
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода §3.2] Преобразователи электрияеской энергии 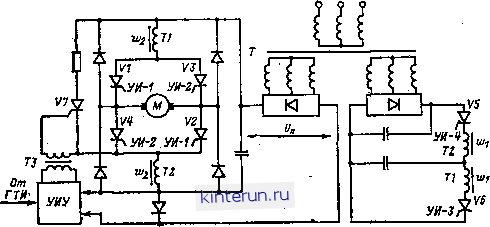 Рис. 3.94. ИУМ с поочередным способом коммутации. гулируемой скважности; поочередный, при ш>тором иа яш>ре двигателя обеспечиваются однополярные импульсы регулируемой скважности, работающая пара ключей замыкается одновремеино с частотой коммутации цепи якоря, а выключается поочередно с частотой, в 2 раза меньшей. При симметричном и несимметричном способах коммутации ток якоря двигателя имеет непрерывный характер во всех режимах работы. Однако по энергетическим показателям предпочтительно применение поочередного способа коммутации, где пульсации тока Я1юря вдвое меньше, чем при симметричном, а потери ва коммутацию значительно ниже по сравнению с иессимметричвым способом (здесь пульсации тока те же), так как выключение тиристоров осуществляется с частотой, вдвое меньшей по сравнению с частотой коммутации цепи ихоря. На рис. 3.93 в качестве примера приведена структурная схема реверсивного электропривода, в котором СВП работает на основе схемы с поочередным способом коммутации (рис. 3.94). Диаграмма работы ИУМ представлена на рис. 3.95. Импульсы иа включение рабочих тиристоров Vl и V2 (или V3 и в зависимости от выбора направления вращения подаются одновременно в моменты времени / 4 + Г с выхода УИ-1, УИ-2, т. е. в моменты сравнения сигналов тактового генератора aj-jH и Иу иа входе пороговых устройств. Импульсы Uyar на включение тиристоров V5 (ы,) или V6 (Мувт) устройств выключения рабочих тиристоров подаются с выходов УИ-3 или УИ-4 поочередно в моменты времени tu h + 27 , или 4 + Г ti -h. STg, т. е. частота принудительного выключателя работах тиристоров в 2 раза мен1ше частоты тактовых импульсов Т. Нафяжение питания 6 подается иа двигатель М только при одновременном включении рабочих тиристоров {VI, V2 или V3, V4). Торможение двигателя осуществляется иаменеииам полярности напряжения ва вы- водах двигателя М посредством включения противоположной двигательному режиму пары рабочих тиристоров. Устройство токоограничения УТО (рис. 3.93) воздействует на входы пороговых устройств, прекращая ях работу. В этом случае на рабочие тиристоры не поступают импульсы и они закрываются от действия устройства выключения тиристоров. Однако включается тирястор V7 посредством управляемого импульсного усилителя УИУ. Для разомкнутой системы рассматриваемого примере электромеханические харакге- ULrrH ч XJ si чувт Чувг Ц-уя к к к к к к * 1 Г---1 f---1 I---1 f I---1 <---1 r-i ПППППП f Рис. 3.95. Дваграмма напряжений СВП. Характеристики алвмвгаов мектропришова СРайи;3 ристики ЭП имеют вид кривых /. 2, 3, представленных на рнс. 3.96. Эти характеристики построены при допущении, что сопротивление силовой цепи преобразователя постоянно 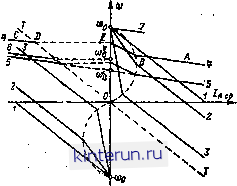 Рис. 3.96. Электромеханические характеристики реверсивного ЭП с ШИП. на всем периоде коммутации Гк. на оснюании следующих выражений [3.13]: в зоне непрерывного тока и (3.63) В зоне прерывистого тока. Здесь Yi - скважность импульсов; я.ср - среднее значение тока нагрузки; 1=11 Jr - ток короткого замыквиня двигателя; - полное сопротивление якорной цепн; с - постоянная давгатвли; 1 = О.б/кУк/Гя; 7j - электромагвитная постоянная времени якорной цепи двигателя. В замкнутой системе прн докущениях, что отсутсувурт зона, нечувствительности преобразователя и не действует узел токоограничения, характеристики двигателя ш = =П4.ср) принимают внд кривых, например 4, 5, построенных на сЛнованйи выражений [3.13]: В зоне непрерывного тока (например, участки АВ и -CD) /.(С+Мп) где fen- коэффициент усиления ШИП; - коэффициент обратной связи пО скорости; в области прерывистых токов (участок При /g, ср О получим m mj = Vylk, т. е. является скоростью холостого хода в двигательном режиме, при которой прекращается коммутация тнрнсторов. В то кр й функция ш = / (/j,ep) терпит разрыв. При этом ток двигатели меняется скачком до 1ель- /g,cp в точке D, которая лежит иа иой характеристике двигателя прн работе его в режиме противовключения, соответствующей 0. Уравнение этой-характеристики (прямая ТТ на рис. 3.96) согласно (3.53) следующее: /..срУп РеЬдязация характеристики ТТ невозможна, так как при ,f = О все рабочие тиристор* закрьгш в / . ср = 0. При подходе скорости ш двигателя, работайщего в тормозном: режиме, к ш1 вновь мест ifeCTO .разрыв функции ш 5= /!(/ ер)- Ток якоря игателя . скаиком меняется до =*= О. В реальных системах для иадеивкй*-боты ЭП в характеристиках ШЖ1 предусматривается зона нечувстввтедьности, равная 2б, что приводит к отключению тиристоров в- двигательном режиме при скорости а вклк)ченне в тормозном режиме - при скорости < о саИ-Я/ (кривая биарясЛМ). Элекгромехаввчесхве характеркош давгатедя в ммкнутой свстсме щтуякртл-ияя в дзяеателыюм р 1шме огранвтанн. рактеркбтвюй (кривая 7 ва ряс.1д6).1фн у ° 1, ураввеяве для которой вюет- вяд: При поочередвш способе коымутаюх механические характеристики привода нелинейны. Однако применением различного рода -обратных связей (как, например, по скорости в рассмотренном примере) эта иелвней-ность уменьшается. Примем нереверсивного ЭП с ткряе-торяым СвП служит схема, представлЭДЯвВ иа рис. 3.97, функциональная схема снспРШ 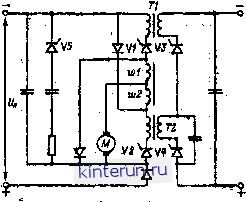 рас. 3.67. Схема тарпоторного СВП. привода приведена на рчс 3,98, а даагааима включекйй Тиристоров - на рис. 3.99. Регулирование сквджности ймпудьеов (примем Ymax < 1) и соответственно йЩрЯВ{вННЯ К якоре двигателя М осуществляется.в двигательном реяшме посредством рабочего гк ПреЬёрбаователй алектрической энергии ристора VI. Тиристор V2 служит для создания цепи динамического торможения М. На входе порогового устройства ШИМ осуществляется сравнение (рис. 3.98) опор- Рас. 3.9>. Бяок-ешм аеремрсвваого ШИП. ноп> напряжения иа с управляющим и - в результате которого ва выходе ШИМ Ш1яаля-ютед нмпульс4 вида С/ щи фис. 3,99). П1еднц& фронт имвульса служит для управ-лввия усилителем который BimreHaeiT Utwt,miit и и и и 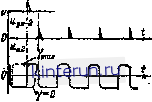 Рас. М- Двагимия аапижсввв СВП. VI. Выхдюченяе VJ происходит в яшца пе-пнсша Тк посредством мзята импульса ГТН torn. 3.98). Одйовреметво с выключе-ви 1 VI вцлючаАся V2 (усилитель при Y > 1 -< утаж- 1ри мвньвий снваяоюсп V V2 должен выключаться ясохальво раньше с цвшО соадания пауаы, ийкду моиеитои его вшнвочпвкя и паследуюв(вго вклкшнвя (равной подупепводу сосбственных холеба- я* УВТ). длистроцехавноескве характистихи ЭП при допущении, что сопротивления тиристоров и гтщя раяиы иудю л~ скорость ятчтя в течевне варкоаа кмутании неваменна, имеют вид кривых вв рие. 3.160, оострвенных ооуршиенкю (S.13}: о- -9 1 - со1кя-ивленйе цеаи даигателя. Характеристики параллельны естественной хараюервстинё даигателя, яоторая, од- нако, не может быть получена в силу условия Утах< Излом в характеристиках прК У; < 1 - Утах объясняется наличием зоны прерывистых токов в якоре двигателя. 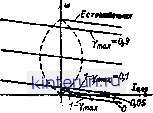 Рас. 3.100. Электромеханиче(кт характериствка иереверск йогр ШИП. Динамические свойства ШИП следует рассматривать совместно с цевью нагрузки, на которую он работает. С достаточной для практики точностью ШИП можно преаставить как безынерционный элемент системы, особенно если постоянные времени силовой цепи РВП сув{вс 1 в8о выв отвода комиутв ции и воотояниая временя (дьтрш, вкбючев нъа, с nibsvo защиты от помех, неаяачшельва. Высказанное представлеиио4Ш4П В динвмикэ а большой сшюви удровцпю. 3 Ы1шутую систему автоматического рвг фв вняв даигателя с ШИП следует расематрювть как одну из разновидностей велвнвйвнх кмпудъ-свых систем. S.2.2. Прео(ааов8Тедя чветвш длв упрьвлеияя. асинхровяымн д№НГВ1алямв Регудир<и ание еюроетя асхнхровиого двигателя ввмшевиен ча лготн штювит напряжения является ванболее аноноынв* нын н 9ффектвв1ш. Ги чаетопкт рвгули-ровании скольжение машины нваааисимо от днаиааова регулирования поддержяввстся сравнительно небольшим, в пвтери в дшгап* ле невелик. В атом влучва ашххрейвмй электропривод не уступает электроприводу постоякеогр тока ни по отатичесхвм, ни по динамическим св(ствам. Если при этом учесть, что асин;фонный двигатель о коротко-замкнутым ротором в 1,5-2 ptafl легче и в 3 раза дешевле, чем аиалогичмб (ввгатель постоянного тока, то становится чевидной перспективное использования асинхронных электрощ>нводов с ча<лоТВым управлением. Первые системы ча<ого управления асинхронными двигат л мр базировались иа использовании элекгрямехаинческих преобразователей, в которайс- регулирование частоты выходного иапряясення связано с изменение с ороетя едаой яля вееюяькш вспомогательных 9Л к1>йяих маийя. Примером такого преобразователя может служить схема рис. 3.101. Qaa обеспечивает регулиш-BBBiee чкёти в щироком диапааоиё, однахц ее технвуо-кояомцческие показали невысоки; нрайне велика установленная мвпшость преобразователя (четыре вспомогательные машины на полную мощность); низкие КПД;
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


