
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Sg и Мк. что соответствует сокращению рабочего участка механической характеристики АД, как показано на рис. 4.7. Естественная (R =0) 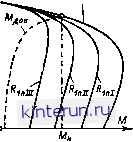 Рнс. 4.7. Механнческне характернстикн АД при регулированнн скорости измеиеиием сопротнвле-/ ния цепи статора. Зависимость допустимых нагрузок двигателя при регулировании скорости Д0П = Щ - Мнем Шо -ш (4.12) показана на рнс. 4.7 штриховой линией. Из полученных выражений следует, что с уменьшением скорости значительно снижается допустимый момент двигателя. В частности, для неподвижного АД М оп - = Миом но = (0,03 ч- 0,13) Мно . Поэтому данный метод регулирования более целесообразно применять для двигателей с относительно большим номинальным скольжением. Кроме того, необходимо, чтобы момент статической нагрузки снижался по мере уменьшения скорости, как и Mj n. В противном случае возникает необходимость завышения установленной мощности АД. Зависимость скорости от добавочного сопротивления при допустимом моменте на валу определяется как . ном, е °-~l-eiWe где а, = RiJRf Подставляя последнее выражение в (4.12), находим также Мдоп = Мном (1 - OiS oB. е)- Зависимости sj2 (а) и М (а) показаны на рис. 4.8. Диапазон регулирования ие превышает 1,15-1,2. Прн регулированнн скорости из-меиеннем сопротивлений в цепи статора КПД привода ниже, чем в случае регулирования изменением сопротивлений в цепи статора, н определяется по формуле Коэффициент мощности цепей ротора и соответственно статора с ростом Ri при оДиом и том же скольжении несколько возрастает. 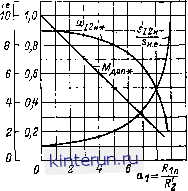 где a+a=R.2/R = Рнс. 4.8. Регулировочные характеристики *72и* i* */2и зависимость допустимого момента от добавочного сопротивления прн регулироваини скорости АД изменением сопротивления цепи. Для переключения ступеней сопротивлений по схеме рис. 4.6, б должны использоваться трехполюсиые контакторы. При включении обмотки статора в звезду по схеме рис. 4,6, в могут применяться двухполюсные контакторы. Ввиду отмеченных выше недостатков регулирование скорости АД путем изменения активных сопротивлений в цепи его статора используется относительно редко. Такие схемы могут использоваться для ограничения пусковых токов и моментов АД с коротко-замкнутым ротором. 4.2.2. Регулирование скорости АД изменением чисЛа пар полюсов Способ используется для регулирования скорости АД с короткозамкиутым ротором. Его принцип следует иепосредственио из выражения для синхронной скорости Шо = = 2n/i/p. Изменение числа пар полюсов р производится путем переключения обмотки статора. При этом число пар.полюсов коротко-замкнутого ротора изменяется автоматически. Так как р может быть только целым числом, то данный способ обеспечивает ступенчатое регулирование скорости. Для изменения числа пар полюсов необходимо, чтобы в пазы статора были уложены независимые обмоткн с различными значениями р либо прн одной обмотке статора имелась возможность изменения ее схемы соединений. В первом случае заметно увеличиваются габариты и масса АД, но при этом возможно практически любое соотношение чисел пар полюсов обмоткн. Как правило, такие АД выполняются с двумя обмотками с соотиошеннем чисел пар полюсов от 3 : 1 до 12 : 1. Для оцеики свойств двухскоростиого АД введем следующие обозначения: pj - число пар полюсов при последовательно-согласном соединении секций обмотки статора; рц - число пар полюсов при встречном соединении секций обмотки статора; pj = 2pjj; с> 2с, *2с - активное и индуктивное сопротивления секции обмотки статора и ротора (последние приведены к обмотке статора); (Од, (Одц - значения синхронной скорости, соответствующие ря рц, Шоп~2**оь /К I Л\ S N S I
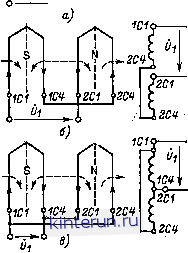 Рве 4.9. Принципиальные схемы включения секций одной фазы обмоткн статора, обеспечивающие изменение числа пар полюсов. Учитывая, что допустимый ток в секции обмотки статора /хдоп = /щом остается неизменным при переключении числа пар полюсов, можно записать: для схемы рис. 4.9, а для схемы рис. 4.9, б П1доп 1иом Pni; для схемы рис. 4.9, в П2доп-=ЗУх2/ С08(р 2. Из полученных выражений следует, что при переходе от схемы рис. 4.9, а к последовательному соединению встречно включенных секций по схеме рнс, 4.9, б допустимая мощность на валу двигатели остается неизменной Pi доп = Pji ,до (cos (pi cos фц ,), тогда как при переходе к параллельному соединению встречно включенных секций по схеме 4.9, б эта мощность практически удваивается 112ДОП 2Pj {сощ J 2 cos ф,). При этом допустимый момент на валу двигателя M,oa = = Ядоп/шо в первом случае с увеличением скорости уменьшается вдвое 2 1яоп. Л1П оп а во втором случае остается неизменным Л И2доп=**Л1,д . Таким образом, в случае уменьшения числа пар полюсови соответственно при увеличении скорости и прн последовательном соединении секций регулирование скорости осуществлиется с постояииой допустимой мощностью иа валу двигателя (рис. 4.10, в).  Рис. 4.10. Механические характеристики АД при регулировании скорости изненеииен числа пар полюсов путем изменения схемы включения обмотки статора в случае перехода от согласно-последовательного включения секций к встреч-ио-последовательнону (а) и встречио-параллель-вому (б). а при параллельном соединении секций имеет место регулирование с постоииным допустимым моментом (рис. 4.10,6). Прн последовательном соединении секций независимо от числа пар полюсов значения сопротивлений в схеме замещении двигателя остаются неизменными. Отсюда следует, что не меняется критическое скольжение, т. е. Sjj - а критический момент в силу изменении синхронной скорости сии-жаетси в 2 раза при переходе к встречному включению последовательно соединенных секций (рис. 4.10, в). Из данного положения, в свою очередь, может быть сделан вывод о Том, что в рассматриваемом случае при регулировании скорости сохраниется одинаковая перегрузочная способность АД (рис. 4.Ш, в) h = Лк1/Л<1 дои = Л11 п/ЛШдоп = 111. Qi связи с увеличением напряжения, при- Таккаксэдц - 2(ащ,то Allj2 - 2Mj, ложеиного к секции обмотки статора прк В рассматриваема случае допустимый включении по схеме двойной звезды, уве- момевт остается неизменным, в связи с чем личивается и ток холостого хода секции, получеяиое соотношение позволяет сделать всвязисчемсоз ф <cos фд.Эгообстоятель- вывод об увеличении вдвое перегрузочной ство позволяет считать Р., Р .т.е. инш пра1\с.?инени регулнроа1£ие скооти при постоянстве допустимой мощности АД. ifcS 4 10 /П в У критическое скоЛьжеине н\ибо1ьшее npeilenHe получили схемы ГциГкХтоГиеСеи ГГГк переключения обмоток -статора, приведенные \ У1° но измя oL на рис. 4.11. В схеме на рис. 4.11, о обмотка прежде, - \jj,no изменяется соотноше- ике критических моментов. Действительно, для срединеиия по схеме двойной звезды критический момент определяется как кхх~ - МЛ2,тогда как для соединения по схеме треугольника напряжение следует увеличить в раз, т. е. Тогда с учетом соотношения cojj =2Юо Отсюда следует, что увеличение скорости в 2 раза при переключении обмотки статора по схемам треугольник-двойная звезда ff* Х связано с увеличением перегрузочной спо- гдпк anoire ягХ собности двигвтеля. Действительно, ТЭК как ИЗ &I5ZIZK5WZ о>9 условия Р. Р,. следует Af Я 6} Л1д,/2, то Рве. 4.11. Распроетравеввые схемы переключе- %.,<4К/3. ятя обмоток статора длв вамеиенвя числа пар паиюсор. Механические характеристики АД при а ш- аяездв - даоЯвад авезда; б - треугольнвк - переключении обмОток статора по схемам явойвав звезда. треугольник - даойная звезда показаны иа рис. 4.12. статора переключается]по схеме звезда-двой- Оценивая рассмотренный способ регули-яая звезда,Что соответствует переключениям ротания скорости АД, следует отметить про- по схемам рис. 4.9, а и в, т. е. регулированию стоту его реализации и отсутствие больших скорости с постояииьш моментом. Механи- потерь скольжения, что было характерным ческве характеристики этой схеша приведены для всех ранее рассмотренных парамётриче- иа рис. 4.10, б. В схеме рнс. 4.11, 5 переход ских способов регулирюания скорости АД. or ссяяасно-посдедсжательного соединения Отсюда относительно высокие технико-эко- жсщяй в схеню треулхяьника к ветречио-па- ноишческяе показатели данного способа ре- радяедьиому их соединению в схеме двойной гулирования скорости. Основным же его не- 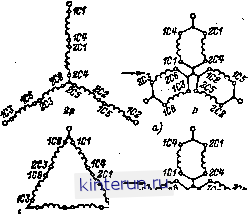 При параллельном соединении секций звезды связан с уменьшением в V3 раз напря- изменяются параметры схемы замещения: жения, приложенного кфазе обмотки статора, ти паяедовательиом соединении секций Если принять, как и раньше, фазное напряже- °11 *ic *к1 ° 2 *1с I *2с) ~ 2 *к.с; иие питакмдей сети равным Ui, то для схемы /?21 2/;2с> а при параллельном соединении треугольника напряжение, приложенное к 1112 = ic/2; сП2 = к с/2; *ii2?= ?2с2- двигателя, равно UiVs. При этом до- Критическое скольжение остается неиз- пустнмая мощность тогда как в схеме двойной звезды она выра-Зиачевия критических моментов определяют- асается как ся по формулам: .
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


