
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода § 15.31 &AeKipo$tptfeod непрерывных станов горячей прокатки но может находиться несколько заготовок. Эти станы состоят из 8-27 рабочих клетей с горизонтальными и вертикальными валками. Выходная скорость прокатки составляет 15-35 м/с. Диапазон регулироваиия D = = 6:1. Проволочные непрерывные станы выполняются, различных конструкций. В последние года нашла широкое распространение схема с четырехниточной прокаткой в черновой группе клетей, с двухниточной прокаткой в чистовых клетях (рис. 15.27). Между группами клетей обычно устанавливаются петлевые ямы с петяерегуляторами. Количество клетей в этих станах составляет до 40. Выходная скорость прокатки 25-40 м/с. Требуемый диапазон скоростей D = 4 : 1. Электропривод непрерывных станов должен удовлетворять требованиям отработки юрпсоор pood: mm -mm -mm- Рис. 15.27. Cxesra расиоложеиия клетей четырех-ииточиого проволочного стаиа. / - черновая группа; 2 - первая промежуточная; 3 - вторая промежуточная; 4 чистовая группа. ударного Приложения нагрузки в процессе захвата металла и ведения прокатки прн соблюдении постоянства секундного объема металла, обеспечении требуемого диапазона, раздельного и совместиого управления клетями непрерывной группы. Статические характеристики должны обеспечивать перепад скорости при приложении нагрузки от 2 до 0,1 %. Меньшие значения относятся к более быстроходным станам. Динамический перепад скорости ие должен пре-аышать 0,5-3 %. Диапазон регулирования в зависимости от типа стана находится в пределах 2 : 1-6: 1. 15.3.2. Электроприводы я систеяш управления непрерывных ставов горячей прокатки Электропривод непрерывных групп современных прокатных станов осущесталяется от двигателей постоянного тока, кртсфые получают питание от общих шин или от отдельных источнюЕов питания. В электроприводах кепрерывньа станов используют, как правило, групповой привод, когда один двигатель приводит во вращение два рабочих валка. Индивидуальный привод, когда каждый рабочий валок вращается от отдельного двигателя, не иснольауется. питаяи ет 0бщяк bwh фяс. 15.28) разгон всех дангателей непрерывной групш клетей и регулирование скоростя осуществляется изменением напряжения якорей. Для индивидуального изменения - скорости каждого прокатного двигателя используется обмотка возбуждення, получающая питание от ioiioJioJioJ п<- гк jmrY -rmnrt. -rmrru Рис. 15.26. Cxeita литания электроприводов от общвх шив. тиристорного преобразователя. В силу значительной инерционности контура возбуждения такая схема питания используется для ТНХО.ХОДНЫХ групп некоторых заготовочных и сортовых станов. При питании от отдельных источников (блочное питание) обмотка якоря каждого приводного даигателя подключается к нида-видуальному преобразователю. Прн блочном питании обмотка якоря каждого приводаого даигателя непрерывной группы питается от нидавидуальиого преобразователя (рис 15.29, а). В таких схемах для индивидуального регулиронання скорости даигателя используется как обмотка якоря, так я возбуждения. Грубая настройка скорости осу- 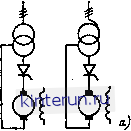 Рис. 15.29. Схема блочвого питания электроприводов. ществляется изменением отпаек трансформаторов и тока возбуждения даигателя. Тонкая подстройка скорости достигается ишеиением угла регулирования преобразователя. Блочное питание имеет следующие преимущества по сравнению с питанием от обшцях шин: меньшеевремн восстановления скоростя после захвата металла валками; более широкий диапазон регулирования; облегчается ошиновка вследствие снижения токов короткого замыкания. Схема блочного йитаиия (рис. 15.29, б) используется для большинства сортовых. 1фоволочных, заготовочных и листовых прокатных станов. С повышением мощности силового привода для питания отдельных прокатных клетей, что относится только к листовым широкополосным станам, потребовалась установка двухъякорных двигателей нли двух двигателей, питаемых по восмерочиой схеме (рис. 15.30). Восьмерочные схемы обладают следующими преимуществами: они обеспечивают равномерную загрузку якорных цепей двигателей и позволяют снизить пульсации выпрямленного напряжения включением первичных обмоток трансформатора каждого преобразователя по различным схемам в треугольник и звезду. Для улучшения энергетических показателей системы электротривода непрерывных станов применяются трансформаторы с автоматическим переключением отпаек в широком (до 33 %) диапазоне регулировании напряжения. Использование отпаек позволяет изменять выпрямленное напряжение, не меняя Рис. 15.30. Восьмерочные схемы питания электроприводов. угол регулирования а преобразователя, тем самым не ухудшать cos ф. Такие схемы широко используются для проволочных, мелкосортовых и в последнее , время листовых станов. В металлургической промышленности значительно увеличилась скорость прокатки (до 15-20 м/с) на широкополосных станах. Захват металла в последних клетях непрерывной группы при широкой и тонкой полосе и высокой скорости прокатки затрудняется из-за аэродинамического эффекта, способного загнуть полосу вверх, и металл не попадает в рабочие валки. В связи с этим захват металла производится при скоростях 10-12 м/с (на выходе чистовой группы) с последующим разгоном до номинальной скорости. После выхода металла из клети необходимо быстро затормозить двигатель до заправочной скорости. Для выполнения этого технологического режима нашли применение различные схемы питания двигателей. В схеме рис. 15.31 торможение осуществляетси изменением магнитного потока двигателя, а в схеме рис. 15.32 - изменением полярности напряжения преобразователя. Так как режим подтормаживаиия скорости валков после выхода полосы ие требует большой мощности, инверториая группа преобразователя (рис. 15.32) менее мощная, она нагружена до (0,3-0,5) Риом* Большинство двигателей непрерывных групп прокатных клетей не требует частого торможения, в связи с этим наиболее широкое распространение нашли схемы с дииами- 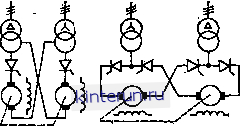 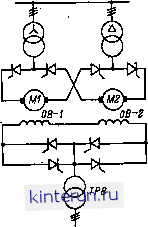 Рис. 15.31. Схема торможения двигателя изменением магнитного потока. ческим торможением, позволяющие остановить двигатель или осуществить подтормажи-вание при перестройке скоростного режима стана. г®-@1  Рис. 16.32. Схема торможения двигателя изменением полярности напряжения преобразователя. Питание обмоток возбуждения двигателей непрерывных групп осуществляется от общих шин и от индивидуальных источников энергии. В последнее время чаще используют индивидуальные источники питания, в качестве которых используют тиристорные преобразователи или магнитные усилители, 15.3.3. Схема управлении главного привода чистовой группы широкополосного стана На широкополосном стане горячей про катки осуществляется прокатка листовой стали толщиной 1,5-10 мм, шириной до 2000 мм прн скоростях 15-20 м/с на выходе нз чисто- вой группы. Для обеспечения нормального вхождения тонкой полосы в валки необходимо иметь скорость захвата на уровне 10-12 м/с с последующим одновременным разгоном всех клетей чистовой группы стана до установившейся скорости прокатки. Отсутствие калибра в листовых станах требует прокатки с натяжением, причем для обеспечения высокого качества полосы натяжение должно быть постоянным и минимальным. Высокие скорости прокатки и ударное приложение нагрузки предъявляют высокие требования к статическим и динамическим показателям электропривода. чатого регулирования напряжения вниз на 66 %, что позволяет вестя прокатку в чистовой группе клетей на низкой скорости при малозарегулированных преобразователях. Обмотки возбуждення ОВД-! и ОВД-2 соединены последовательно и питаются от отдельного преобразователя ТВ. Схема управлення электроприводом является типовой и может использоваться с некоторыми упрощеннямя для любого стана. В ней используются основные элементы системы УБСР-АИ - такие, как операционные усилители постоянного тока; источники питания; датчики тока и напряжения; функциональные преобразо- H3Z ЗИ И31 PC БО-Т РТ БО-К СУ-Н 1РВ-В -С J БИУТ От шин заправочной. . скорости. От ишн совместного уско- а Р - - От мтлеасржателеи <=Л СП ЛПУ- СУ-В грв-н 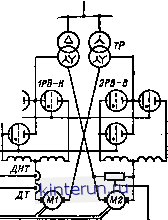 учн. Ручн. Авт. -ЭДС W-3C J, * БО-ТВ РТВ СУ ЗВОВ Рис. 15.33. Фуикпиоиальная*схема главного привода чистовой Группы широкополосного стаиа. Современные схемы управлении главных приводов чистовой группы строятся по принципу подчиненного регулирования с применением унифицированной блочной системы регуляторов (УБСР-АИ). Функциональная схема главного привода чистовой группы широкополосного стана представлена на рис. 15.33. Силовая часть привода включает двухъякорный двигатель, включенный по восьмерочной схеме с питанием от ртутного преобразователя РВ. Для питания преобразователя используются два трансформатора, один из которых имеет соединение первичной обмотки в треугольник, а второй - в звезду, что позволяет снизить пульсации выпрямленного напряжения. При расширении диапазона регулирования скоростей электрического привода изменением напряжения на якоре используются трансформаторы с отпайками для ступен- ватели для воспроизведения нелинейных функций и воспроизводства операций умножения и деления. Схема управлення рнс. 15.33 состоит нз трех основных частей: схемы регулирования напряжением якорной цепн двигателя; схемы регулирования тока возбуждення и схемы задания скорости. Схема управлення якорным напряжением двигателя содержит систему упрввлеиия преобразователей (СУ- В и СУ - Я); логическое переключающее устройство ЛПУ; ПИ-регулятор тока РТ, блок ограничения угла БО-а; Пи-регулятор скорости PC: блок ограничения тока БО-Т, блок изменения уставки тока БИУТ, задатчик интенсивности ЗИ и два инерционных звена И31 и И32. Схема управлення током возбуждения двухкоитурная (контур тока возбуждення и контур ЭДС), построенная по зависимому принципу регулирования. Контур тока возбужде-
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


