
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода клонение скорости от заданного значения при возможных изменениях момента статической нагрузки, обычно принимают зону изменения момента статической нагрузки от О до (1,5-2) Afc где - расчетное зиачение MoMeriTa статической нагрузки. Если при этом известно, также минимальное значение модуля жесткости механической характеристики, то нижний предел скорости может быть определен как <атгя=Л1с/1Р1тгя. откуда следует, что расширения диапвзоиа регулирования путем снижения нижнего предела скорости можно достигнуть повышением модуля жесткости механических характеристик электроприводов. Диапазон регулирования при более жесткой регулировочной механической характеристике 2, например, ив рис. 4.1 выше, чем при характеристике /. Плавность регулирования характеризуется разностью двух последовательных значений скорости, представляющих собой ступени регулирования. Чем меньше эта разность, тем более плавно осуществляется регулирование. Часто для оценки данного показателя вводят понятие коэффициента плав-иостя регулирования, под которым понимается отношение двух соседних ступеней скорости Фй) = <>> <>>/-1. где ш;, - значения скорости двигателя на i-й и I-1-й ступенях регулирования, причем ш; > u); i; lim (рщ=1. Плавность регулирования скорости определяется рядом факторов, связанных с технической реализацией способа изменения па-рвметров электрических цепей. В большинстве случаев оиа завксит от мощности электрической цепи, параметры которой изменяются с целью регулирования скорости. Регулирование скорости путем изменения сопротивлений в главных цепях двигателей средней и большой мощности обычно осуществляется с помощью коммутирующих аппаратов, число которых должно быть ограничено. При этих условиях регулирование скорости оказывается ступенчатым, так как снижение коэффициента плавности приводит к увеличению числа коммутирующих аппаратов. Если же для регулирования скорости следует изменять параметры цепей относительно малой мощности, то, как правило, нет необходимости в специальных коммутирующих аппаратах, а возможно использоввнне проволочных ползунковых реостатов либо полей резисторов с большим числом выводов, когда коэффициент плавности регулировании сопротивления близок к единице. В некоторых случаях принципиально невозможно осуществить плавное регулирование скорости, например при изменении числа пар полюсов асинхронных двигателей. Направление регулирования - вверх или вниз от основной скорости зависит от способов регулирования. Выбор способов регулирования и обеспечение требуемых показателей влияют на значения допустимых нагрузок на валу электродвигателя, которые в свою очередь определяют потери энергии, выделяющиеся в виде тепла в обмотках двигателя. Нагрев обмоток ие должен превосходить допустимую температуру (см. разд. 5). Экономические показатели регулирования оцениваются по капитальным (для установки соответствующего оборудования) и эксплуатационным затратам. В ряде случаев капитальные затраты могут быть оценены косвенными методами, например по установленной мощности электрооборудования. При этом последнюю обычио относят к установленной мощности электродвигателя. Иногда помимо стоимости электрооборудования бывает необходимо оценивать также его массу и габариты. Эксплуатационные затраты, как правило* оцениваются косвенным методом, главным образом, по энергетическим показателям: КПД и коэффициенту мощности при регулировании скорости. При этом в тех случаях, когда в течение рабочего цикла устанавливается ряд скоростей двигатели, следует от)еделять средние за этот цикл значения КПД и коэффициента мощности. Если же для механизма является равновероятной любая скорость в заданной зоне регулирования, то более удобно определить средние в этой зоне значения КПД и коэффициента мощности по общему правилу интегральной оценки средних значений переменных величин. В общем случае КПД и коэффициент мощности являются функциями угловой скорости т] (ш) и cos ф (ш), и их средние значения определяются по формулам: * Т] (Ю) Л ; (4.4а) С08(Рср = J > соз(р(ю)<2ю. (4.46) mtn 4.2. ПАРАМЕТРИЧЕСКИЕ СПОСОБЫ РЕГУЛИРОВАНИЯ 4.2.1. Резисторное регулирование скорости апектропрнводов Регулирование осуществлиется путем изменения сопротивлений резисторов, включенных в главные цепи двигателей - якорей ДПТ, статоров или роторов АД. Способы ре-зисторного регулирования скорости ДПТ и АД имеют много общего, а именно: регулирование скорости в двигательном режиме производится только вниз от основной скорости; модуль жесткости механических характеристик уменьшается при снижении угловой скорости, а потери мощности в главной цепи при этом растут; диапазон регулирования ограничен; во всех случаях, кроме регулирования скорости АД изменением сопро- тивлеиия в цепи статора, допустимый момент нагрузки практически можио считать постоянным. Но вместе с тем существуют и специфические особеиности регулировочных свойств каждого из двигателей. Резисторное регултование скорости ДПТ. Схема включения ДПТ НВ, регулируемого с помощью реостата в цепи якоря, представлена иа рис. 3.1. Регулирование скорости осуществляется путем измеиения Гдоб. Все остальные параметры схемы остаются неизменными. В частности) остается иеизмениьш и ток возбуждении, а значит, и поток воз- На D влияет внутреннее сопротивление двигатели - с увеличением Яя* дяапазонье-гулирования уменьшается. . Часто вместо минимальной жесткости характеристик задают иаибольшее отклонение момента статической нагрузки Д M.gon, приводящего к остановке ДПТ. В этом случае (l--R .)(l+AiMc.,on.) ДЛ1с. доп. (4.7) Обычно ДМс, буждения ДПТ Ф = Фнои- Если считать, (3 2) (1-ЛяЛ- При условии Мс - = const диапазон регулирования обычно не превосходит 2-2,5. При Мс = const мощность, потребляемая из сети, также остается постоянной 0,5 -ь 1, тогда D что для всех значений скорости допустимым по условиям нагрева током якоря является его номинальный ток, т. е. /ядоп = яном. то допустимый момент при регулировании скорости равен: Л1доп = М>ноия, доп =° = *Фноы/я.нои = Л1нои- (4-5) При ребстатиом регулировании скорости допустимый момент иа валу ДПТ не зависит от скорости и равен номинальному значению. Регулирование скорости возможно только вниз от основной. На рис. 4.3 представлены Естественная (R -0)  Рис. 4.3. Мехаинческве характервстяки ДПТ НВ при реостатном регулированви (Д яа п я > п,я >- механические характеристики ДПТ при реостатном регулировании скорости. В двигательном режиме они все лежат ниже его естественной характеристики. По мере снижения момента и а валу ДПТ реостатное регулирование скорости становится малоэффективным, а при М О из-, меиеиие сопротивления в цепи якоря практически не приводит к изменению скорости. Диапазсн! регулироваии скорости ограничен. В тех случаях, когда задано значение минимального модуля жесткости механических характеристик I Р U, . наименьшая скорость при иомииальиом момеите ва валу 1 Мной \ . ... Р !mi/t-1 ® Bte= el -r-rs-r- о--- : Р* \min Наибольшая скорость, соотаетствующая естественцой характеристике. -во(1-Яи.)-©,-11. Отсюда IP tmta -1 lPe.1 Рс = fc/s = WftM = const, тогда как механическая мощность его - - шМ снижается с уменьшением скорости, а потери мощности возрастают пропорционально падению скорости ДРэл ~ ДшМ, При регулировании скорости (М = const) Т)(<0) = (4.8) Среднее значение КПД в заданном диапазоне регулирования может быть определено из (4.4а) при подстановке в него (4.8) Яср = Ч±1. 2D (4.9) где Те = - КПД при заданном значении момента и работе двигателя иа естественной характеристике. При реостатном регулировании скорости ДПТ ПВ и ДПТ СВ также изменяется добавочное сопротивление в. цепи якоря. В этом случае основные показатели регулирования остаются такими же, как и у ДПТ НВ. В частности, допустимый момент остаётся неизменным и равным иомииальвому в силу того, что при /я двигателей Ф = Фном = const. Из (3.16) следует, что при постоянном звачеиии момента зависимость скорости ДПТ ПВ и ДПТ СВ от сопротивлеиия цепи якоря яаляется линейной. Для построении зависимостей ш (V? ) при М - const можно воспользоваться естественной механической характеристикой двигателя и заиисимостью М (/я). С помощью последней при заданном М определяются зиачеиия 1 и сопротивления цепи якоря при ю = О по формуле i?e o = = UJl. Соответствующие построения показаны иа рис. 4.4. Значения скорости иа искусственных ре-зисториых характеристиках могут быть отфе-делеиы и расчетным путем при заданном токе In, если известна естественная характеристика. При этом пользуется формуаа (3.18). Анализ зависимостей ш(/?я), представленных иа рис. 4.4, поКйзывает, что при малых значениях момента реостатное регулирование ДПТ ПВ и ДПТ СВ неэффективно. Я.нов const поток Резисторное регулирование скорости АД можно осущесталять различными способами, а вменяю: регулировочные резисторы могут включаться последовательно с обмотками статора илн ротора; оиимогутбыть симметрнчны- Естественная 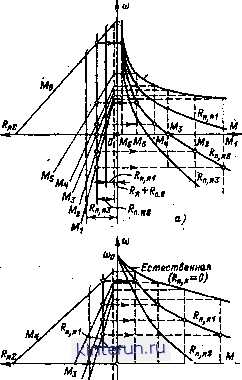 в щ Ms л\мГ Рве 4.4. К построению мехавииеских харак-ристнк ДПТ ПВ <а) и ДПТ СВ (б) воабуждення при реостатном регулировании скорости. ми, Т. е. одинаковьпкн во всех трех фазах ротора, либо несимметричными. Для АД с контактными кольцами применяется регулирование скорости путем изменения сопротивления в цепи ротора, как показано на рис. 4.S, а, а для АД с короткозамкнутым ротором используются сопротивления в цепи статора.- Прн включении симметричных сопротивлений в цепи ротора изменяется критическое скольжение, а критический момент остается неизменным. С увеличением Ri растет и критическое скольжение Sg (см. § 3.1.6) в.и/ к.е = ( + п)/ 5. (4.10) где Sg.e - критическое скольжение ва естественной характеристике. При постоянном значении. /J момент АД Af = const и ие зависит от сопротивления цепи ротора, а значит, и от скорости. В частности, при It = /5ио А доа=3/Гном/ >0=Л1 , Т. е. йрв регулировании скорости АД с контактными кольцами путем изменеиня сопротивления в цепи ротора допустимый момент остается постоянным и равным номинальному. 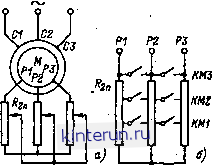 Рис 4.6. Схемы включенвя в цевь ротора плавно-регулвруеиых резисторов (о) я ступеней реансго-ров (б), переключаемых контактами. Для одного и того же значения тока ротора, а значит, в момента справедливо соотношение (4.11) где £{, S]] - значения скольжения прн заданном значении момента и включении в цепь ротора добавочных сопротивлений соответ-ствеиноЛ5 , и При реостатном регулировании скорости в случае постоянного момевта коэффициент мощности цепи ротора остается неизменным, ие изменяется и коэффициент мощвостн двигателя. В отличяе от ДПТ в рассматриваемом случае необходимо осуществлять регулирование сопротивлений одновременно в трех цепях. 5 означает, что при переключении 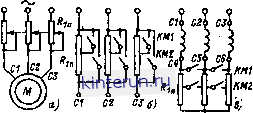 Рис 4.6. Схемы включения резисторов в цепв статора для регулирования скорости Адс коротко-вамкнутым ротором (а) при плавном намеиении б), прв ступенчатом иаиенеиив (*). ступеней скорости с помоии>ю контакторов ншбходимы аппараты, имеющие не менее Двух пар контактов (КМ1-КМЗ иа рис. 4.§, б). При введении симметричных добавочных сопротивлений Ri в фазы обмотки статора (рис. 4.6) будут уменьшаться значения
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


