
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода причем потребляемая электроприводами мощность в большой степени зависит от текущей глубины бурения. С учетом этого мощность главных электроприводов должна быть сбалансирована таким образом, чтобы максимальная потребляемая мощность в режимах бурения и ШО была одного порядка и не превышала мощность источника энергии. Для упрощения производства и эксплуа-тащ1И электрооборудования целесообразно использовать одинаковые виды привода для главных механизмов и максимально унифицировать электрооборудование электроприводов. Весьма перспективными представ-ляютси технические решении, позволиющие унифицировать электрооборудование электрических и автономных установок одного класса, а также установок разных классов. В одинаковой степени к разным электроприводам относится рид конструктивных требований: климатическое исполиение электрооборудовании, исполиение по механическим воздействиям, способы монтажа, демонтажа и транспортирования н т. д. Возможность регулирования скорости дли всех главных механизмов дает определенные эксплуатационные преимущества. Для всех главных электроприводов диапазоны регулирования скорости не заданы жестко и должны определяться на основании технико-экономических расчетов. Решающим критерием выбора комплекса главных электроприводов является максимальная технико-экономическая эффективность для всей системы в целом. На стадии эскизного проектирования должеи проводиться укрупненный технико-экономический анализ вариантов привода, в результате которого принимается решение о виде привода, мощности главных механизмов, количестве основных агрегатов и двигателей и о системе электроснабжении (включая выбор напряжении источников электроэнергии и потребителей). Таким образом, при проектировании каждого в отдельности из главных электроприводов перечисленные параметры можно считать заданными. Технологические функции буровых насосов в случае роторного бурения состоят в создании потока промывочной жидкости (бурового раствора) через бурильные трубы к забою скважины и через затрубное пространство от забоя к устью скважины, что необходимо дли выноса от забоя на поверхность частиц разбуренной породы. В случае турбинного бурения промывочная жидкость, кроме того, приводит во вращение турбобур с долотом на конце, т. е. служит рабочим агентом для турбины турбобура. Необходимая мощность привода насоса при разных методах бурения различна. Однако, поскольку каждая буровая установка должна обеспечивать возможность бурения любым из указанных методов, мощность выбирается из условий турбинного бурения (так как дли роторного бурения требуется меньшая мощность) и составляет на установках различных классов от 300 до 1200 кВт иа одни насос. Номинальная частота вращения двигателя насоса составляет обычно 750- 1000 об/мин. Буровые насосы представляют собой насосы поршневого типа. Мощность двигателя определяется для основного расчетного режима, соответствующего наибольшему давлению насоса, т. е. наименьшему диаметру поршня. При других диаметрах поршня режимы работы насоса рассчитываются таким образом, чтобы мощность привода оставалась неизменной. Выбор вида привода и его характеристик должен производиться с учетом следующих требований и технологических особенностей работы: привод насоса нереверсивный; режим работы длительный с относительно спокойной нагрузкой; при регулировании частоты вращения вниз от номинальной привод должеи обеспечивать длительную работу при постоянном номинальном статяческом моменте (момент остается неизменным при любом диаметре поршня); жесткость механической характеристики привода должна быть такой чтобы статизм на участке от холостого хода до номинальной нагрузки был порядка 5 % номинальной частоты вращения двигателя; пусковой момент привода должен быть сравнительно небольшим, желательно иметь возможность плавного, затянутого пуска иасоса (до 60 с); максимальный момеит должен превышать номинальный не более чем иа 15- 20 %; скорость привода насоса в режиме бурения необходимо регулировать не менее чем на 20 % вниз от номинальной с целью наиболее полного использования мощности насоса при изменении гидравлического сопротивления в скважине. Во вспомогательных режимах (восстановление циркуляции раствора, промывка скважины) желательна работа привода на скорости 20-50 % номинальной. Эффективность, достигаемая регулированием скорости, резко возрастает с увеличением глубины скважины и усложнением условий бурения. Таким образом, требуемый диапазон регулировании скорости насоса тем шире, чем больше расчетнаи глубина бурения для данной буровой установки. Рекомендуется применять в зависимости от класса буровой установки для привода буровых насосов: для установок сверхглубокого бурении - глубоко регулируемый электропривод по системе Г-Д или УВ-Д; для установок глубокого бурения - электропривод с регулированием скорости иа 20-50 % вниз от номинальной на базе АД с каскадными схемами регулирования; для прочих буровых установок - нерегулируемый электропривод или привод с возможностью небольшого снижения скорости (до 10-20 %) и плавного пуска, например привод с АД и электромагнитной или гидравлической муфтой. Буровой ротор предназначен дли приведении во вращение колонны бурильных труб. При роторном бурении это необходимо непосредственно для вращения долота, при турбинном бурении - дли вспомогательных целей. Необходимая мощность привода ротора на установках различных классов составляет от 75 до 400 кВт. Стандартами иа буровые установки регламентируются мощность и номинальный можнт на вращающемси столе ротора, а пв максимальная частота вращения (лри малых нагрузках) и максимальный момент (при нулевой частоте вращения). Выбор вида привода и его характеристик должеи провшодитьси с учетом следующих требоваита н технологических особенностей работы: привод ротора необходим реверснв- ный, в основных рабочих реяшмах ротор должен вращаться в о%ном (прямом) направлении, обратное направление вращения необходимо только в некоторых вспомогательвых режимах, поэтому допустим реверс путем оперативных переключений с кратковременным па>ерывом питании; режим работыдлительный, причеммомевтнагрузки можетбьпъ постоиииым или колебаться в иекотсфых пределах (вплоть до махсималыюго); при регулир( аяии частоты вращения ввяа от номинальной привод должен обеспечивать возможность жлительиой рабош при номинальном моменте нагрузки, вверх от номинальной - при постоянной номинальной мощвости, ойнахо практически привод ротора работает прк меяьошх юненте и мощности, в свизи с чем автоматическое обеспечение указанных законов регулирюания ве тре- . буеки: пусковые характеристики прввода ие регламентярукпся, необходимо лишь, >по-бы момент иа ротвре не превышал максимального, которьш составляет обычно 1,5-1,6 номинального; требуемый статизм механической характеристяки в пределах ном-вадьиой ншрузхи должш бьпъ не более 5-10 % номинальвой частоты вращения; требовании к плавности регулирования частоты вршцюии зависят от расчетной глубины бурения - плавное репглироваиие веобхо-днмо ва установках jflytexoro бурения, а на прочих устанюхах. допустимо ступенчатое .язмшение частоты вращения; спе1щ>ическим является требование ограничении момента инерция привода. РЬтор приводит во враосе-кие длинную упругую колонну труб. Ддя -уменьшении динамических нагрузок в трубах при заклинивании доиюта привод должен иметь вошокво мшьпшб момент ииерции. Рекоыеидуетси применять в зависямоети от класса (р(Ж>й установки дли привода ротора: для установок глубокого и свх-глубокого бурения - глубоко регулируе)шй электропривод ротора по скстеме Г-Д или УВ-Д: для прочих буровых установок-нерегулируемый электропривод со ступшча-тым измевением частоты вращения ротора с помощью механической коробки передач, возможно тахже применение группового привода ротора от трансмиссии буровой лебедки. Буроваи лебедка предназначена цля подъема и спуска бурильной колонны, нроизво-Вимых нериодачесхи для замены породораару-шающего долота. Выбор мхициостя прюода лебедки определяется техихко-экоиомичес-хя1ш соображениями, однако рАзвиааемая првводсм мощность должна быть, как правило, ве мшее регламентированной ставдар-тамн (17-lf 17>2}. На установках рваных классов установленная мощность 1фивода лебедки составлиет 250-2500 кВт. Выбор вида прввода и его характеристик должш провшодитъся с учетом следующих требований и технологических особеинобтей работы лебедки в режиме подъема. 1. Режим работы привода - повторйЬ-хратковремениый. При подъеме колонна рас-члетяетси иа отдельные отрезки - свечи (длиной 25-37,5 м каждаи), которые поднимаются последовательно одна за другой с паузами, необходимыми для выполнеяяя вспомогательных операций. Отиосительная ПВ срставляег в средвем 30-40 %, длительность одного цшсаа 1,5-Змии. Перегрка двигателя по току в рабочем периоде прн-мается обычно равяоя 1,2-1,3 номинального тока. 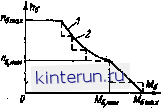 г.. Рис. 17.1. Статические харектервстнка алектро- ирввояа буроаоА лебедка д режшм ясяъема. / 1- втя регулируемого привода; 2 цпя вере-гулируейого привща. 2. Реверс дангателя в Ьсвовяых рабдчвх режимах требуется, оя необходим ioia>eo в редких вспомогательных режимах н мх№г осуиюсталятьси иутем оиератившах перетаао: чшвй. Если двигатель используется также в качестве тормозной мжшны н atlet колонны, то привод должен быть рекрсШам в смысле измшення знака скорости, оввйр статический момент нагрузки опредвяяйЫ протягявшяшш грузом н не мшяет яИИЫ, т. е. привод работает в I н IV квадраяйх. 3. Электропривод лебедки может быть ретулируемым и нерегулируемым (мехайи-ческие характеристики показаны на рнс.17.1, кривые соответствевво / и 2). Желагейьно возможно более полное испоаьзованне нУЦ-ности привода прн измеяеаяк MOMeHta Ba-грузки в широких преявдах (ао 20:1), поэтому характеристика привода бьпь близкой к 1фивой постоянной! При нерегулируемом приводе это с помсяцью механической коробки перДвч. диапазой регулирования скорости 4. Привод должеи иметь тахие пусксяые характеристики, чтобы обеспечивался плавный, но достаточно интиюнвиый tpk лебедки. Значение максившХьиого двигателя должно иаходяться в 1,8-2,2 номинального момента. 5. Жесткость механической xapaKrepjMb-тнкн доляша быть такой, ггобы статизм -иё превышал 5-8 % иомииалшой частоты вращения. Прн регулируемом приводе формн- руется обы<шо экскаваторная механическая характеристика. 6. Привод лебедки должен обеспечивать остановку крюка талевой системы с точностью ±(30-40)мм, что соответствует 0,05-0,15 оборота вала двигателя (в зависимости от педаточного отношения между барабаном лебедки и валом двигателя). 7. На установках глубокого бурения привод лебедки должеи быть двухдвигатель-и; по соображениям резервирования, причем максимальное расчетное усилие на крюке должно обеспечиаатьря при работе одного двигатели. Рекомендуется применять в зависимости ох., класса буровой установки для привода ЛеЙедки: дли установок глубокого и сверхглубокого бурения - глубоко регулируемый электропривод постоянного тока по системе Г-Д или УВ-Д, редукториый илн безредук- -. торный с аварийной механической передачей в зависимости от ряда дополнительных требований; для прочих буровых установок - нерегулируемый электропривод с обеспечением плавного пуска (АД с фазным ротором, синхронный двигатель с электромагнитной муфтой) и со ступенчатым регулированием сксфости подъема с помощью механической коробки передач. Система торможения буровой лебедки должна воспринимать энергию, развиваемую бурильной колонной при спуске в скважину, и обеспечивать регулирование скорости.йпус-ка в заданных пределах. Дли этой цели могут быть использованы электрические машины различных типов, в первую очередь - специально создаваемые для этого электромагнитные тормоза индукционного нли порошкового типа. В ряде случаев возможно использовать в качестве тормозных машии приводные двигатели лебедки. Мощность тррыоаяой машины иа установках разных классов составляет от 200 до 1500 кВт. Действующими стандартами 117.1, 17.2] регламентируются скорости спуска колонны номинального веса и иезагруокеииого талевого блока, остальные параметры выбираются при проектировании. Выбор вида тормозной машины и ее харчрернстик должеи производиться с уче-тед йедующих требований и технологических особенностей работы лебедки при спуске колонны: . ,\, Режим работы тормозной системы - повгарио-кратковремеииый, приблизительно тащЩе, как дли привода лебедки в режиме подм ?а. , % Основное направление вращения соответствует спуску колонны, однако тормозная машина должна допускать вращение и в обратном направлении. Если в качестве тормоз-машины используетси приводной двигатель, .то он должеи при спуске работать а IV квадранте, в режиме динамического или рекуперативного торможения. Последний способ допускается йа установках, получающих питание от электрической сети. 3. Диапазон регулирования скорости спуска вверх от номинальной достигает 2:1. Весьма желательно получение малых скоростей спуска вплоть до нулевой, однако допустимо принимать минимальную скорость порядка 0,3 номинальной. Желательно наиболее полное использование мощности системы торможения, поэтому зависимость скорости спуска от момента нагрузки при скорости больше номинальной должна быть близкой к кривой постояииой мощности. Характеристики системы иа примере системы с электромагнитным индукционным тормозом показаны на рис. 17.2. 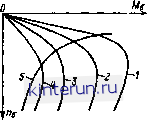 Рнс. 17,2. Статнческве характеристакн системы торможення буровой лебедка с электромагнит- вым иидукдиоииын тормозом. 1-4 - механические характеристики тормоза при разных токах возбуждения (/bi > /Hi > /Bj > > iB,); S - оптимальная кривая )егулирования скорости спуска прн постоянной мощности. 4. Система торможения должна обладать запасом тормозного момента порядка 1,5 номинального зиачеиия для обеспечении достаточно иитеисивного замедления. 5. Требовании к точности остановки те же, что и для привода лебедки в режиме подъема. Рекометдуется применять в зависимости от класса буровой установки системы торможения: для установок глубокого и сверхглубокого бурения - системы с использованием приводных двигателей лебедки в качестве тормозных машин; для установок бурении иа средние глубины - системы с электромагнитными индукционными тормозами; для установок бурейня иа небольшие глубины - системы с электромагнитными ферропсфош-ковыми тормозами, которые могут дополнительно выполнить функции регулятора подачи долота прн бурении. 17.2.3. Расчет влектронриводов буровых механизмов Электропривод бурового иасоса. Мощность и другие параметры привода в номинальном режиме выбираются исходи нз заданной производительности и давлении для наименьшего диаметра поршни. При других диаметрах поршня все требуемые параметры будут, рбеспечены заведомо, поскольку мош- ность при этом остаетси неизменной. Несходимая мощность приводного электродангателя, кВт, определяетси выражением Рда= <гРа.с-10- /%асПред. (17.1)
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


