
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода чего путем дальнейшего увеличения угла управления прн а > я/2 вентильный пре-о(азсшатвль подготавливается к работе в режиме инвертирования. Начальный угол управления устанавливается таким образом, чюба Ejs ~ Egg. При этом условии замыкание ранее не работавшего контактора КМ2 реверсора не приведет к большому броску тока в цепи якоря. Дальнейшее снижение а позволяет осуществить торможенне двигателя н последующий его разгон до требуемой скорости в противоположном направленнн. Для Приводов, где требуется максимальное быстродействие при реверсе, а также необходимы двигательный и тормозной режимы при одном и том же направлении вращения, пршленяютси схемы с двуми комплектами вентилей, каждый из которых проводит ток в одном из направлений, благодаря чему создается эффект двусторонней проводимости преобразователей в целом. Все многообразие схем реверсивных вентильных преобразователей может быть сведено к двум типам схем: перекрестные или восьмерочные схемы и вс1речно-параллельные или противопарал-лельные схемы (см. § 3.2.1). В перекрестных схемах каждый из комплектов вентилей получает питание от изолированных друг от друга групп вторичных обмоток трансформатора, тогда как во встречно-параллельных схемах оба комплекта вентилей могут получать питание от одной группы вторичных обмоток трансформатора. Эквивалентная расчетная схема приведена иа рис. 4.27. 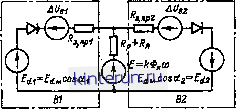 Рнс. 4.27. Эквивалентная схема реверсивного вентильного электропривода с двумя комплектами вентилей. В последнем случае с целью исключения передачи энергии, преобразованной В1, в сеть через В2 иеобуодимо, чтобы Eat 5= Egx-Если же. наоборот, в режиме выпряв1Лення работает В2, то В1 закрыт или подготовлен к работе в режиме инвертирования. Соответственно при этом Egi Ctfj. Очевидно, что в общем случае Еоя & Еов, где £<jh. dB - ЭДС комплектов вентильного преобразователя, работаюихих соответственно в режимах инвертирования н выпрямления. Прн работе электропривода в режиме рекуперативного торможения один из комплектов нентилейраветает в ренснме нйверти-роВання, а второй либо закрыт, либо подготовленк работе в режиме выпрямления. В этом случае по-прежнему должно соблюдаться соотношение Еа 5= Ев- Режим работы реверснвногв вентильного преобразователя в значительной мере определяется способом управления обоими комплектами вентилей (см. § 3.2.1). Для оценки энергетических показателей регулируемого электропривода постоянного тока с вентильным преобразователем рассмотрим зависимости КПД и коэффициента мощности установки от скорости. Коэффициент полезного действия системы управляемый вентильный преобразователь - двигатель (УВП - Д) может быть определен как %вп-д Ea-xlj2}i Учитывая, что числитель полученного выражения пропорционален угловой скорости двигателя, можно записать: %вп-д = *Фвом или в относительных единицах у - ш,-1-Дш,.-1- я.М. где АШв = Аив/*Фиомв о - относительное значение падения скорости, обусловленного падением напряжения на вентилях ДС/.; = + + Значение 1Д системы УВП - Д зависит как от нагрузки на валу двигателя, так и от скорости прн регулировании. В случае постоянного момента на валу со снижением скорости будет иметь место уменьшение КПД. Следует также отметить, что заметное влияние на КПД установю) может оказать мощность потерь в управляемых вентилях,. V 0,8
Рис. 4.28. Зависимость КПД системы ТП-<Д от скорости при М равная ДРв = ДУвя- случае использования тирнсторных преобразователей относительное падение напряжения на вентилях составляет доли процента. На рнс. 4.28 показаны завнснмосга КПД системы-УВП - Д от скорости при номинальной нагрузке яа валу двигателя ври слу- чае, когда преобразователь выполнен иа базе TiipHCTOpoB (%> н ионных вентилей в)-Там же для сравнения представлена зависимость г д для системы Г - Д. Сравнение кривых на рис. 4.28 показывает, что КПД электропривода, выполненного по системе УВП-Д, заметно выше, чем КПД в системе Г - Д. Коэффициент мощности системы УВП - Д определяется, двумя факторами: углом сдвига фх первой гармонической составляющей тока, потребляемого вентильным преобразователем из сети, относительно напряжения сети и коэффициентом исиажения v того же тока Л, = УС08ф1, cos ф1 =ай COS (а-Ь V/2); li 2 Vm sin я/т sin у/2 I - действующее значение тока, потребляе мого преобразователем из сети; li - действующее значение первой гармонической составляющей того же тока. Из приведенных выражений следует, что коэффициен-. мощности электропривода, выполненного по системе УВП - Д, зависит 0.81- 0,2 7 О 42 0,¥ Ц6 0,8 со# Рис. 4.29. Зависимость коэффидиеита мощности системы ТП-Д и cos ф от скорости при от скорости при регулировании и от нагрузки иа валу. Снижение скорости и соответственно увеличение угла регулирования а, а также увеличение тока нагрузки, связанное с ро-CTOM.V, приводит к уменьшению коэффициента мощности установки. На рис. 4.29 приведена зависимость коэффициента мощности системы УВП - Д от скорости при номинальной нагрузке иа валу двигателя. Там же показана зависимость коэффициента мощности системы Г - Д (cos фа,д) от скорости. Сопоставление указанных зависимостей показывает, что по коэффициенту мощности система электропривода УВП - Д уступает системе Г - Д. . С целыо повышения значения X применяются методы искусственной коммутации вентилей К специальные фильтры высших гармонических составляющих. Из №аенне на1фяження аснгофонного двяп гателя приводит к изменению критического момента (см. § 3.1.3), тогда как критическое скольжение остается постоянным. В случае ненасыщенной магнитной цепи машины критический момент изменяется пропорцишаль-ио квадрату напряжения. Естественная 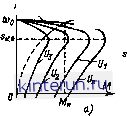 .Il Естественная J.-хдо*;  Рис. 4.30. Мехаяическве характеристики АД при снижении напряжения, а - при короткозамкнутов роторе; б - при введении в цепь ротора добавочных реаисторов. На рис. 4.30 показаны механические характеристики двигателя при различных напряжениях иа выводах статора. Со снижением напряжения уменьшается модуль жесткости механических характеристик. Кроме того, со снижением скорости уменьшается допустимый момент (пунктирные линии на рис. 4.30; см. также рис. 4.7). Энергетические показатели при регулировании скорости асинхронного двигателя изменением иапряження приблвжтельио такие же, как в при изменении сопротивления в цепи статора. Со снижением скорости уменьшаются КПД и коэффициент мощности установки. Для изменения напряжения иа выводах статора могут использоваться различные устройства: автотрансформаторы (рис. 4.31,а), 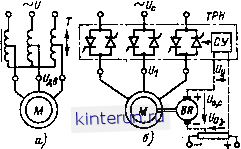 Рис. 4.31. Схемы включения АД ,с регудятораня напряжения. а с автотрансформатором; б ~< с твраеюряым регулиторои аапряжеввя. подмагиичиваемые реакторы (см. рис. АЛЩ, тиристорные регуляторы напряжения ТРН (рис. 4.31, б). Регулирование скорости асии-хвойных двигателей с помощью подмагвичи-ваемых реакторов рассмотрено в § 4.2. При использовании для этой цели авто-тфансфорыатсфа изменение капряженяя осу- ществляется путем изменения его коэффициента трансформации. Одновремеино с изменением напряжения изменяется и эквивалентное сопротивление автотрансформатора: со снижением напряжения эквивалентное сопротивление растет. Следовательно, со снижением иапряженвя на двигателе рассматриваемым способом одновременно с уменьшением критического момента будет уменьшаться и критическое скольжение. Соответствующие этому случаю механические характеристики показаны на рис. 4.32. Из этих характеристик видно, что с уменьшением иа- Естествеиная 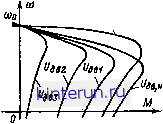 Рис. 4.32. Механичесиие характеристиии АД при регулировании скорости с помощью автотрансформатора в пени статора. %,ном > txBl > дв, > явз- еиы на основании соотношения M{s)=(j]M,j,{s)UUM{s), (4.23) \tc. ной/ где iMfp - момент на граничной механической характеристике, соответствующий углу 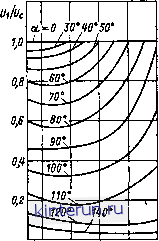 О 10 30 50 70 в пряжения сокращаются участки механических характеристик, обладающие отрицательной жесткостью. Кроме того, в рассматриваемом случае оказывается затруднительным введение обратных связей в систему регулирования скорости с целью увеличения модуля жесткости механических характеристик. В связи с этим регулирование скорости асинхронных двигателей с помощью автотрансформаторов осуществляется для механизмов с вентиляторной нагрузкой н в небольших пределах, соответствующих диапазону регулирования D = 1,2 -г- 1,3. При использовании тиристоров регулирование напряжения двигателя осуществля-естя путем изменения угла управления а. Изменению а от О до 150° соответствует изменение напряжения иа двигателе от напряжения сети до нуля. Прн таком способе регулирования зависимость напряжения на двигателе от времени имеет сложную форму. Кривая напряжения, помимо первой гармоники, содержит 5, 7, 11-ю н другие нечетные и некратные трем гармонические составляющие. Однако амплитуды высших гармонических составляющих напряжении обычно не велики н практически не оказывают влияния на развиваемый двигателем момент. Зависимость первой гармонической составляющей напряжения двигателя от значения айв аналитически ие выражается. На рис. 4.33 показаны зависимости U, (в) для ряда значений ее 14.1]. Механические характеристики асинхронного даигателя прн р1егулировании напряжении с помощью тирвсторного преобразователя (регулятора) напряжения могут быть пос- Рис. 4.33. Зависимости первой гармоничесиой составляющей напряжения яа выходе ТРН от угла регулирования а и угла нагрузин в АД. а = 0. определяемый по формуле Клосса, [4.1], в которой 3i/ h0 к.1 р = - активное сопротивление тиристора в проводящем направлении. Естественная 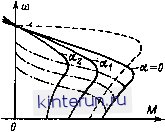 Рис. 4.34. Механические характеристики асии-хронного электропривода с тиристорным регулятором напряжения. - прн а = const ( 1 < а,); -.- при отрицательной обратной связи по скорости. Если активным сопротивлением преобразователя можно пренебречь н в цепи ротора нет добавочного сопротивления, то граничная характеристика совпадает с естественно На рис. 4,34 сплошными линиями нокаэа
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


