
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Диаграммы, соответствующие этому ре- жиму, показаны иа рнс. 5.10. Для режима работы S7 характернзую-щими величинами являются: число включений в час, коэффициент инерции и постоян- Рнс 6.9. Диаграммы М, ЛР. н б прн работе двигателя в режиме S6> периода недостаточна для достижения теплового равновесия за время одного рабочего цикла. Соответствующие данному реЖиы дНахраммы для случая трех периодов частоты вращения показаны на рис. 5.11. !-,-Пу-/ i! . 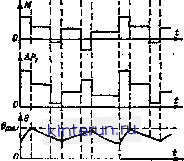 штгтшт Рнс. S.it. Диаграммы ш, М, ЛР. н в при работе двигателя в режиме S8. ная кинетической энергии, (ределяются следующие значения величии: г = ЭВ, 60, 90, 120, 180, 240 н 360 вкл./ч; к, == 1,2; 1,6; 2; 2,5: 4. 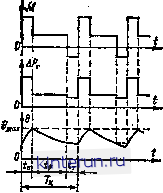 Рнс. 5.10. Диаграммы М, ЛР. н в прн работе лвнгателн в режиме S7. S8. Режим работы пря периодическом изменении частоты иращения и нагрузки - последовательность идентичных рабочих циклов, каждай нз которых состЬит эз периодов ускорения, рабош при постоянной нагрузке, соответствующей заданной частоте вращения, затем одаого или нескольких периодов работы при других постоянных значениях нагрузки, соответстаующих другим частотам BpaiQeaH; длительность каждого рабочею Для режима работа S8 характеризующими иеличинамн являются число иключе-ннй ц.,час, относительная прододжителшость работы (ПР) для каждой внешней нагрузки и соотаетствугаоскей частоты врааения, а также коэффианент ииерави и постоянная кинетической энергии. Огяоситепьнаи продолжительность работы и данном случае для каждой из нагрузок опре№Лнется по формуле up,J±::hi.m%. (5.16) где tj - период работа при постоянной }-& нагрузке; < , у -пиод иерезвддного процесса (ускорения или замедления) при переходе к /-му значен частоты вращении (угловой скорости) и соответствующей ей нагрузке. . Например, для диаграммы рис. 5.11: nPi = y + <pl+al + <pS + 3. + <p °° Tu 100% = 100 %: ПРа = 31 + 1 100 %; ПР,= a + p. 100%. Для режима работа S8 определяются следующие значения величин: z - 30, 60, 90, 120, 180, 240 и 360 вкл./ч; kj = 1,2; 1,6; 2; 2.5; 4; ПР= 15, 25, 40 н 60%. В каталогах на электрические машины приводятся даииые для номинальных режи- -5.3] Выбор электродвигателя по яоцкости мов S1, S2 н S3. Задача выбора электрической машины по мощности заключается в том, чтобы правильно сопоставить ее рабочий режим с номинальным, обеспечив максимальное использование выбранного двигателя по условиям нагрева. 5.3.4. Методы эквивалентнрованнн потерь в ааекгродвнгателе В случае работы электропривода в режиме продолжительной неизменной HaiysKH наибольшее превышение температуры является установившимся значением иревыше-ння, которое в свою очередь определяется потерями в двигателе - см. (5.4). При работе же с циклической переменной нагрузкой максимальное превышение температуры определяется средними за рабочий цикл тепловыми потерями -см. (5.7). Оценка превышения температуры двигателя через ДЯх.ср носит название метода средних потерь. Очевидно, что температура двигателя не будет превосхрдить допустимое значение, если в процессе работы средине тепловые потерн в ием ДРт.ср не превосходят потери, соответствующие его номинальному режиму ДРт.ном- Таким образом, условие выбора двигателя по допустимому превышению температуры имеет внд: Ат.срДт.яом. (6.17) Однако это условие является средством проверки, а не выбора двигатели, так как значение АР определяется не только нагрузкой привода, но и его параметрами. В связи с этим на практике прн выборе дангателей по мощности используются методы косвенной оценки потерь, а следовательно, н превышения температуры. С этой целью вводятся понятия эквивалентных по условиям нагрева величин тока главной цепн даигателя момента М, н мощности Pg. Указанные эквивалентные величины вводятся нз условия равенства обусловленных ими тепловых потерь в даигателе и средних за цикл потерь. Потерн в электрической машине могут быть разделены на дае составные части: ие зависящие от нагрузки дангателн постоянные потерн k и переменные потерн о, обусловлетные нагрузкой даигателя. Последние определяются потерями в активных сопротивлганях главных цепей даигателя - якоря для ДПТ, статора и ротора - для машин переменного тока. Следовательно, переменные потери пропорциональны квадрату тока главной цепно - гГ. Таким образом, потерн, обусловленные эквивалентным током даигателя, С другой стороны, АРт, ер f-jAPr *=*4- р it) dt. Отсюда прн ступенчатом графике нагрузки (5.18а) Следует ннйгь в виду, что приведенные выражганя для /, справедливы прн условии, когда в процессе работы даигателя сопротивление главной цепн остается нензиен-иым (г = const). Полученные значения эквивалентного тока могут использоваться лишь для проверки правильности выбора двигателя по условиям нагрева. Очевидно, дангатель выбран правильно, если /./яою (§.19) где /ном - значение тока главной цепн дангателн, соответствующее его номинальному режиму. Если момент даигателя пропорционален току главной цепн (Ф = const), то можно ввести понятие эквивалентного момента: (6.20) прн ступенчатом графике нагрузки AIg = l/S. (Б.20а) Метод э KB и в а л е н тн о го мo м е и т а моЖет быть использован дая выбора двигателя, есля нжестна нагрузочная дааграмма ааекгропривода в виде завнсн-мостн М {f), а для выбираемого даигателя соблюдаются условия: г = const и Ф = conat. Условие правильного выбора по нагреву соблюдаетси при Л1,=€Мво . (5.21) где Миом - момент даигателя, соотаетствую-щнй его ншивальвому режвму. Когда мощность, развиваемая дангете-лем, пропорциональна току, т. е. если Ф = = const и <о = const, ьюжет быть использовано понятие эквивалентной мснциоств (5.22) при ступенчатом графике нагрузш Метод вквивалентной мощно с>в- и также кспояьзуется для выбора даигателя по мощности, если известна нагру- аовдая диаграмма электропривода, в виде зависимости Р (f), а для выбираемого двигателя соблюдаются условия: г = const, Ф =5= const, ш = const. Условие правильного выбора по нагреву РзРты. (5.23) где Рно - мощность, развиваемая двигателем в номинальном режиме. Когда в процессе работы может иметь место заметное ухудшение теплоотдачи, свя-аанйое со снижением скорости электропривода, в приведенные формулы эквивалентных величин следует внести коррективы в соответствии с (5.9), а именно: (5.186) (5.206) Условия правильности выбора двигателя аналогичны (5.19), (5.21). 6.З.Б. Вы&>р двигателя при работе в режиме S1 Электропривод работает в режиме S1, если длительность действия нагрузки превышает (3-4) Гн, 1ШИ этом нагрузка может быть неизменная либо изменяется циклически прн времени цикла Гц > 10 мни. В этом случае целесообразно выбирать двигатель, ДЛЯ которого режим S1 является номинальным. Прн неизменной статической нагрузке должны выполняться условия: РсРу, (5.24) где Мс, Рс - момент и мощность статической нагрузки; Л1но , Риом - момент и мощность, развиваемые двигателем прн номинальном режиме S1. Прн циклическом характере нагрузки и Гц < Гв условия выбора двигателя следующие: ! ВО ; Pg РНОВ (5.25) Здесь Ма и Р, определяются по (5.20), (5.20а), (5.206),. (5.22). (5.22а). Если прн циклическом характере нагрузки отдельные участки работы столь продолжительны, что tpj > (3-!-4) Гн, то выбор двигателя следует осуществлять по условиям максимальной нагрузки (5.26) где Afc max, Рстах- максимальные значения момента н мощности статической нагрузки. Выбранный двигатель должен быть про-яерен по условиям пуска MeycH>Afcmo*. (5.27) а прн циклической нагрузке (Гц < Гц) и по перегрузочной способности ; Mmaxiv>n=iMK> Метах. (5.28} 5.3.8. Выбор двигателя нри работе в режиме S2 ,Цля электроприводов, работающих в режиме S2, нецелесообразно выбирать двигатели, предназначенные для работы в режиме S1, так как последние, как правило, обладают ограниченной перегрузочной способностью, в связи с чем в данном случае они недоиспользуются по нагреву. Пря выборе же двигателей, предназначенных для работы в режиме S2, приходится сталкиваться с тем, что время работы ве совпадает со временем продолжительности Ml О
Рве. 5.12. К определению М, прв электропривода в режюю S2. работе кратковременной работы, определяемым стандартом, - 10; 30; 60 и 90 мин. Кроме того, нагрузка привода за вря работы может изменяться - см., например, рнс. 5.12. В этих случаях рассчитываются эквивалентные величины, которые приводятся к стандартному значению продолжительности кратковременной работы tp, , ближайшему к реальному Значению р. При выборе двигателя долямы соблюдаться следующие условия: у р.СТ р. СТ ;Рнов<р, , (6.29) р.ст - эквивалентные значения ГЛеА1а/р. .Ра/р. момента и мощности за время работы двигателя р, прнведенишк ближайшему стандартному значению tp,ct;Mtp,JPbtpct ~ номинальные значения момента и мовшостн двигателя, соответствующие продолжительности кратковременной работы ip.cT- Выбранный двигатель также должен быть проверен по условиям пуска - (5.27) н по перегрузочной способности - (5.28). 5.3.7. Выбор двигателя прн работе в режиме S3 Для электроприводов, работающих в режиме S3, целесообразно выбирать двигатели, предаазначеииые для этого режима. Последовательность расчета в этом случае следующая. По нагрузочной дааграмме определяются (см., например, рнс. 5.13):
|
||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


