
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода зацией движения нажимных винтов. Здесь %1 и 32 - задание положения и синхронизация, $1 и $а - действительные положения механизмов, КТ - контур тока. На вход регулятора положения РП поступают задающий сигнал и обратная связь по полусумме синхронизации вводится сигнал разности скоростей Аш. Ограничения PC и УС выбираются равными, так что при насыщении PC сигнал ошибки по каналу синхронизации воздействуег га снижение скорости опережающего двигателя. 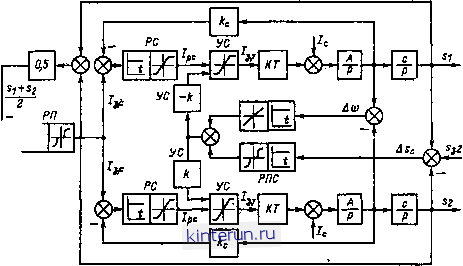 Рис. 15.59. Схема регулировании положении с электрической синхронизацией. перемещений механизмов. Систш строятся таким образом, что управлению приводами по каналу влектричестай синхронизации дается предпочтение перед управлением по каналу совместиого перемещении. Эго достигается тем, что сигнал ошибки As через параболический регулятор синхронизацин РПС подается иа промежуточный усилитель УС с коэффициентом усиления k, а сигнал на выходе регулятора скорости PC ограничен. В этом случае при достаточно большом k напряженне на выходе PC при его насыщении значительно меньше приведенного сигнала по контуру синхронизации. При насыщении PC обратная связь по скорости оказывается разомкнутой, поэтому д ля оптимальной отработки задания по каналу Регуляторы РП I! РПС имеют зону нечувствительности, исключающую выбор зазора прн перерегулировании и протекание тока при неподвижном якоре. Список литературы 15.1. Бурьянов В. Ф., Рокотин Е. С, Гуре-вкч А. Б. Расчет мощности дввгателей главных приводов пршатвых станов.М.: Металлургвз-дат, 1862. - 15.2. Бычков В. П. Электропривод а автома-твзацвв металлургвческого проазводства. - М.: Высшая школа. 1977. - 391 с. 15Л. Дружятп! И. Н. Непрерываые станы как объект автоматваацвв. - М.: Металлургвя. 1975. - 344 с. 15.4. Фядатов А. С. Электропрввод в автома-твзацвя реверсвввых ставов холодкой прокат-кч. - М.: Металлургвя, 1973. - 375 с. Раздел шестнадцать. ЭЛЕКТРОПРИВОДЫ КУЗНЕЧНО-ПРЕССОВЫХ МАШИН 16.1. ОБЩИЕ СВЕДЕНИЯ Современные кузнечно-прессовые машины (КПМ) оснащаются преимущественно индиви-дуальньш электроприводом. В ряде случаев в КПМ используется и многодвигательный привод. В электроприводах КПМ можно выделить следующие группы: 1) главные электроприводы машин, снабженных маховиками*, 2) главные безмаховипжл электроприводы машин; 3) электроприводы насосов и компрессо- ров, используемые в гидропрессах н молотах; 4) электроприводы вспомогательных механизмов механических н гидравлических КПМ [16.4-16.6]. Расчеты мощности н выбор электродвигателей для последних трех групп приводов КПМ не содержат каких-либо особенностей н производятся по аналогии с другими производственными механизмами (см. разд. 7). Некоторая специфика, свойственная всем КПМ, заключается в выборе исполнений электродвигателей по способу защиты от вредных воздействий окружающей среды, поскольку большинство этих электроприводов работает в условнях вибраций н ударов, повышенных температур горячих цехов, в атмосфере, содержащей пары воды н масла, обладающей повышенной проводимостью вследствие наличия окалины, графитовой смазки н т. п. Поэтому для подавляющего большинства приводов КПМ электродвигатели должны выбираться в закрытом обдуваемом (продуваемом), а в некоторых - даже в пожаро- н взрывобе-зопасном исполнениях. Механические КПМ с маховиковыми электроприводами являются наибольшей группой по числу типов н количеству выпускаемых н эксплуатнруел ых машнн. Сюда входят: все кривошипные прессы, ковочные машины н вальцы, большинство автоматов н ножниц, винтовые прессы н др. Специфической особенностью работы этого оборудования является резко выраженный ударный характер нагрузки, при которой статический момент сопротивления за цикл резко изменяется по различным законам от значения момента холостого хода (Мех) до максимального (Afemojc), вновь спадая до М.х- При этом для большинства кривошипных КПМ отношение Maxl. Afe,x составляет 10-30. На рис. 16.1, а приведен характерный график нзменення момента нагрузки на кривошипном валу в зависимости от угла поворота этого вала ф за цикл (от ф = О до Ф = 2я). Для некоторых КПМ график нагрузки может состоять нз большего числа участков вследствие чередования различных производимых операций. В большинстве случаев для КПМ график нагрузки содержит два участка, а прн числе нх более двух приводится к эквивалентным графикам нз двух участков [IG.l, 16.2, 16.4]. Поскольку вследствие малости отношения Фо/2л характер нзменення в пределах угла операции фо существенного значения не имеет, график нагрузки Me = f (ф) может быть приведен к прямоугольному графику, изображенному на рнс. 16.1,6. При этом Мр является средним моментом на интервале угла операции фо Мд = Ло/фо, а значение среднего момента холостого хода - М = = Лх/фх. где А, А - значения работы на интервалах фо н ф. 1рн отсутствии маховика в таком приводе момент двигателя должен по форме повторять график нагрузки и его мощность должна быть выбрана нз условия обеспечения Мах-Поскольку Мтах > Мссо, двнгатель будет недоиспользован по нагреву н работа его будет сопровождаться колебаниями скорости н резкими толчками момента и тока. Для устранения нежелательных для двигателя и сетн толчков момента н тока, а также снижения установленной мощности в приводе устанавливается маховик, обеспечивающий уменьшение колебаний нагрузки н скорости. Являясь аккумулятором кинетической энергии, маховик прн повышении нагрузки отдает вследствие снижения скорости часть накоплен- Рве. 16.1. Типовой двухучастковый график иагрузкв механических КПМ. о - действующий график; б приведенный график. ной при холостом ходе энергии н обеспечивает тем самым выполнение рабочей операции. Момент двигателя повышается незначительно, толчки тока существенно снижаются, а колебания скорости привода н машины в целом уменьшаются. Заштрихованная площадь графика Лс = ПФ) нарнс. 16.1, б со знаком - соответствует энергии, отдаваемой маховиком прн выполнении рабочей операции, а со знаком + - энергии, запасаемой прн разгоне привода двигателем в период холостого хода. Достигаемое прн этом существенное уменьшение момента Мц ах о сравнению с безмаховнковым приводом позволяет снизить устадовленную мощность двигателя для большинства КПМ в 5-15 раз, а в некоторых случаях н больше [16.1, 16.2, 16.4, 16.5]. Увеличение момента ннерцнн маховика приводит к снижению колебаний, н теоретически прн J o -> оо момент, развиваемый двигателем, Мд ->- Мер, колебания скорости А<о ->- О н мощность двигателя Рср- Поскольку в механических КПМ маховик является узлом машины, размеры его ограничены конструктивными возможностями, а частота вращения определяется кинематикой и прочностными показателями материала маховика. Выбор системы двигатель - маховик может дать множество сочетаний для мощности двигателя и момента ннерцнн маховика [16.1, 16.4, 16.6]. Оптимальное решение дает расчет, основанный на наилучшем нспользованнн двигателя по нагреву, обеспечении допустимых колебаний скорости от Мх ДО привода и получении наименьших годовых затрат на машину в целом. 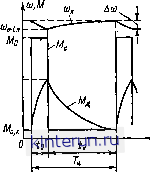 Рнс. 16.2. Зависимость момента и скорости двигателя от времени прн двухучастковом циклическом графике нагрузки. Кроме того, приводам с оптимальными параметрами (Рд; Sh и Уо) свойственны такие завнсимостн Мд = ф (О и w = / (t), прн которых за время скорость н момент двигателя достигают значений скорости н момента холостого хода к началу следующего цикла (рнс. 16.2). 16.2. РАСЧЕТ МАХОВИКОВОГО ЭЛЕКТРОПРИВОДА МЕХАНИЧЕСКИХ КУЗНЕЧНО-ПРЕССОВЫХ МАШИН , Исходные данные для расчета: Ло - работа в период выполнения технологической операции (полезная технологическая работа и нагрузочные потери энергии), Дж; - работа холостого хода (с учетом работы вспомогательных механизмов, приводимых от главного двигателя), Дж; п - число ходов машины в минуту при непрерывной работе; р - коэффициент использования ходов; et - угловая скорость маховика, рад/с; <Оо - синхронная угловая скорость дрнгателя, рад/с; <Ро - угол операции, рад. Предварительное определение номинального скольжения приводного двигателя про- изводится по табл. 16.1 в зависимости от фа к тнческого числа ходов машины в минуту Расчетная номинальная мощность двигателя D kA-\-A-i 10-3 кВт, где йз - коэффициент запаса, принимается из табл. 16.1; <ц - время цикла, с: ц = 60/ ,р; при работе машины в автоматическом режи.ме ц = 60/ х- На основании полученного значения Рр, рекомендуемого скольжения Sp и заданной синхронной угловой скорости Wo по каталогу выбирается ближайший по мощности электродвигатель [16.4, 16.6]. Поскольку выбранный по каталогу электродвигатель имеет Рнов, и 5ном. отличные от расчетного значения Рр и рекомендуемого значения Sp, производится уточнение коэффициента запаса по мощности и скольжения привода: Рнрм- 0- 7ц 5пр = = 5но1 + 5доп, где 5доп - дополнительное скольжение, обусловленное ременной передачей привода (при отсутстнии данных принимается Хдоп= = 0,01 0,02). Прн отсутствии в приводе ременной передачи 8доп = 0. Дополнительное скольжение может обусловливаться и наличием в приводе цепных (дисковых) вариаторов с фрикционным зацеплением нли других подобных узлов. В таких случаях Ядоп принимается согласно техническим данным этих узлов [16.6]. В случае, когда общее скольжение привода меньше рекомендуемого по табл. 16.1 на 20 % н более, необходимо применить короткозамкнутые асинхронные двигатели повышенного скольжения (типов 4АС, 4А0С, АС2, АОС2 и т. д.) нли искусственно увеличивать статизм двигателей постоянного тока и скольжения асинхронных двигателей с фазным ротором. В противном случае размеры маховика могут оказаться неприемлемыми. Асинхронные двигатели с повышенным скольжением предназначены для использования в маховиковых приводах, работающих с пиковой циклической нагрузкой. Номнналь- Таблица 16.1. Значении параметров к расчету мощности Двигателей
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


