
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода где и - амплитудное значение фазиого напряжения питания СД; s = 1 - ш - скольжение ротора. Уравнении электрического равиовеога статорНых контуров в комплексной форме: -iO=-taXa{l-s)+lg[r +jsx]. Здесь комплексные реактивности +.9 получены из сем замещения (рис. 3.35, а, б): сверхпереходкое вндунтввное сопротивление продольного статорного ионтура; -сверхпереходное иидук-. щему веутору питак>щего напряжения; /d)*4-(Ini /(f); / л = Vl(Re/) -{-(Ira/,) . Таким о(азом, последовательность расг чета механической и электромеханической ха-paxtepitCTHK СД следуюиия: По схемам замещения СД рассчитывакися комплексные реактивности и Хд. Рассчиты- ваются комплексные токи и tg в функции скольжении и строятся электромеханические характеристики /i == / (i),. где /iKdBttw+Smo*.затем механическая характеристика Мер = / (s) и. зависимость области изменения амплитуды колебательной составляющей от скольжения Мдд / (s). Значение фазы колебательной состявдяющ момента используется при исследовшаях ре* жяма вхождения двигателя в синхронизм. . Расчет электромеханических и механи-. ческих характеристик существенно упроя(аег{ ся при пренебрежении активным сопротявлег, пнем статора, что вполне допустимо для крупных маиган, так как при < 0,02-0.03 ошибка расчета не превосходят 5%. Тогда. ta = 0/jxa; Ig = -U/Xg и составлиющие комплексных токов рассчитываются во ф(ф-мулам: l Re/d = тявное сопротивление тгоперечяого статорного контура. Уравненвя комплексиых токов / r /(2s-.l)+jig rj(2s 1) [Га-hls (id+iqi-W r(2s-l)-b/irf ra/(2s-1) lra+ls{id+i9)-idig] Выражение элёхтронагнитиого момента, развиваемого СД, получается из уравнения М = 4talg - gid, Щ которое при пренебрежении падением напряжения в активном сопротивлении статора подставляются сле-ду рщие соотношения: = ,; д = -ug; к та* cos (St - ф); г= Igmaxst - -фо). Тогда М~Мся+М, где Мер = а (IRe U + +1 Re/,1 а-постоян- пая составляющая моментагвазывг ая средним моментом; М. = а f(/rfm<M-/тл ) cos X Х.(25-ф}]/2-гармоническая составляющая момента, называемая колебательным моментон; Im/-Im/ . Ф=Fвгctg-;-.----фаза колебатель- Re/rfl -!Re/,l н(яо момента по отношеивю к изображаю- Вычислив значения постоинньос коэффи-. циеитов о *, с /, g. А, *, /, m, И и р перед переменной s, выражения составляющих токов можно записать в виде , as4-l-6s*-f-c , fs Itn/d Затем для разиых эначенкгй скольжения вычисляются средаий момент и амплитуда колебательного. Дри расчетах следует учитывать, что в роторную, цепь возбуждение период пуска включается обычно разрЯфйое сопротивление г/ pgap = (8 -s- 12) На J>i :., З.Зо приведена механичкая характеристика - зависимость от угловой скороста q)<Ml-иего Мер мом№га СД с нанесенное на иее о$ластыо ишкюнеивя амплитуды 1№1ебаз ль-иоА составляющей (заштриховано), ряссчи- §3.11 Электрические двигатели та&яавпо средним параметрам прн разрядном сопрогавлеинн в контуре возбуждеинв rfm т. е. rs = 10г. наличии в статориов кепи дополни-тельного активного сопротивления его значение суммируется с активным сопротивлением статора а прн включении в статорвую  Рнс 3.36. Механическая характеристика СД в асинхронном режиме. цепь дополиительиой иидуктивиоста (реактора, автотрансформатора) значение до-1юлиительного индуктивного лоп сопротивлении суммнруетсн с индуктивным сопротивлением рассеяния статорного контура х . Тогда *И( *Orf Ь *в -f- Xjqq; Хд = Хдд ПГ Хд XfQjg (см. табл. 3.4). Вхождение в синхронизм. При пуске двигателя без нагрузки возможно втигиваняе его в синхронизм без возбуждении под действием момента ввиополюсности. Пи наличии момента статического сопротивлеинв иа валу двигатели возможность вхождении его в синхронизм провернется расчетом, в основе которого лежит уравнение движении (заннсь в относнтельиых едвиицах) где Afe - момент статического сопротивле* ния на валу двигатели. Элехтромагиитиый переходный процесс в элехтромагвитиой системе двигателя при юдключеини его к сети обычно затухает, и момент М, развиваемый двигателем в точке, соответствующей равенству его моменту статического сопротивления на валу двигателя Ме.в определяется по статической механической характеристике (рис. 3.36). При включении обмотки возбуждении иа постояиное напряжение дангатель развивает сиихррииый момент Мсивхр = (в1пв)/. Гранки изменения момента и скольжеини двигателя в точке квазиустаиовив1Пегося движения При = Ме. невозбуждеииого СД приведены иа рнс. 3.37. Здесь же приведен график Меивхр = / (в) при наличии скольжения. Кривые 1-3 ввлвются гра{)иками изменении скольжении в фуккции угла 9 после подачи возбуждении. Наиболее благоприятным моментом подачи возбуждения явлиется энвчЁЯие угла 9 = О -f- 2яя, где я=: f, 2, 3... Ъ этом случае скольжение изменяется по кривой и СД входит в сйвХрб-ниэ в первый полупериод снихроинзнру-ющего момента. По охоичаини nepiexoeHorb процесса вхождеиив в синхронизм двигатель работает иа статической моментно-углобов характеристике с рабочим углом 9, обу- словленным моментом сопротивлеинв М Наиболее небдагоприятньш моментом вклзк>-чевин возбуждения является значение в = (2я--1) я, когда первый попупериод синхронизирующего момента отрицателей, сноль-жеиие увеличивается. В этом случае дангатель может войтв в синхронизм с большими ка- 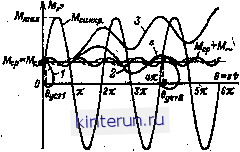 Рнс 3.37. Графики юиевення переиенннх СД прн педсвнхроввой скоросп. чаннями частоты скольжения (крвВаи 2) (рабочий угол в усга№>вивв1еыся режиме вуетг) или ие войти в синхронизм, увеличя-вая скольжение по кривой S. Наибольщее звцченве -скольжения, при котором происходит вхоясдение двигателя в синхронизм, определяется по формулам: моменте - ори 1ваяболее благопрнятаом включшая возбуж8Ш111 и - при наиболее небяагоприятнш моменте включении возбуждении. Проверка возможности втнгивання двигатели .в синхронизм производится дли наиболее неблагоприятного момента включения возбуждении, по устройства автомагаки, обеспечивающие- подачу возбуждения в ротор СД, ивстраявахуея иа подачу возбуждении в наиболее благоприятный тчащ, т. е. в я 0. . Статичеекие характеритшт синхронного реясима СД. В установившемся внфов-иом режиме даигтель опйс1ДийтсисВ(Стемой уравнений Восяхd, О(тавя. 3.4), в imopux следует положить равными нулю все яршэ-водице и юки демпферных контуров. В сии-хроином установившемся рехгаме с eig = 1; £ = *arf(o - ЭДС врвиюиин т тока возбуж?№ ив. В обацп* сяучйл эта завшямость устаЬавливаегся иаойнвмйгнВчиваввя. На рис.-3.38 тфиведеаа.аормальная xpMtepH-стика холостого хода для явиополюсных СД, построенная в отвоёитедьиых даяяцвх системы Хда при иеяйсыщеввом q>eABeM значении Хо 1,06. фоь хе приведена зависимость взаимной реахшвости по продольной оси Хда от тоха возбуж&еивя. Следует отметить, что реактивность рассеяния статорного контура % практически не зависит от насыщения, равно как и взаимная реактивность по поперечной оси Xaq-Поэтому можно прииить реактивность статора по продольной оси = Хаа Uf) + + *а = / ( ) а реактивность статора по поперечной оси Хд - хд -Ь *o = const. угловой характеристики рассчитываются по формуле 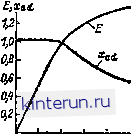 О 0,5 %0 1,5 2,0 If Рис. 3.38. Кривая намагничивания СД и зависимость = filji от тока возбуждения. Моментио-угЛовые механические характеристики СД при допущении Та = рассчитываются по формуле sin9-b 1 2 \ JC, Xrf sin 29. Первая составляющая зависит от возбуждения и рассчитывается с учетом кривой намагничивании £ = / (/у) в зависимости Xad == ( ) Втораи составляющая момента ие зависит от возбуждения и называется параметрическим моментом или моментом яв-нополюсности. Но при построении характеристики параметрического момента следует учитывать зависимость Xd-f {If)- Моментно-угловая характеристика СД приведена на рис. 3.39 (кривая 3). Здесь же приведены обе 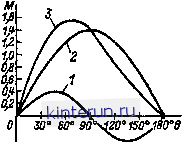 Рис. 3.39. Моментно-угловые характеристики СД. составляющие - зависищие от возбуждения (кривая 2) и параметрическая (кривая /). При использовании ненасыщенных значений Xad значение ЭДС Е следует брать по спрямленной характеристике намагничивания. Потребление из сети реактивной энергии и выдача ее в сеть в пределах момевтно- \ Xd sins \ UE I Xd cose. Здесь положительная составляющая соответствует потреблению реактивной энергии из сети, отрицательная - выдаче реактивной энергии в сеть. Кривые зависимости реактивной мощности синхронного двигателя СД от угЛа в прн различных ЭДС двигателя и х/х= 1,5 (ненасыщенные значения) приведены иа рис. 3.40. При расчете реактивной энергии сяе-  Рнс. 3.40. графики нэмененнн реактнвнса мощности СД. дует учитывать изменение ЭДС и х в функции тока возбуждения согласно рис. 3.38. Расчет характеристик СД иа аналоговых вычислительных машинах. В основу матеиа-тической модели СД положены уравнения СД в координатах d, q, О (см. табл. 3.4), записанные отиосвтельно высших производных. Схема математической модели СД включает в себя 15 усилителей (1-15) и 4 блока произведений (БП1-БП4) и представлена иа рис. 3.41. Схема модели питания СД в осях d, q, О при исследовании и расчете режима асинхронного пуска состоит из усилителей 1-6 и блоков произведения БП1, БП2 и строится по рис. 3.42, а. Здесь БПЗ, БП4 и сумматор 7 с поляризованным реле РП выполняют функции стабилизации амплитуды питающего напряжения. При расчете статических и динамических характеристик синхронного режима (наброс, сброс нагрузки) и исследовании компёнсируюи;1их свойств СДсхема его питания в осях d, q, О упрощается и имеет вид рис. 3.42, б. В качестве формирователей питающего напряжения здесь используются блоки нелинейностей БН1, БН2, у которых изменение входного сигнала 6 целесообразно в зависимости от характера решаемой задачи принять в пределах яА < 9 < я/2. Масштабы переменных зависят от пределов их изменения в реальной исследуемой машине. При использовании относительных единиц целесообразно принимать масштабы
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


