.2-M.3)/bom, .
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


