
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Действительно, прн неизменном токе подмаг-вичиваиия ток в реакторе, а следовательно, н включенном последовательно с ним АД остается почти- неизменным прн изменении напряжения в относительно широких пределах. Реакторы же с самоподмагннчнваннем 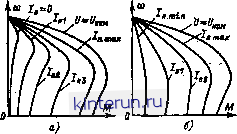 Рис. 4.16. Механические характеристики АД прн регулвроваивв его скорости реактором, а г- без самоподмагничиваяия; б - с самопод-магн нчиван ием. близки ПО СВОИМ свойствам к источникам напряжения, так как при иамеиении тока в их рабочих обмотках напряжение на нагрузке практически не изменяется. При регулировании скорости реакторами без самоподмагии-чивания механические характеристики АД при разных значениях тока поДмагничивания будут содержать участки, близкие к гиперболе (рис, 4.16, а). При регулировании же скороста с помощью реакторов с самопод-магничиванн к1 механические характеристики будут близки по виду к характеристикам, получаемым в схемах с регулируемым источником напряжения (рис. 4.16,6). Если ие принимать специальилх мер, диапазон регулирования рассматриваемым способом не превышает 1,3-1,5. В асинхронных электроприводах, управляемых с помощью реакторов, можно получить более жесткие механические характеристики, чем характеристики, показанные на рис. 4.16, если с изменением нагрузки на валу АД соответствующим образом ишенять управляющий сигнал - ток подмагивчивания. Из анализа характеристик на рис. 4.16 можно заключить, что для поддержания примерного постоянства скорости при возрастайии момента статической нагрузки необходимо увеличивать ток подмагиичивания, а при снижении момента - соответственно уменьшать /ц. Так как мощность источника, необходимого для пнтаиия обмоток подмагничивания, во много раз меньше мощности АД, то реализация указанного принципа изменения управляющего сигнала, как правило, не вызывает затруднений. На рис. 4.17 показан примерный вид механических характеристик АД, регулируемого реактором, ток подмагиичивания которого увеличивается при снижении угловой скорости по сраввшию с заданной. В подобного рода схемах диапазон регулирования может быть расширен до 8-10. Оценивая экономические пок?аа-кт рас-сийфиваемого способа регулирования ско- рости АД, следует отметить, что в этом случае КПД электропривода остается примерно таким же, как и прн реостатном регулировании, тогда как коэффициент мощности заметно снижается., Значительно увеличиваются капитальные затраты. Если прн ана-  Рис. 4.17. Мехавическне харавтернстнкв АД, регулируемого реактором прн измененим тока подмагничивания в функции отклонения скорости от заданного эиачення. лнзе реостатных способов регулирования обычно не принимают во внимание стоимость резисторов т> сравнению со стоимостью двигателя, то в данном случае этого делать нельзя, так как габариты, масса и стоимость реактора сопоставимы с аналогичными показателями для АД. Наконец, следует учитывать, что в силу ограничения допустимой нагрузки на валу обычно приходится завышать номинальную мощность АД по сравнению с мощностью производственного механизма. 4.3. РЕГУЛИРОВАНИЕ СКОРОСТИ : ИЗМЕНЕНИЕМ ПОТОКА ВОЗБУЖДЕНИЯ Метод используется для ДПТ. Ток возбуждения, а значит, и поток могут изменяться лишь в сторону уменьшения по сравнеяию с номинальными, так как по условиям вор мальвой работы обмотки возбуждения ток в ней не может длительно превосходить номинальный. Для ДПТ НВ регулирование скорости осуществляется изменением режима работы в цепях относительно небольшой иошостц. Это, в свою очередь, позволяет получить плавное регулирование скорости. Для машин малой, а иногда и средней мощности обычно используются резисторы в цепи возбуждения (рнс. 4,18, а), а для крупных машин - специальные преобразователи U, валфимер генераторы, электромашинные усилители, магнитные усилители, вентильные прео<азова-тели <рис. 4.18, б). Допустимаи нагрузка на валу двигатели определяется как (t/иом-Яяа. иом) а>во - Допустимая мощяост] на валу даигателя является постоянной, т. е. ©Мдоп - В этом шысле принято говорить о регулировании с постоянной мощностью. В соответствии с полученным выражением зависимость допустимого момента от скорости представляет собой гиперболу, показанную на рнс. 4.19. а.) 1а,в Рас. 4.18. Схемы включелня ДПТ НВ прв ре-гулировавив сиорости иэменеввем магяитвого потока. 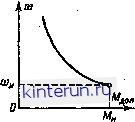 1>нс. 4.19. Заввсвмость допустамого момевта от-.-скороств при регулироваиии- скорости ДПТ изменением магнитвого потока. Электромеханические и механические характеристики приведены на рнс. 3.10. Из них следует, что с уменьшением потока возбуждення растетскорость идеального холостого хода щ = UJkfi>, остается неизменным ток короткого замыкания /к = UJRi, снижаются момент коротного замыкания = = *Ф/к н модуль жесткости механических характеристик 1 Р ] = (?Ф/Вя. С уменьшением потока вожуждення двигателя CKopcteTb растет, т. е. регулирование скоростя осуществляется вверх от основной. По мере роста ск<ости снижается модуль жесткости механических характеристик, что ограничивает диапазон регулирования частоты вращения. Кроме того, верхний предел регулирования скорости ограинчи)ается механической прочностью элементов якоря ма-аганы - бандажей обмоткн якоря; коллейто-. ра н т. д. Отечественная электротехническая промыхнленность выпускает двигатели, рассчитанные на регулирование скорости ослаб-леннем штока в диапазоне до 1:8. Оценивая энергетические показатели данного способа регулирования скорости ДПТ НВ, необходимо отметить, что потерн в силовой цепи двигателя н его КПД такие же, как н при работе на естественной характеристике. Следует также учитывать, что в связи ГС относительно малой мощностью цепн обмотки возбуждення по сравнению с номинальной мощностью двигателя затраты на регули- ровочные устройства (реостаты или преобра-зователн) в цепи обмотки возбуждення невелики. Двигатели независимого возбуждения, регулируемые путем ослабления потока, широк применяются для приводов механизмов. Рис. 4.20. Схема включения ДПТ ПВ, предусматрив а ю щ а я регулирование скорости изменением магнитного потока.  1Г Liay мощность которых с изменением скоросга остается постоянной. Ослабление потока может использоваться также н для ДПТ ПВ. С этой целью параллельно обмотке возбуждення включается шун- 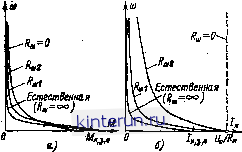 Рис. 4.2!.. Электромеханическая (а) в механическая (б) характеристики ДПТ ПВ при шуитвро-ваиви обмотки возбуждения. тирующий реостат, как показано на схеме рнс. 4.20, для которой /в = 0 = ШЩ Электромеханические н Механические характеристики для ряда значений Ra, показаны на рнс. 4,21. 4.4. РЕГУЛИРОВАНИЕ СКОРОСТИ В СИСТЕМЕ УПРАВЛЯШЫЙ ПРЕОБРАЗОВАТЕЛЬ - ДВИГАТЕЛЬ Регулирование скорости двигателей путем изменения напряжения на выводах источника нитавня в принципе применимо для электроприводов с любыми ДПТ н АД. Практически такой способ регулирования скорости для ДПТ используется главным образом нри незавнсамом вобуддювн. Для реализасдав рас<ж8Тр>вваемого способа регулнроцання необходимо нмеп> источник питания, напряжение на iuB(x которо- Способы регулирования скорости го может изменяться в широких пределах. Для ДПТ в качестве таких источников используются различного рода Управляемы преобразователи электрической энергии переменного тока в электрическую энергию постоянного тока. Наиболее широкое применение получили электромашяииые и вентильные преобразователи. В электромашииных преобразователях осуществляется двукратное преобразование энергии: электрической переменного тока в механическую и механической в электрическую постоянного тока. Регулирование напряжения на выводах вентильных преобразователей осуществляется управляемым вентильным преобразователем (см. § 3.2.1) нли изменением переменного напряжения в случае неуправляемого преобразователя. В последнем случае для регулирования напряжения иснользуются автотрансформаторы и трансформаторы с переменным коэффициентом трансформации, а также магнитные усилители. JKpoMe указанных выше способов возможен также импульсный способ регулирования напряжения, когда якорь двигателя периодически подключается к источнику с иеизмениьш напряжением и отключается от него. Регулирование напряжения в этом случае осуществляется путем измеиения относительной длительности включения якоря иа выводы источника питания. Уравнения электромеханической и механической характеристик ДПТ в такой системе. 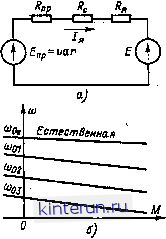 Рис. 4.22. Эквваалеитиая схема <а) алектропри-аода постояииого тока с регулируемым источником напряжеивя в соответствующие мехаииче-ские характервстики (б). На эквивалентной схеме, т>иведевной на рис. 4.22, регулируемый преобразователь представлен гаггочником ЭДС Е р, которая изменяется в процессе регулирования скорости, и эквивалентным сопротивлением R p. На эквивалентной схеме показаны также сопротивление Rc соединительных проводов и контактных совданёиий между якорем дви-сатедя и выводами преобразователя и сопротивление Ri цепи якоря даигателя.
(4.21) (4.22) С изменением Е р осуществляется регулирование только скорости идеального холостого хода а>ор = Япр/Свом> тогда какжесткость механических характеристик при неизменных параметрах цепи якоря неизменна. Прк этом механические характеристики представляют собой семейство параллельных друг другу прямых, показанных на рис. 3.1. б. Модуль жесткости механических характеристик меньше, чем модуль жесткости естественной характеристики. В частности, если Лир + /?с ?я. то IР 1= J 1 Ре . Однако по сравнению с параметрическими методами (см. § 4.2) в этом случа& при регулировании в зоне низких скоростей модуль исесткости характеристик оиазывается значительно ббльшим, что дает возможность существевио расширить диапазон регулирования скорости. Другим достоинством рассматриваемых здесь электроприводов постоянного тока является то, что для изменения ЭДС преобразователя необходимо воздействие не ва главные цепи, а иа цепи управляющих устройств-гт возбуждения в электромашияных преобразователях, регулирования угла включения вентилей а управляемых вентильных преобразб-вателях и т. п. Мощности этих цепей во много раз меньше мощности регулируемого двигателя и соответственно главной цепи преобра зователя, в связи с чем просто решается вопрос повышения плавности регулированви скорости. По той же причине для таких электроприводов оказывается относительно несложной техническая реализация и фугой проблемы: формирования специального вида статических характеристик. Регулирование скорости в рассматриваемом случае осуществляется при номинальном потоке ДПТ Ф = Фном- Вследствие этого область допустимых нагрузок при регулировании, соответствующая номинальному току якоря двигателя, ограничивается номинальным значением момента, т. е. в даином случае Лдоп (ю) = Лдв.кои = const. Напряжение на выводах якоря двигателя ие должно превышать номинальное значение. Следовательно, в процессе регулирования E pf =g Одв,вом. соответственно (Ogpfo>, значит, в данном случае возможно регулирование скорости вниз от основной. В ряде случаев с целью расширения диапазона регулирования скорости в системе регулируемый преобразователь - двигатель используют ослабление потока возбуждения двигателя- - двухзонное регулирование. Однако одновременно изменять напряжени-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


