
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Существенно лучшие динамические свойства имеет ЭПМ, конструктивная схема которой Показана на рИс. 3.145 [3.34]. Здесь ведущая часть 1 вместе с неподвижным катушкодержателем 2 образуют составной магнитопровод, а ведомая часть 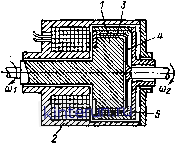 Рис. 3.145. ЭПМ с бесконтактным токоподводом и малоинерцноииой ведомой частью. выполнена в виде тонкого ферромагнитного цилиндра 3, соединенного с выходным валом магнитонзолирующен вставкой 4. Двухслойный зазор заполнен ферромагнитной смесью 5. Если при этом геометрия магнитной системы близка к оптимальной, обеспечивающей (при заданном моменте) минимальную инерционность массивного магиитопровода, использована сталь с повышенным электросопротивлением и низкоомная катушка, то подобная конструкция ЭПМ является наиболее подходящей для следящих систем. Во всех случаях, когда нет специальных ограничений, выгодно увеличивать момент инерции ведомой части, сохраняя неизменным отношение MIJ и параметры динамической характеристики. Характеристики. Так как ЭПМ во многих случаях используется при моментах ниже номинального, устанавливаемое значение момента оценивается по статической характеристике М (/) при Па = О, которая для ЭПМ является регулировочной. Статическая характеристика имеет вид узкой петли 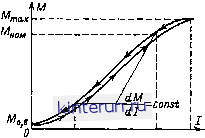 1иом 1нас Рис. 3.146. Механические характеристики ЭПМ. гистерезиса (рис. 3.146), формирующейся в результате магнитного гистерезиса и изменения концентрации ферромагнитных частиц в рабочем слое. Значительная (рабочая) часть статической характеристики практи- чески линейна (dM/df - const). В некоторых случаях (в маломощных исполнительных приводах) линейность результирующей характеристики М (/) улучшают дифференциальным включением двух следящих ЭПМ с противоположным направлением вращения ведущих частей [3.27, 3.34]. Механическая характеристика ЭПМ. Момент ЭПМ в широком диапазоне режимов не зависит от скольжения, вследствие чего ее механическая характеристика М (s) имеет почти нулевую жесткость при М (/g) = const и прн /в = const (кривая / на рнс. 3.147, а). Фактически характеристика несколько деформируется вследствие побочных эффектов - асинхронного момента из-за эксцентриситета ротора, центре-  Рис. 3.147. Семейство механических характеристик ЗПМ при различных зиачеииях тока возбуж- дения (/gj< < бежиых сил в смеси, медленного изменения концентрации (такназываемогопоследействня) и гидродинамического момента прн жидком наполнителе. Эти факторы приводят к отрицательной (кривая 2) илн знакопеременной (кривая <?) жесткости характеристик и, в частности, к возрастанию остаточного вращающего гидродинамического момента с увеличением скольжения. Механические характеристики ЭПМ S (М) при /в = const приведены на рнс. 3.147. Динамические характеристики. Естественная динамическая характеристика ЭПМ при включении на номинальное напряженне не имеет интервала запаздывания и полностью определяется электромагнитными процессами в цепи возбуждения и массивном магнито-проводе. Поэтому ее аналитическое выражение аналогично (3.60), но со степенью нз (3.76). Если V > £/ном и > . влияние дополнительного сопротивления учитывается, как в (3.60). При включении на источник тока характеристика в области высоких частот записывается в виде Мх(0 = Л1ном(Дг) (3.77) в области низких частот - в виде М (0 = Л1 о (1-Р,е ) , (3.78) Рэ = 0,7 + 0,8 (меньшее где T=*-J/r, Рэ - прн более длинных и толстых цилиндрических участках магиитопровода). Пере- ход от Ml к Mj осуществляется в точке пересечения /гп этих кривых. Абсцисса <го 0,46 Гв. Динамическая характеристика при отключении разрывом тока / 2 V \ Уп % ) (3.79) (3.80) где /го по-прежнему определяется условием 1 (Up) - 2 (гр)- Универсальная временная характеристика ЭПМ при питании от источника тока для = 1 приведена на рнс. 3.148. 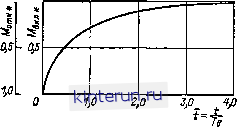 Рве. 3.148. Увиаерса льва я вреиеиня динамическая характеристика быстродействующей ЭПМ при питании от источника тока. Фазочастотная характеристика, построенная из (3.77), (3.79): 6 (со) =в-я/4 = const. ЛАЧХ, соответствующую функции (3.77), в виде прямой можно использовать как асимптотическую; при 1 она имеет наклон 10 дБ/дек н максимальную погрешность 1,2 дБ в точке шТв = 1. Л)1намическая характеристика ЭПМ прн импульсном управлении и форсировании напряжением £/ф > £/иом есть прямая [3.26] Л1(/)=Мном- (3.81) ta определяется по (3.65). При отключении с размагничивающим импульсом и, M(/) = Mb <п. (3.82) Характеристики (3.77) - (3.82) используются при исследовании ЭПМ в следящих проводах. Энергетические характеристики дл я ЭПМ определяются так же, как н для ЭФМ. Здесь ограничительным параметром является максимально допустимая температура рабочего слоя, прн которой последний длительное время сохраняет необходимые свойства. Зна-че.чия АР, а иногда и Ai приводятся в информационных материалах. Применение. ЭПМ применяются в качестве сцепных муфт нли тормозов в приводах большой мощности прн тяжелых пусковых режимах (в электроприводах буровых лебедок); весьма широко используются в на-грузочно-дннамометрических устройствах при малых и средних частотах вращения (различного рода испытательные стенды), в системах регулирования натяжения (текстильные машины, арматурно-навивочные машины), в различного рода исполнительных приводах (приводы антенн, рулевых устройств, лентопротяжных механизмов и т. д.) [3.32, 3.33, 3.40]. Применеане ЭПМ, развивающих моменты порядка десятков и сотен ньютонометров, является перспективным для следящих, регулируемых или адаптивных приводов и ознционных механизмов в станкостроении. 3.8.4. Зубчатые (кулачковые) электромагнитные муфты Зубчатая электромагнитная муфта (ЭЗМ) - электромагнитная муфта с механической связью, исполнительным органом которой служит пара деталей (венцов) с мелкими зубьями, расположенными на торцевых нли конических поверхностях. Конструкции ЭЗМ показаны на рнс. 3.149 и 3.150. Магнитные системы ЭЗМ отличаются от ЭФМ увеличенным ходом якоря. 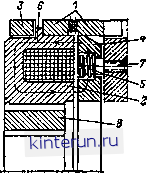 Рио. 3.149. Конструкция ЭЗМ с ковтактныммко-подводом. / - венцы с мелким торцевым зубом; 2 - корпус с катушкой; 3 - токоподводящее кольцо: 4 - якоры 5 - возвратные пружины; в - ковтур замыкания магнитного потока; 7 - болты подвески якоря: Яопорвая ввулка корпуса. необходимым для расцепления венцов. ЭЗМ имеет чисто релейные характеристики с запаздыванием t (рис. 3.151), определяемым соотношениями (3.58), (3.59). ЭЗМ не допускают проскальзывания. Вероятность включения тем выше, чем меньше скольжение, момент нагрузки и to и чем больше относительный размер впадины между зубьями (при данной форме зуба). Расчетные зависимости, определяющие условия включения, для ЭЗМ практически такие же, как в механических зубчатых муфтах. Отличие заключается в значении запаздывания, которое для ЭЗМ может быть сведено к весьма малым интервалам времени (порядка сотых долей секунды), и возможности днстанци№ного илн автоматического управления. Основными отличительными свойствами ЭЗМ являютси компактность, высокие удельные моменты и передача движения без скольжения. Поэтому они применяются длн включения низкоскоростиых передач при боль- 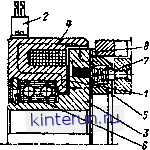 Ряс. 3.15D. Конструкция ЭЗМ с бесконтактным токоподводом. / - неподвихны& катушкодержатель; 2 - клеммы; 3 - опорный полюсный диск: 4 - контур замыкания магнитного потока; 5 - якоры б - подшипники; 7 - болты подвески якори с возвратными пружинами; 8 - зубчИтые венцы. шик моментах нагрузки; для точной коммутации кинематических цепей, не допускающих рассогласований по углу (в приборах, синхронных передачах и т. п.); дли включения неподвижных передач с последующим разгоном двигателем нлн ЭФМ и т. д., т. е. в качестве раздаточных муфт; для переключения передач с высшей скорости иа
Рис. 3.151. Дивами-ческаи характериствка ЭЗМ низшую (в момент, близкий к синхронизму на низшей скорости); совместно с ЭФМ, играющей роль синхронизатора (в случаях, когда основваи нагрузка прикладываетси по окончании переходного процесса); для аварийного ограничения момента отжимом зубьев и отходом якоря (с автоматаческой подачей команды на останов или расцепление). Примерная зависимость передаваемого момента и запаздывания от габаритов для современных ЭЗМ приведена на рис. 3.152. ЭЗМ могут применяться в С1азываемых н сухих уздах. Прн встройке ЭЗМ рекомендуется изготавливать сопряженные детали из магнитоизолирующих материалов, исключая прямые потоки рассеянии через вал механизма, шунтируюпше рабочий зазор; точно выдерживать зазор между венцами и тша- гельво моитнронать рессорные винты. Выбор ЭЗМ. При предварвтельном включении ЭЗМ илн параллельном соединеинн с синхронизирующей ЭФМ должно удовлетворяться условие где Мщ х - опрокидывающий момент двигателя или передаваемый момент ЭФМ. Прн включении иа ходу M >Ms нагр где Мдв - ограничительное значение движущего момента иа ведущей части ЭЗМ М,Н-м 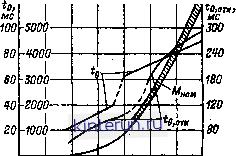 Эти характеристики свойственны и муфтам тфшы ЭЗМ, осваиваемым в 11-й пятилетке. . 40 80 ш ISO го О гчол,мм Рис. 3.152. Примерней заввсвмость номяналь-иого момента в запаадываннн прн включения и отключении ЭЗМ от габаритного диаметра муфты. (т. е. меньший из максимальных моментов двигателя или последовательно вкл09еииых ЭФМ); vWaarp - наибольшее зиачение момента нагрузки. Прв аварийном отключении на уровне Mj Л1вз sMq< Значение М может отливаться от номинального, из-за увеличения остаточного зазора или понижения удержнвакнцего иапряження; влияют также погрешности монтажа. 3.8.5. Электромагнитные муфты скольжгаия (ЭМС) При рассмотрении принципа действия электромагнитных муфт скольжения (как и других муфт со связью через поле) их удобно представить а виде вырожденной системы генератор - двигатель переменного тока, в которой отсутствуют статор генератора, линия электропередачи и статор двигателя. В результате взаимодействия тока ротора (якоря) муфты с потоком вращающегося индуктора создается момент, увлекающий ротор в направлении вращения поля. Основными факторами, существенж) вли-яюоонми иа конструкцию ЭМС, являются способ тркоподвода и расположеняе полюсов иа индукторе. На рис. 3.153 приведева схема класс1ика1щи ЭМС.
|
|||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


