
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода § 16,31 Управление куэнечно-првссовыми машинами 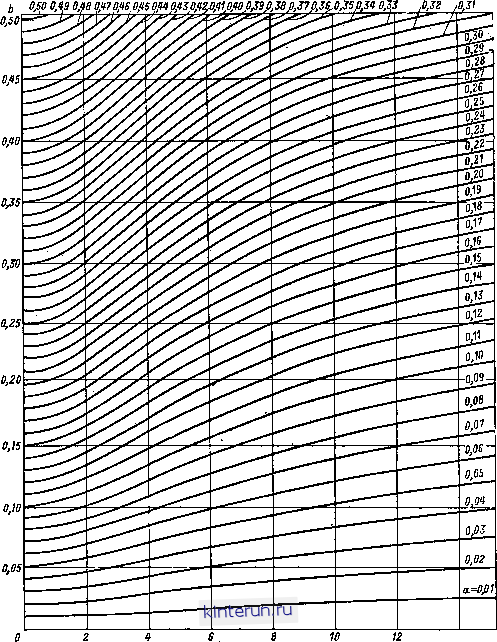 Рис. 16.3. Семейство зависимостей промежуточных величин а я Ь для расчета момента ннерцнн привода. 16.3. УПРАВЛЕНИЕ КУЗНЕЧНО-ПРЕССОВЫМИ МАШИНАМИ Системы управлення КПМ строятся в завнснмостн от выполняемых функций н требований технологических процессов, т. е. аналогично схемам управлення других машиностроительных электроприводов. Характерными особенностями схем управлення КПМ являются следующие. Необходимость обеспечения условий безопасного управлення и обслуживания КПМ созданием дополнительных блокировок в схемах и применения электроаппаратуры специального исполнения. Создание схем повышенной надежности для управления узлом муфта - тормоз механических КПМ. Обеспечение контролируемого режима разгона и торможения больших маховых масс кривошипных КПМ. Применение аппаратуры и схем, гарантирующих надежную работу систем- управления в условиях повышенной цикличности, превышающей в ряде случаев 6000 коммутаций в час. Указанные, специфические для КПМ, задачи управления решаются применением в схемах специальных блокировок, дублирующих цепей и электроаппаратуры специального исполнения. К таким аппаратам относятся: кнопки управления с грибовидным толкателем серий КУ, КЕ и др.; ножные педали управления типов ПЭ1, ПП! и др.; переключатели и кнопки управления со встроенными замками серий КЕ, ПЕ, ПКУЗ и ;ф.; командоаппараты типа КА21-17; бесконтактные путевые выключатели серий БВК24 и КВД; герконовые реле серии РПГ. Большая частота включений, вредное действие окружающей среды, вибрация и удары, свойственные многим КПМ, обусловили переход на бесконтактные схемы управления. Создано и эксплуатируются много вариантов бесконтактных схем управления на базе логических элементов, транзисторных панелей и т. п. Наиболее широкое распространение получили унифицированные и серийно выпускаемые блоки управлеиия серии БУБ для прессов с частотой включений, превышающей 6000 в час. Блок БУБ-1А предначен для управления криношипными прессами, а БУБ-2 для управления ножницами, листогибочными прессами и другими КПМ, работающими по аналогичному циклу, имеющими пневмо-муфту со сдвоенным воздухораспределителем на электромагнитах ВВ-32 и оянодангатель-ный привод. Техвичешне данные бесквнтахтиых бдохвв БУБ-1А Напряжение сети трехфазное, В..... 380 Частота юна, Гц............. 60 Максимальный ток вагруэни цепи главного привода, А............... 35 Ток уСтавКи теплового реле, А.....6,3; 10; 16; 35 Выпрямленное иапряжеиие (среднее зиа-чевве). цепей питания электропвевматаче-сквх вентилей, В............. . 24i;* Количество управляемых электропвевма-тических вентилей воздухораспределителя (муфта-тормоз)................. 8 Количество управляемых электропвевма-твческнх вентилей подввжиого защитного экрана .................... 1 Ток катушки веитвля не более, А . . . . 0,93 Перемеввое ваприжевие цепи управле-иия электродвигателем, В ......... 110 Выпрямленное напряжевне (среднее зиа-чевие) пени управленвя муфтой-тормозом. В.................... 24 Перемеивое вапряжевие цепи местного освещения, В................ 24 Масса ие более, иг............ 25 Двапазон задаваемых пауз между смазками по числу ходов............1-1023 Колачество фиксированных установок по числу ходов................ . 3 Время работы электродвигателя васоса смазки до отключения после набора давления в системе, с . . .............10+3 Ноиииальвая мощность электродвигате-ля насоса сиазкв, кВт...........060 Технические данные бесконтактных блоков БУБ-2 Напряжение сети трехфазное, В . . . : . 380 Частота тока, Гц.............. 60 Навбольшаяыощиость управляемого двигателя главного прввода, кВт....... 28 Количество управляемы вспомогательвых Электродвигателей регулировки ... 2 Наибольшая мощность авляеиых электродвигателей регулировки, кВт ... 2Д Мощность управляеиого электродвигате-теля васоса сиазкв, кВт.......... 1 Количество управляеиых электроиагвит-иых вентилей воздухораспределителя (иуф-та-ториоз).................. 2 Количество управляеиых электроиагиит-иых вентилей пвевиосдувателя...... 1 ПостоЯввое вапряжение электромагнит-вых вентилей ВВ-32, В........... 24 Перемеивое напряжевне цепи управлеиия электрода вгате.пей, иуфтой-торио-ЗОИ, В....................ПО Постоянное иапряженве цепи управления муфтой-тормозои, В.......... 34 Напряжение цепи местного освещения. В 24 Напряжевне цепи освещения линии реза, В.....................24 илн Масса ие более, кг............ 160 В командоаппарате используются серий-, ные бесконтактные конечные выключатели типов БВК-24, БВК-24М, БВК-201-24. Схема обеспечивает работу пресса в следующих режимах: одиночные хода (двурукое управле- ние с блокировкой рук, без блокировки и от педали), непрерывные хода (двурукое управление); толчковый режим (двурукое управление); ручной проВорот (при отключенном электродвигателе). Конструктивно, блок БУБ-1 выполнен в виде шкафа, внутри которого на панели размещены аппараты пуска, защиты и коммутации (вводный автомат, магнитный пуска-. тель, тепловое реле и т. п.), а также транзисторный блок БТ-1. апементы управлении и сигнализации расположены на бортах блока БУБ-1; рукоятка включения - выключения вводного авто- мата выведена на левый борт, ниша с переключателями режимов и панель сигнализации находится на правом борту. Привод вводного автомата, дверка блока БУБ-1 и даерка нищи с переключателями режимов снабжены замками, запираемыми иа ключ. В дне блока смонтироианы колодки разъемов, постредством которых блок подключается к прессу и электропедаль к блоку. В дне блока также находатся отверстие, через!- которое осуществляется подвод питания ка- пряяюнием 380 В, (в газовой трубе) к верхним зажинам вводного автомата. Существенно важной частью блока БУБ-1 является транзисторный блок БТ-1, выполненный в виде основания коробчатой формы,* на котором смонтированы элементы бесконтактной схемы (диодная и . блокировочная платы, переключатели режимов) и устаиов- . лена печатная плата. (Сочленение платы с блоком выполнено иа разъюлах, что обеспечивает бьктросъемность платы при необходимости ее замены. Электрическая схема блока БУБ-1 по икциональному признаку разделша иа трн узла: уиравлетия электродвигателем привода; управлеиия муфтой; сигнализации. Скисок литературы Головая А. Т. Основы электропрввода, - М.: Госэверговздат, 19S9. - 344 с. 1 .г. Gm. fe.U. 16.3.Соколов М. М. Автонатиэироваяяый электропривод обоцелроиышлеввык мехшкзиов.- М.; Эаергив. 1969. - 63в с 16.4. Харюоыеноа И. В. Эшктрооборудо-ваввекузнечно-огтанвовочвых 111ШВВ.- М.: Высшая школа, 1970. - 188 е. 16.5. Стовоюв В. Е. Проектироваяяе и моитаж электрооборудования кузиечио-преесовых машии. - М.: Машгиз. 1962-383 с. 16.6. Электрообопгдовате кузяечво-прессо-вых ыашвв. Справочник / В. Е. Стоколов, Г. С. Усыщмш в др. - М.: Машиностроение, 1981. - 304 с. 16.7. Огрвслеваа иврыаль иузиечво-прессо-вого ыавшиоетроеиия КЯ48-4. Типовой расчет и схемы регуларуеного привода кривошипных кузнечао-прессовых маишн. - М-: изд. ЦБКМ. 1987. -.69 с Ривдел семнадцатый ЭЛЕКТРОПРИВОДЫ ГОРНОДОБЫВАЮЩИХ МАШИН 17.1. ЭЛЕКТРОПРИВОДЫ акскАВАтшюв Типовое обозначение эти х моделей рас-1шфровывается так: 17.1.1. Общие сведения ЭКС Г Совремевный одвоковшовый экскаватор - мавевреннан и подвижнаи горная машина, предназначенная для землеройных работ иа строительстве и разработке место-рояздений полезных ископаошх открытым спогабом. Экскаватор содержит комплект электрифицированных механизмов, рассчн-танных иа длительную работу в тяжелых условиях. Эт машины, начиная с ковшей в 2,5 м, изготовляются как электряческш лопаты, и как драглайны. Основное отличие экскаваторов-лопат и )у>аглайнов заключаете и в конструктивной связи ковша с рабочим обору;дованнем и способе экскавации грунта. Ковш лопат сочленен с подвижной рукоятью, а ковш драглайнов подвешен иа канатах. Кроме того, драглайны оборудуются длинными направляющими стрелами, а наиболее крупные нз них р ковшами емкостью 6 м* и более - шагающим механизмом передвижения. В соответствии с таким конструктивным признаком типовое обозначение шагаюших драглайнов расшифровывается следующим образом: 5 Ш fS. 90 А ииийющ/т - imm ешреяи 90м Остальные экскаваторы имеют гусеничный механизм передвижения. В их числе карьерные прямые лопаты, вскрышные лопаты с удлиненным рабочим оборудованием, карье-рно-строительные модели, изготовляемые в серии модификаций: прямая и обратная лопата, драглайн, кран и др.  зшяаЛатор карьерный, строитедышй, шй шшшаи Рёре- емкость ковиш.. tfi уШневное ройте odepgdo-ваиие прямой, штат В состав механического оборудования экскаватора-лопаты входят: рабочее оборудование, поворотная платформа и ходовая тележка. Рабоже оборудование включает в себя стрелу, рукоять с коваюм и механизм открывания дмща ковша. Механизм передвижения экскаватора расположен иа ходовой тележке. Экскаватор питается першенинм трехфазным током от карьерной или строительной сети электроснабжения. Энергия подается по гибкому шланговому кабелю, который подключен к вводному ящику, установленному на нижней раме. Через кольцевой токоприемник электроэнергия передается в высо-ковольтшдй распределительиьЛ шкаф, расположенный на поворотной платформе, ш-требителями жергии высокого напряжения являются приводные двигатели преобразовательных arpel-BTOB и понижающий трансформатор собственных нужд. Со стороны низшего иапряження трансформатора подключшы вспомогательные электроприводы экскава- Формиванне заданных мехшяческих xapaKTqiHCTHK главных электроприводов рбеспечивается индивидуальным элеялгропри-водом, выполненным по системе Г-Д с управлением от статических возбудителей. Генераторы электроприводов совместно* с приводным высоковольтным двигателем ском-га>1юваны в электромашинный преобразовательный агрегат. Экскаватором управляет оператор с помощью трех командрконтролле-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


