
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Указанные системы электропривода об- Особенностью поршневых машин явля- ладают удовлетворительными регулировоч- ется наличие в кинематической схеме этих ными качествами, однако снижение КПД при- машин крнвошипно-шатунного механизма. 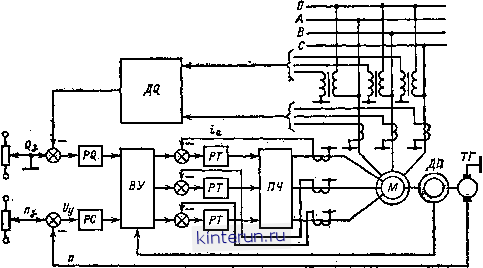 Рис. 19.16. Фуницноиальная схема системы регулирования машины двойного пнтання. Qj, Ig - иаиалы задания реактивной мощности и частота вращеиия; PQ, РС, РТ - регуляторы реактивной мсищвости, скорости и тока; ПЧ - преобразователь частоты; DQ - датчик реактивной мощности; ВУ вычислительное устройство; ДП датчик положеиня. Вода при регулировании ограничивает область их применения установками мощности не свыше 100 кВт [19.4]. 19.6. ЭЛЕКТРОПРИВОДЫ ПОРШНЕВЫХ МАШИН Важное место в народном хозяйстве занимают поршневые компресворы я насосы, а также плунжерные насосы. Поршневые компрессоры находят применение в производстве полимерных материалов, установках для разделения воздуха, холодильных установках и многих других. Поршневые и плунжерные насосы нрименяготся в производстве минеральных удобрений. Мошиость современных газовых поршневых компрессоров достигает 4000-5000 кВт, применяется также большое число относительно маломощных холодильных компрессоров до 100 кВт. Поршневые и плунжерные насосы имеют широкий диапазон мощностей от единиц киловатт до 500 кВт. Поршневые маншны, как правило, относительно тихоходны, причем с увеличением мощности частота вращения их меньше и не превышает обычно 500 об/мни, компрессоры малой мощности имеют более высокоскоростные двигатели с частотой вращения 1000 и 1500 об/мНн. Часто рабочий вал компрессора или насоса соединяется с двигателем посредством клиноременной передачи. Шкивы передачи выполняют в этом случае также роль маховиков. Момент сопротивления иа кривошипном валу механизма, создаваемый одним поршнем, не является постоянным, а представляет собой периодическую функцию угла поворота вала. Момент, Н-м, создаваемый поршнем одного цилиндра, определяется выражением Fr sinH + P) г,к,ц cosp где F - сила реакции поршня, равная F - PjuD/i, Н; г - раднус крнвошнпа, м; Лк,ц-КПД крнвошипио-шатуниого механизма и цилиндра; р - мгновенное значение угла между осями шатуна и штока; D - диаметр поршня, м; Рт-давление, развиваемое в цилиндре. Па; и - скорость вала, рад/с. Пренебрегая изменением угла Р, в первом приближении можно считать, что момент изменяется во времени по синусоиде. Для уменьшения пульсаций нагрузки поршневые машины выполняются, как правило, двух-нли многоцилиндровыми с соответствующим сдвигом кривошипов каждого из цилиндров. На рис. 19.17 показан характерный для двухцилиндровых машин график нагрузки на кривошипном валу за один его оборот. Для того чтобы пульсации момента сопромв-ления не вызывали соответствующих пульсаций момента, развиваемого двигателем, на кривошипном валу обычно предусматривается маховик либо применяется электродвигатель, обладающий большим моментом инерции ротора. Список литературы Момент, который должен развивать двигатель, можно представить при этом в виде суммы даух составляющих: постоянного среднего и переменного, зависящего от угла поворота кривошипа, значения момента инерции, угловой скорости и жесткости механической характеристики двигателя: X sin ш/ -arctg -), где А >- амплитуда колебаний момента (из графика моментов машины), Н-м; У - момент инерции, приведенный к валу даигателя, кг-м*; с = Мном/сонои НОИ - коэффициент жесткости мехаанческих характеристик двигателя.  О 60 IZO180 240300 350 Рнс. 19.17, Графнк нагрузки двухцилиндрового насоса двойного действии. Как Показывает приведенная формула, пульсации момента двигателя будут тем ниже, чем больше момент инерции привода и выше его частота вращения. Последнее обстоятельство следует иметь в виду при применении регулируемого алектропривода, так как степень неравномерности момента при снижении частоты вращения существенно возрас-таегг. Таким образом, наличие в кинематической Схеме поршневых мапган кривошипио-шатунного механизма и необходимость использования маховика или двигателя с повышенным моментом инерции определяют следующие особенности машин как объекта электропривода: пульсируюшлй характер нагрузочного момента, зависимость пульсаций от частоты вращения привода; повышенный момент инерции, затрудаяющий пуск привода; повышенный моментсопротивления при пуске. Вследствие низкого КПД кривошипно-шатунного механизма и большого сопротивления трения покоя в цилиндрах пусковой момент даже разгруженных поршневых машин должен быть не менее 1,2 номинального. Мощность, кВт, двигателя поршневой машины может быть ориентировочно определена как Р=1,15Л1срПно - 10- , где Мер берется нз диаграммы моментов за времи одаого оборота (см. рис. 19.17), Н-м. Для мощных компрессоров мощность даигателя следует определять более сложным способом - по среднеквадратично.\ у значению момента Р = 1.15М,фЛноы-10-2, Л1вф= В настоящее время для привода поршневых машин в основном применяется нерегулируемый электропривод: для машин большой мопйюстн - с синхронными даигателями; для машин малой мощности - с асинхронными короткозамкнутыми даигателями. Асинхронные даигатели, как правило, применяются с повышенным пусковым моментом. Для многих компрессоров разработаны синхронные машины Специальной конструкции (серии СДКМ, СДК. СДКП). Эти машины по электрическим параметрам и механической прочности рассчитаны на работу с пульсирующим моментом при тяжелых условиях пуска. Некоторые из модернизаций дангателей указанных типов имеют консольное исполнение ротора, при котором дангатель не имеет собственных подшипников, а его ротор насаживается на консольный конец коренного вала компрессора. Синхронные компрессорные даигатели выполняются как,в открытом исполнении, так и в закрытом, продуваемом под избыточным давлением. В последнем исполнении дангателн могут работать в условиях взрывоопасных производств. Для регулирования частоты вращения поршневых машин могут быть использованы различные системы регулируемого электропривода. Применяют для мощных компрессоров электроприводы с даигателями постоинного тока, питающимися от тирнсторных преобразователей. Весьма перспективно применение для этого вида машии асинхронных вентильных каскадов [19.1, 19,4]. Список литературы 19.1. Оинщенко Г. В., Юньков М. Г. Электропривод турбомеханизмов. - М.: Энергия, 1972. - 240 с. 19.2. Семидуберский М. С. Насосы, компрессоры, вентиляторы - М.: Высшая школа, 1974. - 232 с. 19.3. Степанов А. И. Центробежные и осевые насосы. - М.: Машгиз, 1960. - 463 с. 19.4. Иванов Г. М.. Онищеяко Г. Б. Автоматизированный злектропрнвод в химической промышленности. - М.: Машиностроение, 1975. - 312 с. 19.5. Местер И. М. Электропривод и автоматика вентиляторных установок главного проветривания. - М.: Недра, 1964. - 164 с. Раздел двадцатый ЭЛЕКТРОПРИВОДЫ МЕХАНИЗМОВ ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ 20.1. ОСНОВНЫЕ ТИПЫ МЕХАНИЗМОВ Характерными чертами химической промышленности являются ее миогоотраслевой ха1№ктер. высокая энергоемкость большинства производственных процессов и наличие спе-диальных требований, касающихси конструктивного исполнения электрооборудования в части заяшты от воздействия окружающей среды. К химической промышленности отно-сятси такие отрасли, как производство минеральных удобрений и шин, производство резино-техническнх изделий, синтетического спта и каучука, производство изделий из пластмасс и искусственного волокна, производство пленок и ианесение покрытий на ннх. Несмотря иа такое многообразие отраслей, для химической проиышлеяиостй, с точки зрения требований к автоматизированным электроприводам можно установить характер-иые классы механизмов и технологических агрегатов. При подготовив сырья для химической промышленности в дробильно-размольных цехах используют даобилки, мельницы, грохоты, вращающиеся печи, сушилки. В производстве полимерных материалов широко применяются червячные машины. Без них практически ие обходитси яи один агрегат или технологическая линии, предназ-иачеввые для получении изделий из пластмасс или резины, эти машины в подавляющем -Лольишвсхве случаев требуют регулировании скорости. К этому ясе классу мехаиизмов по своим требованиям к электроприводам можно отвести и резииосмесители, иескютря иа веюпорые технологические отличия в их работе. Д:фугими машинами, также широко примеияемымя в производстае полимерных материалов, являются валковые маишны: вальцы и каландры. Центрифуги служвт для раэделевия неоднородных жидких смесей на твердую и жидкую фазы под воздействием центробежных сил. Близкими к центрифугам по требованиям к электроприводам являютси перемешивающиеся устройства, спужапше для равномерного распределения твердой фазы в жидкости, смешении различных жидкостей с целью получения шульсии, а также для ий-, тенсификации процессов растворения и химических реакций. . Своеобразную группу механизмов составляют машины для производства и обработки искусственного волокна. Отличительной особенностью этих механизмов явлиется массовое применение высокоскоростных двигателей малой мощности, требующих источников переменного напряжения повышевиой частоты. Особо вахсиую роль в химической промышленности играют различные поточные технологические линии, позволяющие существенно повысить производительность труда. К иим можно отвести: корднью лииии, протекторные и автокамерные агрегаты, линии для получения искусственной кожи и транспортерных лент, агрегаты для иаиесе-иия покрытий на провода, кабели, стальнЬе листы и трубы, пленки; агрегаты для получения пленок различного назиачевии, тру€, листа и других изделий из пластмасс. Несмотря на различие технологических процессов, у механизмов поточных технологических линий много обишх требований к электроприводу. К отдельной группе мехаиизмов можйю отвести шиносборочные стайки. Для них характерен режим повторио-кратковршеяйой нагрузкв, причем частота включений даигателей может достигать 1000 в час. Таким образом, исходи из режимов работа, нагрузочных характеристик и других специфических требований к электроприводам, изо всех миогочислен1ШХ мапган и 1ю-хаиизмов химической промышленности моо выделить следующие основные группы: 1. Механизмы подаотовителшых iJesta. 2. Червячные машины и резиносывга-тели. 3. Валковые машины. 4. Мешалки, сепараторы, центриф]<ги. 5. Механизмы для производства ис1-ственного волокна. 6. Поточные технологические линия. 7. Шиносборочные стайки. Вопросы электроприводов мехаяикав, используемых в производстве искусствеЛЬх волоиои, и технологических линий в иасШя-щем справочнике не раюматриваются. СМйе-иви об электрооборудовании этих механиЙВов можно иайта в [20.1, 20.2]. В химических производствах исполаИву-ются тахже мяогочвслеявые и разнообраййые по коиструкциям транспортные механШш (конвейеры, транспортеры, питатели и т.Ф.), а также вспомогательные механизмы, вйи характерны ие только для химической,ч*но и дли многих других отраслей, в силу Што не носят специфических особенностей, # их электроприводы в иастоящем разделе Справочника каи отдельные группы мехаивмов ие рассматриваются. 20.2. УСЛОВИЯ РАБОТЫ ЭЛЕКТРООБОРУДОВАНИЯ НА ПРЕДПРИЯТИЯХ ХИМИЧЕСКОЙ ПРОМЫШЛЕННОСТИ. СПОСОБЫ ЗАЩИТЫ ЭЛЕКТРООБОРУДОВАНИЯ Химические производства обычно связаны с переработкой веществ, являющихся пожаро- и взрывоопасными, а также разру-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


