
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода ратной связью по ЭДС (наприжеиню) двига- ный поток двигателя при скорости ниже ос-теля (рнс. 15.57). В этой схеме ускорение при новиой определяется максимальным уровнем разгоне и торможении определяется уровнем сигнала 4,8 элемента ограничения ЭО на 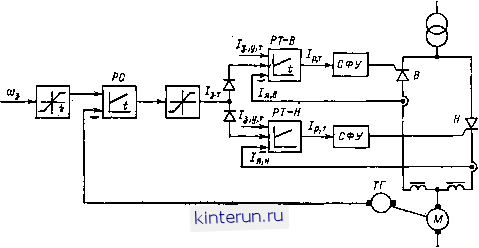 Рис. 15.54. Схема подчинеииаго регулирования дли системы УВД с контролем уравнительного тока. сигнала на иходе контура тока (/з,т). Макси- выходе. Коитур тока возбуждения идентичен мальный уровень ЭДС (напряжении) двига- применяемому в обычной схеме двухзонного теля определяется задающим напряжением регулировании. Во время разгона при при- 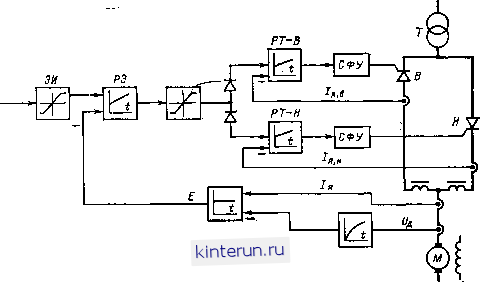 Рис. 16.66. Схема подчииениого регулирования ЭДС двигателя. £3. Разделение режимов управления ЭДС (ha-пряжением) и потоком двигатели достигается с помощью напряження смещения Еи, несколько меньшего (в иределах нескольких процентов), чем максимальный уровень сигнала обратной связи по ЭДС двигателя. Номииаль- ближении ЭДС к номинальному значению напряжение на выходеР5 начинает снижаться, что вызывает интенсивное ослабление потока двигателя. При этом дальнейший рост напряжения двигателя практически прекращается, а динамический ток определяется процессом 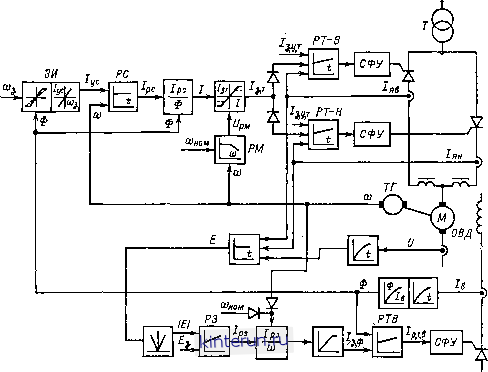 Рис. 15.86. Схема двухзонного регулирования с обратной связью по скорости. 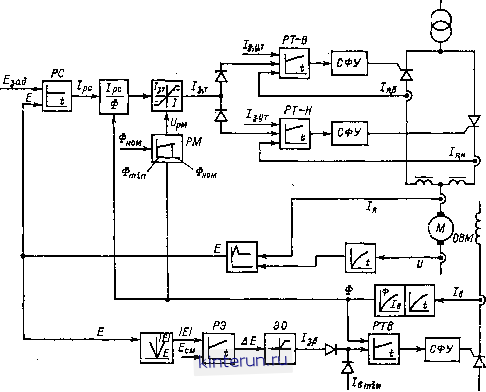 Рис. 15.57. Схеиа двухзонного регулирования с обратиой связью по ЭДО двигателя. Электропривод прокатного производства [Разд. 15 ослабления поля. Но достажении минимального уровня ноля, определяемого сигналом вШпг ЭДО двигателя возрастает до заданного значения. Пи снятии задающего £зад сигнала начинается торможение двигателя. ГЬсле иезяачительиого снижения ЭДС двигателя увеличения напряжения иа выходе РЭ происходит интенсивное усиление поля двигателя, во время которого уменьшение ЭДС даигателя практически прекращается. По достижении номинального уровни потока начинает снижаться ЭДС двигателя. Рассмотренные схемы управлеиия применяются в приводах рольгангов, ножниц, нажимных устройств, линеек манипуляторов, кантователей, подъемных столов, толкателе! и т. д. мещеиия. Позиционные системы находят применение в системах электроприводов летучих ножниц и иажимиых устройств. Как правило, эти системы в реяшмах средних и больших перемещений работают с ограничением тока и скорости даигателя. Для обеспечения быстрой отработки заданного перемещения независимо от его значения и от статического момента сопротивления регулятор положения РП (рис. 15.58) выбирается нелинейным и имеет параболическую характеристику, пропорциональную VAs, где As - разность Sfad
1>ф РТ-Н 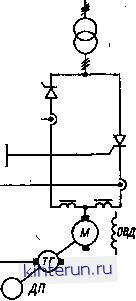 Рнс. 15.58. Схема регулирования положения. В, большинстве случаев схемы двухзонного регулирования для приводов вспомогательных механизмов (рис. 5.56, 15.57) могут быть упрощены. В частности, делительные устройства иа выходе регуляторов скорости и ЭДС, обеспечивающие оптимальную настройку соответствующих контуров при раз-Личных потоках даигателя, могут быть исключены. Регулитор скорости в этом случае настраивается обычно иа номинальный, а регулятор ЭДС - иа минимальный поток дангателн. Может быть также исключен нелинейный элемент в цепи обратной связи по току возбуждения даигателя. Некоторое ухудшение статических и даиамических характеристик в результате этих упрощений незначительно. В то же время повышается надежность схемы. К системам регулирования положения вспомогательных механизмов прокатаых станов предъявляется требование быстрой отработки заданного перемещения без перерегу-лировайия, так как перерегулирование по перемещению приводит к ударам в механических передачах при наличии люфтов и к увеличению времени отркботкн заданного пере- между заданным я действительным положениями механизма. Коитур регулироиания полснкения является внешним по отношению к контуру скорости. Источником сигнала обратной связи по положению является датчик положения ДП, установленный на валу двигателя или механизма. Для нажимных устройств с индивидуальным приводом нажимных винтов применяются схемы электрической синхронизации перемещения винтов. Приводы с электрической сии-хроиизацией обладают преимуществом перед приводами с механической связью, состоящим в уменьшении стоимости механического оборудования, улучшении динамических показателей привода за счет уменьшения приведеиного к валу двигателя момента инерции, упрощении перехода от режима совместной работы приводов к раздельной и наоборот, отсутствии иеодиозиачности взаимного положения синхронизируемых механизмов, характерной для механической связи из-за зазоров в передаче. На рис. 15.59 приведена схема регулирования положения для даухдвигательиого привода нажимного устройства с сиихрони-
|
||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


