
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Быстродействие ограничивается допустимыми ускорениями исполнительного органа, ускорениями и ударами, определяемыми механической прочностью передающих устройств и параметрами электрических двигателей, их перегрузочной способностью и допустимой скоростью нарастания тока по условиям коммутации иа коллекторе. Плавность протекания переходного процесса оценивается в зависимости от характера кривой переходного процесса. В электроприводах наибольшее распространение получили колебательные процессы, обеспечивающие быстродействие. Колебательный процесс оценивается перерегулированием и числом колебаний. Перерегулирование а (Дояьж) показывает максимальное отклонение регулируемой величины в переходном процессе от ее установившегося зиачеиия. Оно может определяться по значениям переменных и по их приращениям и обычно выражается в процентах 6) - 6) а=. У . 100 = уст До), 100, где Штлг. <iimax - максимальные значения скорости и ее приращении в переходном процессе; Шуст, Дшут - устаноинвшиеси значения скорости и ее приращения. Также оценивается перерегулирование любой другой переменной, например момента двигатели при ударном приложении нагрузки Мс 100= ДЛ1 ,-ДА!, где Мтах> ДЛто* - максимальные значения момента и его приращения в переходном процессе; М, ДМ - момент статической нагрузки и его приращение при иабросе нагрузки. Допустимое перерегулирование скорости, момента (тока) в электроприводах определяется требоваииямитехиологичес ко го процесса, обеспечиваемого исполиительиым органом рабочей машины. Для большинства рабочих мапши оно обычно ие превышает 18-30 %. Иногда перерегулирование должно совсем отсутствовать или ие превышать 5-8 %. Может быть ограничено также максимальное значение регулируемой величины, например момента (тока) двигателя постоиииого тока, определяемого удовлетворительными условиями коммутации. Поэтому ограничиваются также напряжшие преобразователя и скорость двигателя. Число колебаний регулируемой величины в течшие времени переходного процесса (показатель колебательности) обычно принимается ие выше трех. Это число определяется выбором коэффициеита демпфирования (затухания) I для дифференциального уравнения колебательного звева (ДПТ НВ) с учетом параметров преобразователя нанрижевия где 5 - коэффициент демпфирования системы электропривода; Qq - ее частота собственных (недемпфированных) колебаний; х,Ху - переменная и ее установившееся значение, в качестве которой может быть скорость о), момент М, ток i двигатели или их приращения Дш, ДМ, At. Качество переходных процессов может быть различным в зависимости от требований технологического процесса рабочей машины. Для электроприводов, работающих с.большой частотой включений, требуетси обеспечить максимальное быстродействие, что обеспечивается стабилизацией момента двигателя в переходном процессе. Для многих электроприводов требуется обеспечить постоянство ускорения при пуске и постоянство замедления при торможении, т. е. da/dt = const, а иногда нужно ограничить рывок da/d = const. Рнс. 6.8. Оптимальные зависимости скорости и тока Прн пуске и торможении двигателя. Если, например, электропривод должен отработать заданный угловой путь в режиме пуск -торможение за минимально возможное время tp, то теоретически при Л4е = О оитн-мальиым будет параболический закон изменения скорости, т. е. линейный закон имаене-ния скорости фис. 6.8, штриховая кривая) при условии предельного использования двигателя по нагреву. Однако замена таких оптимальных графиков прямоугольным графиком момента и линейным графиком скорости, изменяющейся при постоянных ускорениях и замедлениях электропривода, позволяет получить практически близкие результаты. Следовательно, управляющее устройство электропривода должно сформировать закон управления, обеспечивающий постоянство ускорения и замедления. При безынерционном преобразователе этот закон находится, если пренебречь изменением тока двигателя в переходном процеесе и считать его постоянным, из дифференциального уравнения, описывающего переходный процесс пуска и торможении двигателя где Ну - суммарный сигнал управлеиия иа входе преобразователя. Знаки -{- и - § 6.3] Принципы позиционирования электроприводов принимаются соответственно при процессах пуска и торможения. С учетом того, что для установившегося режима справедливо уст. получим уравнение требуемого закона изменения суммарного сигнала управления системой, обеспечивающего постоянство ускорения и замедления двигателя прн пуске и торможении: где а  - коэффициент, опре- деляемый допустимым ускорением и замедлением двигателя. Требуемые законы изменения Иу пря пуске и торможении двигателя приведены на рис/6.9. Прн пуске (рнс. 6.9, а) в первый мо-мт времени ( = О я ш = 0) на вход системы 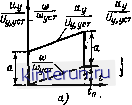 Рис. 6.9. Оптимальные законы управления преобразованием, обеспечивающие постоянство ускорения при пуске (а) и торможении (б). должен быть подан сигнал, равный а. В конце процесса разбега (при t = п) сигнал управления, равный 1 + а, должен быть снижен до установившегося значения (Ку/(/у,уст = 1). При торможении (рис. 6.9,6) прн = О и ш = й),ст на входе системы электропривода относительный сигнал управления должен быть равен 1 - д. В конце торможения при t= it имеющийся сигнал --а должен быть снят. Такой же закон управления можно получить и в системе Г-Д, если считать, что процесс в основном определяется постоянной времени возбуждення генератора [6.2]. Чтобы получить линейное изменение скорости в переходном процессе при постоянном токе двигателя, обычно достаточно обеспечить линейное нарастание ЭДС преобразователя. Поэтому при инерционном преобразователе следует обеспечить заданный темп нзменення ЭДС преобразователя, соответствующий требуемому ускорению или замедлению двигателя. При этом закон изменения ЭДС преобразователя, отнесенной к ЭДС в установившемся режиме, остается тем же, что и по скорости: ± а. Во времени напряженне управления при этом изменяется по уравнению Иу = уп L t+Тж где п. нач - начальное значение ЭДС преобразователя; - заданный темп изменетня ЭДС преобразователя. 6.3. нрииципы позиционирования электроприводов при автоматизации промышленных установок широкое распространение нашло управление движением исполнительного органа рабочей машины с контролем пути (положения), когда управляющие команды на включение я отключение двигателя подаются прн достижении исполнительным органом машины определенного положения. Контроль пути яе используется при управлении контакторами ускорения прн пусках и торможениях двигателя, так как путь, проходимый механизмом, пря этом очень мал. Управляющая команда от конечного илн путевого выклюадтеля используется для начала пуска или торможения двигателя прн его остановке или реверсяро-ванни, а также для изменения скорости двигателя, связанной с технологическим режимом работы механизма. Автоматическое управление положением осуществляется двух видов: 1) дискретное позиционирование электропривода в заданных точках пути по дискретным сигналам путевых датчиков; 2) непрерывное автоматическое управление положением по отклонеияю для осуществления дозированных перемещений илн по заданной программе. Независимо от способа управления электропривод обеспечивает: задание позиции или значения перемещения; контроль перемещения в позиции; точный останов в заданной позиции. Задание позиции может осуществляться дискретно или непрерывно. Контроль перемещения определяется требуемой точностью останова в заданной позиции и производительностью рабочей машины, зависящей от скорости перехода в заданную позицию. В зависимости от вида управления контроль позиции осуществляется дискретно или непрерывно с использованием датчиков положения или перемещения. Прн дискретном позиционировании применяются датчики положения. Они фиксируют заданное конечное положение дискретно при достижении исполнительным органом заданной позиции. Контроль промежуточных положений не осуществляется. В этом случае в заданной позиции электродвигатель автоматически отключается и останавливается обычно с наложением механического тормоза. Задачей электропривода является точная остановка исполнительного органа рабочей машины в заданной позиции.Такой вид управления примшяегсн ври июькокой точности позиционирования с редко перевалаживаемым циклом перемещении. При непрерывном управлении положением используются датчики перемещения, осуществляющие контроль положения исполнительного органа непрерывно. Они выдают информацию о положении исполнительного органа иа протяжении всего пути в непрерывной (аналоговой) или в дискретной (цифровой) форме. Такой вид управления преимущественно используется в системах,позиционирования высокой точности с часто переналаживаемым циклом перемещений. В качестве датчиков положения широкое распространение получили контактные путевые и конечные выключатели (см. разд. 3) с точностью срабатывания по пути ± (0,1-1) мм и бесконтактные индуктивные выключатели, обычно трансформаторные с дифференциальной схемой, обеспечивающие точность до ± 0,01 мм. Используются также специальные дискретные кодовые датчики положения, обеспечивающие несколько команд, используемых кцк начальные (грубые) и конечные (точные) сипцлы при остановке. \ Датчики перемещения обеспечивают контроль перемещения с высокой точностью (порядка ± 0,001 мм). Из аналоговых датчиков наибольшее распространение получили индуктивные датчики, имеющие высокие уровни выходных сигналов, обладающие большой надежностью. Широкое распространение получают импульсные и цифровые датчики перемещения, а также комбинированные импульсно-фазовые и аналогово-цифровые. Используются оптические и фотоэлектрические системы измерения перемещений. Существенное влияние на точность измерения перемещений оказывает связь датчика с исполнительным органом рабочей машины, которая может быть непосредственной, через силовую кинематическую цепь и через специальную измерительную кинематическую цепь. Процесс позиционировании сводится к остановке электродвигателя в требуемой позиции исполнительного органа. Остановка осуществляется обычно с электрическим и механическим торможениями двигателя. В зависимости от требуемой точности и производительности применяется различный цикл работы при остановке, включающий: равномерно замедленное движение; переход н по-ниженнуюскорость при двухступенчатом останове или использование нескольких промежуточных скоростей при миогоступенчйтом останове и функциональное снижение скорости до скорости отключения двигателя, которая может быть равной нулю. Точность остановки и производительность (время дотягивания) позиционирования зависят от нагрузки привода и его электромеханической характеристики, статизм которой может выбираться из заданной точности остановки. При разных нагрузках электропривода торможение происходит при разных значениях замеалении, что и снижает точность остаж)вки. Поэтому используется двух- или многоступенчатое торможение с большой скорости на малую скорость дотягивания, а с нее-. до скорости остановки. Для этого устанавливают два датчика, из которых первый (ДИЗ - датчик импульса замедления) подает команду на начало торможения с большой рабочей скорости, а второй (ДТО - датчик точной остановки) - на отключение двигателя со скорости дотягивания. Время дотягивания при любых нагрузках может быть сведено к минимуму. Для этого устраняется статическая ошибка регулирования и формируется стабильный процесс замедления скорости, инвариантный относительно нагрузки. Это более эффективно и точно выполняется в электроприводах постоянного тока с замкнутыми системами регулирования скорости, имеющими достаточно высокие показатели регулирования как в статических, так и в динамических режимах. Однако такие электроприводы в режиме позиционирования работают как разомкнутые системы по положению, в которой все факторы, влияющие на путь торможения, сказываются на точности. Более точно обеспечивается позиционирование электроприводов в системах, замкнутых по положению и работающих с управлением по отклонению. Основными требованиями, предъявляемыми к позиционным электроприводам, являются: точность позиционирования, определяемая обычно как полоса расстояний по обе стороны от заданной позиции, в которой должен быть остановлен исполнительный орган; стабильность, оцениваемая как повторяемость результатов точности при многократной отработке одного и того же заданного перемещения; производительность, определяемая временем отработки заданного перемещения и временем позиционирования; экономичность, определяемая минимумом капитальных и эксплуатационных затрат. Точность позиционирования оценивается погрешностями, возникающими при остановке исполнительного органа. С точки зрения электропривода максимальная погрешность оценивается следующим образом: А<В 2Л1д, Д<в tmax\ hp J д, max fi)cp Jmax д.ср где A(Pmax ~ максимальная угловая погрешность или неточность остановки; юр, р, ср Scp - средние значения начальной скорости, времени позиционирования, динамического момента и момента инерции электропривода; Д0) , М , Ш , Jsmax -их максимальные отклонения от средних значений. Как видно, погрешность позиционирования зависит от средней начальной скорости, нагрузки электропривода, оказывающей влия-
|
||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


