
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода механические характеристики асинхронного привода с ТРН для ряда значений а = const. С увеличшием а уменьшается критический момент двигателя и вместе с тем сиижатеся модуль механических характеристик. С целью увеличения диапазона регулирования скороств в таких асинхронных электроприводах используются обратные связи. Как правило, наиболее часто применяется отрицательная обратная связь по скороств, осуществляемая с помощью тахогенератора. Механвческие характеристики электропривода для этого случая показаны на рис. 4.34 штрихпунктириыми линиями.  Рис. 4.3S. К принципу регулирования скорости АД прн ие-снмметрнчиом изменении напряжения- Некоторое распространение получили способы регулирования скорости АД путем несимметричного изменения напряжении на статоре фИс. 4.35). В общем случае I Оаь I Ф 4.4.2. Регулнровавве С1Юрости при импульсном изменении напряжения Регулирюаиие иапряження ва двигателе можно осуществлять импульсным методом, когда дангатель периодически под-ключаетси к источнику питания и отключается от него (см. 3.2.1). При этом в тот период, когда дангатель подключен к иеточни!? питаний, происходит передача энергии от источника к электроприводу, которая главным образом передается через вал даигателя производственному механизму, а часть ее запа- 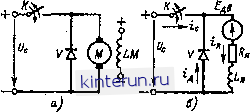 Рис. 4.36. Принципиальная (а)-и эквивалентная <б) схемы системы импульсный регулятор напряжения - ДПТ нв. сается в виде кинетической и элекгромагнят-ной энерган; в период же отключения электропривод продолжает работать, используя запасенную энергию (см. § 3.2.1). Принципиальная схема системы импульсный регулятор напряжения - ДПТ независимого возбуждения СИРН - Д) показана на рис. 4.36,а,.а эквивалгатная ей схема - ва рис. 4.36, б. В этой системе якорь двига- теля с помоп >ю коммутирующего ключа периодически подключается к источнику постоянного тока, напряжение которого неизменно. В период включеявого состояиня ключа ток якоря f, равен току tc, поступающему от источника питания через ключ R, так как включенный параллельно якорю Диод V в этом случае закрыт в результате подачи ва его анод отрицательного напряжения источника питания. После размыкания К под действием ДС самоиндукции в цепи якоря продолжает проходать ток, замыкаясь через диод V, т. е. в этот период <я = *д-
Рнс. 4.37. Диаграмма изменения напряжения на нкоре двигателя и токов икоря потребляемого из сети и в шунтврующем якорь диоде. На рис. 4.37 показаны дааграммы изменения напряжения иа даигателе Идв и токов: якоря ДОТ fg (О, потребляемого из сети /. ( и в диоде <д (О. дааграммы построены прн условии, 4fro коммутация ключа осуществляется мгновенно, т. е. цепи источника питания и даода ие обладают иидухтивиостью. Среднее значение момента определяется выражением А1ср = [Мс (1+ + (Д<й, +Affla)]. Ураввенве электромеханической характег ристики системы ИРН - Д имеет вид: 0>ср = тг/с-я./ср (4.24) ср = М. (4.25) Уравнение механической характеристики Тс д. Механические в электромехавическне характеристики представляют собой параллельные друг даугу прямые, отсекающие иа оси ординат отрезки УФ,. (4.26) При принятых допущениях {R = 0; /?д = 0) жесткость механических характери- стак в рассматриваемом случае равна жесткости естественной механической характеристики ира-д- = Р = (*Фнои) Из (4.24) - (4.26) следует, что изменение относительной продолжительности замкнутого состояния ключа или скважности у = tiJT позволяет осуществлять регулирование скорости ДПТ. Изменение у может выполняться различными способами; При широтно-импульсном регулировании (ШИР) остается неизменным период коммутации = cmist, значит, частота коммутации = l/Tg = const, а изменение у Осуществляется путем изменения времени замкнутого состояния ключа; при этом ii = var. В случае частотно-импульсного регулярования (ЧИР) остается наизменной длительность включения ключа (1 = const) и изменяется частота коммутации {t = var), а значит, и длительность периода коммутации Tg = 1 = var. Возможен также и комбинированиьгй - ши-ротночастотный способ импульсного регулирования (ШЧИР), когда одновремеино изменяются и длительность замкнутого состояния и частота коммутации. Из указанных способов наибольшее распространение получил первый - ШИР, так как при его использовании удается относительно просто осуществить изменение y, от О до 1, что в свою очередь, дает возможность в широких пределах регулировать скорость двигателя, второй способ - ЧИР - характеризуется, как правило, более простыми ; схемными решениями, од-иавп в этом случае не представляется возможным осуществить глубокое регулирование скорости, так как при ti = const для у-*-О необходимо, чтобы - - те или /к О, т. е. по существу вырождается идея импульсного регулирования. Выражения (4.24) и (4.25) справедливы только в том случае, когда в цепи якоря проходит непрерывный ток Если же в период отключённого состояния ключа ток {, успевает снизиться до нуля и в кривой тока содержится пауза, как показано на рис. 4.38, б, то имеет место режим прерывистого тока. В этом случае движение привода во время паузы тока связано с ббльшим расходом запаса кинетической энергии, чем в режиме непрерывного тока, н соотношение между (Вер и /ср изменяется по сравнению с режимом непрерывного тока. Условия определения начально-непрерывного (граничного) тока в соответствии с графиками на рнс. 4.38, а могут быть сформулированы следующим образом: где /к. 5 = UJR,. Из последнего выражения видно, граничный ток изменяетси при регулировании скорости. Наибольшего значения граничный ток достигает при тр = 1/2: гр те* =к. s/STafк, а при 7 = 1 и v= О имеем lp = 0, что естественно, так как в первом случае якорь двигателя все время подключен к сети, а во втором - имеет место режим динамического гя1 1яг Рнс. 4.38. Диаграммы нзменення тока якоря при работе системы ИРН-Д в режимах иачальио-непрерывиого (а) и прерывистого <б) токов. торможения прв отсутствии дополнительного сопротивления в цепи якоря. На рис. 4.39 зона прерывистых токов отделена штрихпуиктврной линией Югр (гр)-Для сужения этой зоны следует увеличить Т путем Включения в цепь якоря дополнительной индуктивности или увеличить частоту frpihp) - Рис. 4.39. Электромеханические (мехавическне) характеристики системы ИРН-Д, выполненной по схеме рис. 4.36. коммутации ключа f, т. е. сократить Tg. Первый путь приводит к ухудшению динамических показателей электропривода, а возможности второго способа ограничены. Действительно, на практике в качестве переключающих устройств применяются транзисторные нли тирнсторные ключи, частота переключений которых ограничена для первых главным образом тепловыми потерями при работе в режиме переключений, а для вторых - временем восстановления управляющих свойств. На практике для реальных установок обычно качение /к не превышает 8Ш)-1200 Гц. Одним из существенных недостатке способа является пульсация тока якоря, три-водящая к дополнительному нагреву ДПТ. 4.5. РЕГУЛИРОВАНИЕ СКОРОСТИ * СИСТЕМЕ ПРЕОБРЛЮВАТЕЛЬ ЧАСТОТЫ-ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА Этот способ перспективен как для отдельных регулируемых АД в СД, так в при одиовремевном взменении скорости нескольких АД, првврдящих в движение группы механизмов - текстильных машин, конвейеров, рольгангов в т. д. Когда требуется получвть высокие скорости, напрвмер, центрифуг, шлифовальных станков, регулвро- при частоте /ik; Мс (Ок) - момент статической нагрузки на валу двигателя при скорости ш. В относительных единицах ззкои изме-венвя напряжения при частотном регулнрованвв Ui,h,VK, (4.29) где Ui, == UilUiBm fl. = fiZ/W. Л1с = Механические характеристики АД прв частотном регулировании скороств для различных зависимостей статической нагрузки от скорости приведены ва рКс. 4.40. 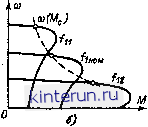  Рас 4.40. Мехаивчесиие характернстикв АД при частотном регулировании скорости, о М J = const; . б - Рд const; в - веитилиториая касрузка. ванне скорости АД изменением частоты питающего напряжения предпочтительно, а в некоторых случаях это единственный нз существующих способов. Возможность регулирования скороств АД и СД при изменении частоты следует непосредственно из выражения Прв регулирсшанив частоты необходимо изменять в значение питающего двигатель напряжения. Это объясняется тем, что при неизменном напряжении источввка пвта-ння Уг в регулированви его частоты изме-. няется MarHBTHbdi поток АД, поскольку t/j ~ йФ/i. Магнитный поток при неизменной вагрузке на валу определяет значение тока ротора, так как М = АФ/j cos fj. При выборе соотношения между частотой в напряжением, подводимым к статору АД, исходят из-условия сохранения перегрузочной способноста: Х.== Afg/Alc=const. (4.27) Закон взмевеняя напряжения при частотном регулировании скорости АД, удовлетворяющий требованию (4.27) при допущении, что активное сопротивление статора где Uij - фазное иапряжевие нс110 1ика питания асинхронного двигателя при частоте fij-, (ю/) - момент статической нагрузки на валу даигателя при сксфости ш/; t/j - фаэ8ое,-:К{и1ряжевве нрочвнка питания АД, При- Мс = const (4.29) запишется в виде (4.30) нлн Ui/fi ~ const. При Рс = Мс to = const Ux,Yk, (4.3!) или Ui/YTi = const. Прв вентиляторной нагрузке i/u=f?.. (4.32) или f/i f = const. Графики на рис. 4.40 в законы (4.30) - (4.32) справедливы и предположении г = 0. Уточвевный закон изменения вапряженвя прн частотном регулировании с учетом riO имеет вид: р1к + У(1+Рн)(1+Р?и) McAfl*), (4.33) где Put = ri/*K,Boi ; Рщ = Ti/Xuhoh; х>,аом - индуктиооое сопротнвленнв короткого замыкания АД при номянальвой частоте; дещои - нидукгавное сопротивление вамагнвчиванвя АД при номинальной частоте. На -рис. 4.41 покаввы мехавичесш характервстикв даигаэедя А62-4 мощностью иои - 14 кВт прн . ряаля вых значенх частоты нстоянка шярнвя: = 1,6; 1; 0,5; (ЛСс = coast). Сплошййой ятюЛ - расчет а (4.30), ШФрнховой - n (4J%
|
|||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


