
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода и контроль скорости и момента (В2) электропривода в динамических режимах пуска и торможения электрического двигателя. В таких электроприводах используются контактные и бесконтактные электрические аппараты релейного действия (см. § 3.3). В силовых устройствах используются контакторы и бесконтактные тиристорные коммутаторы, в управляющих устройствах - контактные реле и бесконтактные логические 0J Рис. 6.1. Структурная схема резисторного электропривода. элементы, в командных устройствах - кнопки, командоконтроллеры, ключи управления и в устройствах обратной связи - различные простейшие контактные и бесконтактные датчики. В группе резисторных электроприводов большое место занимают электроприводы без регулирования скорости, работающие с постоянной установившейся скоростью. Резисторные,электроприводы, как и любые другие, обеспечивают динамические (переходные) и статические (установившиеся) режимы работы. В динамических режимах обеспечиваются пуск, реверсирование и остановка электропривода с торможением и без торможения. Процессы пуска в резисторных электроприводах обеспечиваются прямым подключением обмоток двигателя к питающей сети без ограничения и с ограничением пускового момента (тока). Без ограничении момента пускаются АД с коротко-замкнутым ротором, маломощные ДПТ (до сотен ватт), приводящие в движение исполнительные органы рабочих машин, не требующих ограничения момента в переходных режимах и допускающих ускорения, обеспечиваемые двигателем прн его прямом подключении к сетн. Устройство управления А в таких электроприводах (см. рнс. 6.1) только усиливает сигналы управлении, поданные командным устройством S и датчиком обратной связи по положению рабочего органа рабочей машины В1, или часто отсутствует совсем. В этом случае сигналы управлении подаются сразу на силовое устройство Q. С ограничением моментов запускаются АД с фазным ротором и ДПТ средней и большой мощности (единицы - сотни киловатт), в которых независимо от требований механизма пусковые токи ограничиваются на уровне допустимой перегрузочной способности. В таких электроприводах применяется параметрическое ступенчатое упранленне моментом при пуске и торможении с резисторным регулированием тока. Количество ступеней пускового и тормозного резисторов определяет требуемую точность стабилизации момента двигателя при пуске и торможении или обеспечивает момент, превышающий статический в переходном процессе. Управление моментом в переходном процессе производится по программе, заданной числом ступеней пускового или тормозного резисторов, автоматически отключаемых через определенные, заранее заданные проме- 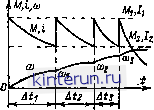 Рис. 6.2. Переходные процессы прн трехступенчатом резнсторном пуске ДПТ и АД с фазным ротором. жутки времени Ах, A/j, Дз, при достижении определенных значений скорости ш, (Oj, (Оц и прн определенных токах /j (рис. 6.2). В зависимости от используемого принципа управления программа управления пуском или торможением двигателя обеспечивается с заданием времени нлн с контролем скорости или тока. Контроль скорости н тока осуществляют простейшие релейные датчики скорости и тока, которые по цепн обратной связи подают команды в устройство управления электроприводом на отключение соответствующих ступеней пускового или тормозного резистора. Такое управление называют также управлением в функции [6.1, 6.2] или по принципу [6.3] времени, скорости, тока. Управление моментом по программе с заданием времени производится с помощью реле времени, отсчитывающих заранее заданное время изменения скорости двигателя на каждой ступени ускорения или замедления Ai, Аа, А<з. Эти реле времени подают команды на включение контакторов ускорения н отключение тормозных контакторов в моменты времени окончания разбега нли торможения на каждой из ступеней пускового или тормозного резисторов. Управление моментом с заданием времени используется при пуске и динамическом торможении двигателей постоянного и переменного тока. Оно получило широкое распространение в электроприводах различных производственных механизмов, так как обеспечивает примерно постоянные времена пуска и торможения независимо от действия различных возмущающих воздействий [6.3]. В схемах используются простые электромагнитные реле времени, данные по которым приведены в § 3.3. Время переходного процесса при пуске и торможении двигателя определяется из уравнения движения (см. § 2.1). Если момент двигателя на расчетной ступени пускового или тормозного резистора линейно зависит от скорости или эта зависимость близка к линейной, что почти всегда имеет место при реостатных пусках и торможениях, то время изменения скорости двигателя (время пуска) от начальной скорости нач ДО конечной а кон при M(. = const определяется на любой ступени по следующему уравиеиию: J (Окон - й>иач jj, Мнач - Мс Мнач - Мкон Мкои - Мс где J - момент инерции электропривода; Мнач. Мкон - начальные и конечные значения моментов двигателя, соответствующие скоростям ©иач и кон каждой ступени; Мс - момент статической нагрузки на валу двигателя. Расчет времени может производиться по динамическим моментам двигателя в абсолютных или относительных единицах Л1л. иач <1>кои-< Мц, иач - Л1д, кои 1 ®кои* (йнач* 1п, д. кои Мп. HJ Мной Л1д, иач* - Мд, кои* Мд, кон* где Мд.нач; Мд, кои - динамические моменты двигателя, соответствующие скоростям Шнач и о>кон; Мном! о)ном - номинальные момент и скорость двигателя; Мд.нач*! Мд.кон*; нач*; ®кои*-относительные значения динамических моментов н скоростей по отношению к их номинальным значениям, для каждой ступени. Выдержка времеии реле определяется с учетом собственного времени включения включаемого им контактора ускорения вклАГЖ. где вклСА! - собственное время включения контактора ускорения. Время торможения электропривода для линейной механической характеристики двигателя при реактивном М = const на любой ступени ,-в> .Мна, + Мс иач д Мнач - Мкои Мкои-Ь Мс нач кои Выдержка времени реле с учетом собственного времени отключения контактора торможения равна: Дт = т-отклАГЖ. t где t ijf - собственное время отключения контактора торможения. Управление моментом с контролем скорости обеспечивается с помощью датчиков скорости двигателя. При этом управляющие команды на включение контакторов ускорения и отключение тормозных контакторов подаются при достижении скорости переключения на требуемых ступенях пусковых или тормозных резисторов. В качестве датчиков скорости, подающих управляющие команды, используются реле напряжения, контролирующие скорость ДПТ по их ЭДС; АД и синхронных двигателей по ЭДС и частоте тока в роторе. Напряженне на обмотке реле, подключенного к як(Ч)ю ДПТ НВ, определяется как t/p = СО) -Ь ?я, где 0), / - значения скорости и тока двигателя, при которых реле напряжения должно втянуться и подать команду. Напряжение на обмотке реле, подключенного через выпрямитель к двум фазам ротора АД, является функцией скольжения, соответствующего требуемой скорости Up = = схгк*. где *сх - коэффициент, змися-щий от схемы выпрямления; - линейное значение ЭДС неподвижного ротора; S - скольжение. Управление моментом с контролем скорости используется в основном в тормозных режимах двигателей постоянного и переменного тока. Управление моментом с контролем тока обеспечивается с помощью датчиков тока двигателя. В этом случае управляющие команды на включение контакторов ускорения подаются при спадании тока якоря до нижнего предела переключения тока (см. рис. 6.2) на всех ступенях пускового или тормозного резистора. В качестве датчикот тока в рези-сториых электроприводах исиотазуются реле минимального тока, обмотки пэторых включаются в силовые цепи двигателя. Этот принцип управления не получил распространения при пуске и торможении ДОТ при номинальном потоке и двигателей переменного тока, несмотря на его достоинства, заключающиеся в поддержании тока и момента двигателя иа заданном уровне и отсутствии влияния колебаний температуры окружающей среды иа уставки токовых реле. Это связано с трудностью настройки токовых реле и большим влиянием возмущений по нагрузке и напряжению питающей сети, прн изменении которых изменяется динамический момент двигателя и соответственно время переходного процесса. Кроме того, при чрезмерном возрастании момента сопротивления иа валу двигателя возможно застревание его на промежуточной ступени пускового резистора. Управление моментом с контролем тока применяется только в режимах пуска и торможения ДПТ НВ при ослаблении и усилении магнитного потока двигателя, а также при пуске н синхронизации синхронных двигателей. Типовые схемы, использующие управление с контролем тока, приведены в [6.3, 6.4]. 6.2. принципы автоматического управления скоростью и моментом в системе управляемый преобразователь - двигатель Автоматическое управление скоростью и моментом наиболее полно проявляется при регулировании напряжения электрического двигателя в системе управляемый преобразо-вазель - двигатель (УП-Д). В электроприводах постоянного тока питание электрического двигателя (рис. 6.3, а) осуществляется от управляемых преобразователей (выпрямителей) UM (см. § 3.2.1) и продолжают применяться электромашинные вращающиеся преобразователи - генераторы с вентильными возбудителями (рис. 6.3, б). Использование генераторов постоянного тока связано с неудовлетворительными энергетическими показателями сетей, на которые ока- 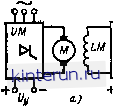
роваиии по отклонению управляемого параметра от заданного значения. Структурная схема системы регулирования скорости и момента электропривода приведена иа рис. 6.4. При регулировании (стабилизации) скорости двигателя используется главная отрицательная обратная связь по скорости, осуществляющая контроль скорости двигателя в динамических и статических режимах с помощью датчика обратной связи по скорости В2. 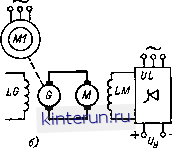  Рве. 6.3. Схемы питания электродвигателей постоянного <а, б) н переменного (в) токов. зывают большое влияние процессы коммутации вентилей при использовании вентильных преобразователей. При необходимости регулирования скорости измеиеиием магнитного потока двигателя его обмотка возбуждения питается также от управляемого преобразователя (рис. 6.3, а, о). В электроприводах переменного тока используются также статические веитильиые управляемые преобразователи напряжения и частоты (рис. 6.3, в), позволяющие обеспечить управление скоростью и моментом двигателя путем изменения частоты и напряжения питания. Системы УВП-Д осуществляют задание и автоматическое поддержание постоянства скорости или момента двигателя в установившихся и переходных режимах. Такие системы выполняются замкнутыми с обратными связями по скорости, напряжению и току с питанием двигателя от управляемого преобразователя напряжения, тока или частоты. Это позволяет обеспечить большие диапазоны регулирования скорости (до 10 ООО и выше), высокие статические н динамические показатели точности, при которых отклонения момента и скорости двигателя от заданных значений составляют целее 0,01 %. Такие системы электропривода обеспечивают стабилизацию параметра регулирования на одиом заранее заданном уровне. Поэтому процесс стабилизации является частным случаем процесса управления и называется регулированием и системы стабилизации называются системами регулирования параметров. В иих используются принципы регулирования по отклонению и возмущению. Основным принципом управлеиия (регулирования) является принцип обратной связи, позволяющий осуществлять контроль регули- Командное устройство S задает уровень регулирования скорости, поэтому его называют задатчиком скорости. Управляющее устройство, в качестве которого обычно используется сумматор А W, сравнивает сигнал задатчика из с сигналом обратной связи Uc, определяет ошибку управления Uy - Ua - и вырабатывает управляющий сигнал, пропорциональный ошибке и ее знаку. В системах регулирования скорости применяются Рис. 6.4. Структурная схема системы регулирования скорости и момента алектропрввоаа. также внутренние обратные связи, обеспечивающие обратную связь по внутреннему параметру, например по напряжению U двигателя. Оиа осуществляется с помощью датчиков напряжения UV. Стабилизация момента двигателя обеспечивается в рассматриваемых системах регули-, рования с помощью отрицательной обратной связи по току двигателя или для этого используются системы с питанием двигателей от источников тока (см. разд. 7). В системах регулирования скорости двигателя задающее (управляющее) воздействие обычно в виде напряжения задания 11 с за-
|
||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


