
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Таблица 15.5. Технические даивые манипуляторов
Правая лынейка 2 перед клетью снабжена встроенным механизмом кантователя. Перемещенне лннеек производится с помощью штанг 5, снабженных зубчатыми рейками 7, которые находятся в зацепленин с шестернями S, приводимыми от двигателей 6. Правые линейки и левые лннейкн имеют независимые системы электропривода. ::h- BblxaB металла \:.\ Клть метпаллй Рис, 15.49. Кинематическая схеиа лввеек мавв-пулнторов. Суммарный момеит статического сопротивления, приведенный к валу двигателя где Мх - момент, необходимый для перемещения линеек манипулятора; Mj--момент, необходимый для перемещення слитка; Мз - момент, необходимый для правки искривленной полосы. Расчет статических моментов и мощности электродвигателя манипулятора нужно вести для той пары лииеек, которая несет двигатель в механизм кантователя. Момент сопротивленяя с учетом составляющих, Н-м, rpit Ml - момент, необходимый для преодоления скольжения линеек манипулятора по направляющим, Н-м; М\ -момент, необходимый для преодоления трения качения зубчатых реек по бандажам реечных шестерен, Н-м; Sffii - суммарная масса деталей, приходящаяся на трущиеся поверхности ползунов линеек, кг; 2 nig - суммарная масса деталей, катящихся по бандажам реечных шестерен, кг; ш - диаметр реечной шестерни, м; (ii - коэффициент трения скольжения линеек по направляюпщм (при стальных направляющих и бронзовых вкладышах на пол- зунах лннеек ii= 0,15); f - коэффициент трення качения реек по бандажам реечных шестерен, равный 0,1 см; i - передаточное число редуктора; т) - КПД редуктора. Величины Sffii н Smj определяются по формулам: S ян=тл1-Ь/Яла-}-тк-Ь-д- (S тг+ШтУ, S i =2Em sA где Отд - масса линейки перед клетью (лннейкн, несущей [механизм кантователя), кг; /Яда - масса лннейки за клетью, кг; - масса кантователя с элекгропрнводом, кг; 2/Пш-суммарная масса толкающих штанг линеек манипулятора, кг; /пз-масса штанги и шатуна кантователя, кг; коэффициент /з учитывает, что только часть веса штанг приходится на трущиеся н катящиеся поверхности. Момент, необходимый для перемещения слнтка по роликам рольганга, где/Яс, - массаслнтка,кг;щ - коэффициент треиия скольжения слитка по роликам, определяемый по таблице в разделе рольгангов. Момевт, необходимый для правки слятка, Н-м. где F - усилие, развиваемое линейками при правке слнтка, Н. Эго усилиб приближенно определяется по формуле где I - длина спрямляемой части полосы, мм; Oj - предел текучести прокатываемого металла, МПа; S - пластический момент сопротивления сечеиня прокатываемого металла, мм*. Усилие F для практических расчетов берется из табл. 15.5. Линейное ускорение и замедление линеек манипулятора, м/с*, dm Мп - Мс . Ti 7 где МпяМ - пусковой и тормозной моменты двигателя, Н-м; Ми,т-момент, развиваемый механическим тормозом (если он установлен), Н-м; J -момент инерции, кг-м*. Предварительный выбор двигателей производится в соответствии с общими правилами по диаграмме статического момента за цикл прокатки слнтка, которая строится на основе программы перемещення лннеек. Эта программа составляется с учетом расположения калябров прокатных валков, кантовок, правки металла и т. д. Проверка двигателей по нагреву может быть произведена по известным методам эквивалентного момента нли тока по нагрузочной диаграмме двигателей, рас- Вткяропгпвод прокатного производства [Разд. IS счатаякА с учетом момеита инерции, пряве-денного к Baxjr аввгакяя, и яиимамячесжих моментов {цжроагове и торможении привода. Манипулятор относятся к мехаиишаи с большим числом включений в час, достигающим в отдельных случаях 2000-2200 при продолжительности включения, часто пре-вьвнакяцёй 40 %. Необходимый диавазои регулирования скорости механизма равен 10:1. Электропривод должеи обеспечивать экскаваторную характеристику. Для привоаов линеек применяются двигатели постоянного тока мощностью порядка нескольких сотеи киловатт. В последнее время отказываются ot применения механических тормозов для линеек манипулятора, все шире применяют беэредукториые приводы, позволяющие снизить запас кинетической энергии и делающие безопасной празку слитка при подходе к иему лииеек с большой скоростью, а также дающие аоэможвость увеличить ускорение привода. 15.5.2. ЭлектрояН1Воды я системы питания двигателей всшмиогатедьных механизмов Для привода вспомогательных механизмов применяются АД или ДПТ. Последние могут питаться от нерегулируемой сетя постоянного тока, по системе Г-Д или от управляемого вентильного преобразователя. Питание от сети постоянного тЬка применяется для приводов небольшой мощности, ие предъ- 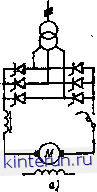 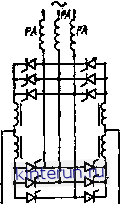 Рис. 1Б.Б0. Мостовые схемы преобразователей для пвтаняя дввгателей вспомогательвых мехаииамов. ЯВЛЯЮЩИХ особых требоввяий к (стродей-ствию или к регулированию скорости или тока. Мощность приводов в этом случае ограничивается допустимыми током контактов и частотой включений коитакториой аппаратуры. В случае системы Г-Д в качестве приводного двигателя для геиератороа применяются синхронный или асинхронный двигатели. При ееитильиом приводе питание двигателя осу- ществяяется от пфисторяых преобразовать лей, повсеместно вытесняющих ртутные, тиристорные преобразователи обычно соединяются по мостовой схеме (рис. 15.50, а). В нереверсивных привода :с обычно предусматривается динамическое тсрможёиие двигателей. Для реверсивных приводов применяется встречно-параллель:;ая схема соединения преобразюателей (ркс. 15.50, б). Возможно бестраисфор.маторное питание такой хемы от сети через анодные реакторы РА. В случае механизмов с редкими реверсами, к которым ие предъявляются требования высокого быстродействия (например, рольганги яли вертикальные валки черновой группы клетей непрерывного стаиа), может быть применена схема с нереверсивным преобразователем в цепи якоря и реверсивным тиристорным преобразователем в цепи обмотки возбуждения. 15.5.3. Системы управлеиия вспомогательными механизмами Несмотря иа большое разнообразие функций, выполняемых вспомогательными механизмами прокатных станов, задачи, стоящие перед лектроприводами этих механизмов, имеют много общего: ограничение тока даигателя в соответствии с его перегрузочной способностью, поддержание или изменение по определенному закону скорости, отработка заданного перемещения. При регулировании потока возбуждения двигателя схема должна обеспечить разделение режимов управлеиия напряжением и полем даигателя. ограничение максимального и минимального уровней тока возбуждения, ограничение максимального уровня ЭДС даигателя номинальным значением и т. д. Схемы управлеиия приводами переменного тока в целом ие отличаются от известных типовых схем (см. разд. 8). В электроприводах постояииого тока большое распространение получили системы подчииениого регулирования, В системах Г-Д обычно применяются три коитура регулирования с соответствующими ретуляторами (по числу больших постоянных времени): коитура напряжения генератора, тока якоря и скорости двигателя. Регуляторы напряжеиия генератора РН и тока двигатели РТ, компеисирукицие соответственно электромагнитные постоянные времени обмотки возбуждения генератора и цепи якори, представляютсобой ПИ-звеиья (рис. 15.51). Иногда для повышения быстродействия системы коитур напряжения генератора исключается, а компенсация обеих постоянных вршеии осуществляется в регуляторе тока РТ, являющемся в этом случае ПИД-звеяом (рис. 15.52). В системах УВ-Д схема регулирования скорости обычш)состоит из контура тока и коитура скорости. Регулятор .тока при этом представляетсобой ПИ-звеио. Коитур скорости иногда заменяют контуром ЭДС или контуром напряжения (рис. 15.53). В однократно-интегрирующих системах регулятор скорости РС являетси П-звеном (рис. 15.51); а в двукратно-иитегрируницнх ности распространение за последнее время, системах - ПИ-звеном (рис. 15.52, 15.54). примейяется один ре17Лятор тока, охвачен: В однократно-интегрирующих системах кон- ный о<атиой связью по току якоря двигателя I РТ I hU-iZlJ-li 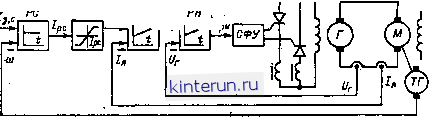 Рис.. 15.61. Трехковтурная схема подчиневиого регулирования для системы Г-Д. тур скорости настраивается по модульному (рис. 15.53). В схемах с согласованным уп-оптимуму, а в даукратно-интегрнрующих - равлеиием комплектами вентилей путем кон-по симметричному оптимуму. Возможны про- троля за уравнительным током применяются 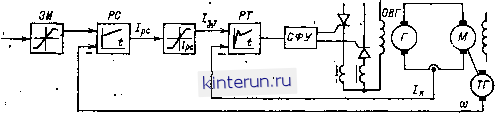 Рис. 15,52. Двухкоитурная схема подчиненного регулирования для системы Г-Д. межуточные настрЬйки контура скорости путем шунтирования регулируемым резистором кондеисатора в цепи обратиой связи ЗИ РН Р> h,t РТ /рт X  Рис. 15.53. Схема подчннеиного регулирования для системы УВ-Д с раздельным управлением. ПИ-регулятора скорости. Задатчик иЯТенсив-иости ЗИ обеспечивает требуемый закон изменения скорости во времени при разгоне Я торможении. В реверсивных системах с параметрическим согласованием регудировочных характеристик преобразователей, а таКже при раздельном управлении преобразователями, получившем благодаря надежности и экономич- отдельные регуляторы тока для каждого комплекта вентилей. В этом случае регулятор охвачен обратной связью по току соответствующего комплекта вентилей (рнс. 15.54). тогда в системах вентильного привода применяется дополнительный виутрениий контур с обратной связью по напряжению преобразователя. Применение этого контура связано со спецификой работы вентильных преобразователей фежимы прерывистого тока, зоиа нечувствительности и т. д.). Схемы с регулированием по напряжению или ЭДС даигателя (рис. 15.53, 15.55) вместо регулирования по скорости обычно уступают в быстродействие и качестве регулирования схемам с обратиой связью по скорости. Однако они не требуют применения тахогеиераторов, и там, где к качеству регулироваиия не предъявляются жесткие требования, применение этих схем вполне опраадано. При регулируемом потоке возбуждения даигателя, как правило, применяется схема даухзониого регулирования с задатчиком интенсивности и обратной связью по скорости двигателя (рнс. 15.56). В случаях, когда по технологическим условиям и допустимым механическим На грузкам возможны разгои и торможеиие двн гателя с динамическим током, равным мак симально допустимому току даигателя, может быть применена схема даухзониого регули-рбвання без зидатчика вВтеясивибсти, с об-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


