
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода 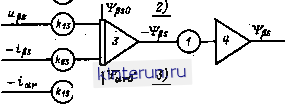 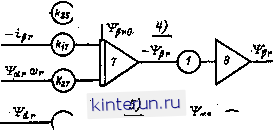
-Уд ©-1 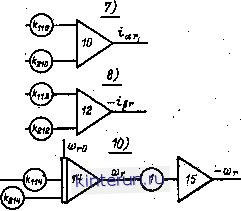 Pbc. 3.33. Схема модели АД в осих а, Ру 0. -t т- 10 шш нумерации решающих. устройств соответствует иумерацин уравнений. Сд! ла лодели ДД в ОСЯХ а, Р, 0. Уравне- пч м- по ; i i \-яия АД относительно высшей производной > ~ щ *о Вг; ) хЛ 1 -*А) % (1 -*г**) ХИ1 -*Л) X, (1 -*А) . Схша модели приведеяа ,на ряо. 3>33. Блок-схема состоит из 15 операционных усилителей (1-15) и четырех блоке произведения (БП1-БП4). Задание иа интегоато-ры /, 3, 5, 7, 14 начальных условий д, aso> аго. Чрг 0. Шл производатсн я сортвет-ствий с начальнымсостоияием АД.-Знаяеиия машинных коэффициентов рассчитываются по формулам: *19 = Ш = 29 = *211 = 19 -; Таблица 3.3. Параметры сиихроииых двигателей мощностью 65-480 кВт Alio = 818 A210 = Aii2 = /i!iio/fej; *113 = A2i3 =-q-p ,114=814 2 ©0 m,-2 P 0) 3.1.7. Синхронные электродвигатели (СД) Для нерегулируемых по скорости электроприводов генераторов постоянного тока, центробежных и поршневых насосов и компрессоров, вентиляторов, аглоэксгаустеров, газо- и воздуходувок, различного вида мельниц, дробилок, ножниц и пил, черновых клетей прокатных станов и т. д. СД нашли широкое распространение. В сочетании с управляемыми муфтами они применяются и для регулируемых по скорости электроприводов, например буровых установок. Особенно целесообразно применение СД в тех случаях, когда питающие сетн имеют низкий cos <р вследствие большого числа потребителей реактивной энергии. Используя естественные свойства отдавать избыток реактивной энергии прн потреблении активной, можно регулированием возбуждения СД компенсировать недостаток реактивной энергии в сети. Номинальный cos <Рном СД носит, как правило, опережающий характер. Обозначения типа даигателя расшифровываются следующим образом: С - синхронный, Д - двигатель, Н - нормальное исполнение, С - специальное исполнение, 3 - закрытое исполнение, П - продуваемый под избыточным давлением, К - компрессорный, Б - буровой, Т - в тропическом исполнении, М - машина. В двигателях типа МС и МСЗ число 320 обозначает серию, третья цифра серии, поставленная вместо нуля, указывает габарит машины (16-й габарит - цифра 1, 17-й - цифра 2 и т. д.) после черты в виде дроби в числителе указывается число пакетов (условная длина статора), в знаменателе - число полюсов. В двигателях ДС и ДСЗ первые две однозначные цифры характеризуют габарит, последующие две - число пакетов статора, через черточку - число полюсов. Выпускаются СД-с числами полюсов 2, 4, 6, 8, 10, 12, 16, 20, 24, 28, 32, 36, 40, 48, 60. Значении параметров синхронных двигателей мошлостью 55-400 кВт в относительных единицах приведены в табл. 3.3. Уравневия СД в отвосительных единицах. Положительные направления осей d, дв скоростей показаны на рнс. 3.34. Предполагается наличие трех контуров по продольной оси -статорного, возбуждения.демп- Параметр Индуктивное сопротивление рассеяния статорного контура а Индуктивное сопротивление рассеяния продольного демпферного контура Ждэ Индуктивное сопротивление Рассеяния поперечного демп-ерного контура хц Индуктивное -сопротивление рассеяния обмоткн возбуждения Xf Индуктивное сопротивление реакции якоря по продольной оси xii Индуктивное сопротивление реакции якоря по поперечной осн Хад Активное сопротивление статорного контура Активное сопротивление обмоткн возбуждения Активное сопротивление продольного демпферного контура Активное сопротивление поперечного демпферного контура Значение 0,07-Ojai 046 0.077-0,163 0,12 0.058-0,13 0,094 0.117-0,300 0,666-1,65 1,16 0,374-1,035 -оМ- 0,06-0,008 0,029 0.007-0,0008 0,0039 0.082,0121 0,047 0,082-0,029 0,086 Примечание. В числителе показаны интервалы изменения параметров, в знаменателе - средние значения параметров. Первая цифра числителя соответствует двигателям меньшей мои1- числителя соответствует двигатели мси&шсл мощности. Значения параметров приведены в относительных единицах. ферного и даух - по поперечной - статорного и демпферного. Уравнения СД в координатных системах А, В, С и d, q, О приведены в табл. 3.4 Решение уравнений электрического равновесия контуров относительно токов и по-токосцеплений позволяет определить электромагнитный момент СД н решить уравнение движения. Однако выполнить это аналитически в общем случае невозможно вследствие наличия в уравнениях статора нелинейно- 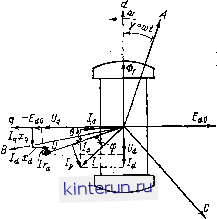 Рнс. 3.34. Расположение осей координат и векторная диаграмма перевозбумсденного СД. Таблица 3.4. Уравнения СД в относнтельиых единицах В трехфазных координатах А, В, С В координатах d, d, О Дифференциальные уравнения Операторные уравнения Уравнения напряжений di dV d4ff l-fl-dT- -в9-а? + .? Уравнения по-токосцеплений. В осях ABC взаимные индуктивности между фазными обмотками н между ротор-нммн и фазными обмотками являются функциями углового положения ротора AWA + b*AB + CAC+ + fAf + taAsd + , > эв; РВА*ВА + В*В+С*ВС + + fBf + sdBsrf + aq*B e; = A*CA + b CB + C + + /Cf + ed C3d + Uq*c ii; ( iAtA + (B*fB+ ic*fC + Vid = A*adA+ в *adB + + c dC + tf*adf + di>di W f = a 0A + В э*В + э* Wad + / ad + arfed: здесь д:-.ДГ-(-* ; 9=V+<j: fad + ef. Уравнения электромагнитного момента М -2[(Тс-в)> + -(-(>1-)-Рс)в+ . + {B-P)c]/3V3 Отсутствует Уравнение движения стей типа произведений текущих переменных - ЭДС вращения. Численное решение проводят с использованием ЭВМ. Обычно используются два способа лннеарнзацнн уравнений для нх аналитического решения - запись уравнений в приращениях н предполо-жеине постоянства угловой скорости. Линеаризованные уравнения удобно решать операторным методом. Расчет статических характеристик СД. Асинхронный режим. Расчет проводится прн постоянстве угловой скорости с использованием схем замещения СД по продольной (рнс. 3.35, а) и по поперечной (рнс. 3.35, б) осям, которые соответствуют уравнениям электрического равновесия этих контуров, приведенных в табл. 3.4. Питающие СД напряжения по осям d, q в асинхронном режиме являются гармоническими функциями частоты скольжения: Uoo&st; и sin St, 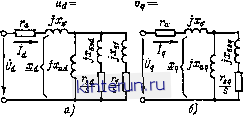 Рис. 3.35. Схемы замещения СД. а - по продольной оси: б по Ьоперечнов оси.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


