
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Таблица 3.2. Расчеиые соотношеиня для разиых схен соедивеивй обмоток Ад в режиме динамического торможения Вариант Суема. соединения обмоток 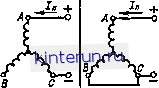 в С -   Векшрпая диаграмма.  FaFs=I Wi AB=Pcn-1 теля 5. Определяют тормозной момент двига- (BoS На рис. 3.30 представлены характеристики динамического торможения. Здесь для 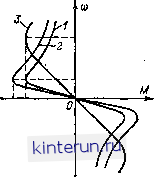 Рис. 3.30. Мехааические характеристики АД в режиме динамического торможения. кривых 7 И 3 /9кв1= /эквз; для кривых 7 и 2 tiat = h s(l) < a(S > кв2 КВ1- При одном и том же эквивалентном токе для Одного и того же значения тормозного момента справедливо соотношение rS,i)/s(3) = = s1/s3. Расчет характеристик АД на АВМ. Структурные схемы АД строятся по уравнениям табл. 3.1 в зависимости от принятой системы координат. Схема модели в осях d, q, 0. Уравнения АД относительно высшей производной при отсутствии переменных нулевой последовательности
Vdrigs - idshr) Здесь kg = xfi/x; = Схема модели приведена на рнс. 3.31. Блок-схема содержит 15 операционных усилителей (1-15) и 4 блока произведений текущих переменных (БП1 - БП4). Задание на интеграторы J, 3, 5, 7, 14 начальных условий Тда, 4,50, Yrf;.o, qro, го производится в соответствии с начальным состоянием АД. 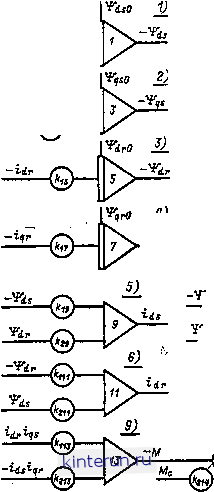
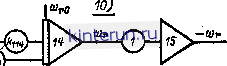 Рнс. 3.31. Схема модели АД в осих dt qi 0. i mt 10 iM нумерации решающих устройств аоответствует нумерации уравнение. Звачеввя машинных коэффициентов рассчитываются по формулам: Blip *il( = *uo JUL. Здесь и далее - масштабы переменных X, где д: - любая переменная. Модель источника питания асинхронного двигателя в координатах d, q, О аналогична модели источника питания синхроивого двигателя в этих же координатах и представлена далее на рис. 3.42, а. Схелиг модели АД е осях х, р, 0. Уравнения- АД относительно высшей производной: -= jtJ-ix 1+ya4> i 3 X fft *U4 = * U = 1) 2) 3) 4) б) Uys-iysfi-Vjctrnti 9) M=-p-g-(<;,*-Wj ): 10) -j---у-р. Схема модели приведена иа рис. 3.32. Блшс-схема состоит из 15 операционных усилителей (/-/5) и 4 блоков произведения {БП1 - БП4). Задание иа интеграторы /, 3. 5.7,14 начальных условий Vjcso. ys , лго. VysDt Шго Вроизводится всротаетсгоии с начальным состоянием АД. качения машинных коэффициентов дая этой схемы рассчитываются по формулш: *1 = *110 = 3 0 Д! ь t Р г 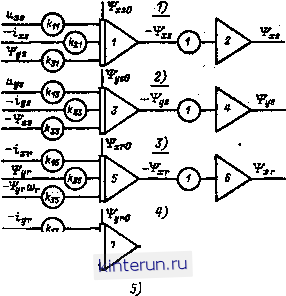
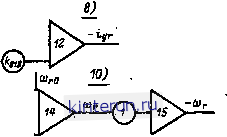 Рнс. 3.32. Схема недели АД в осях х, у, 0. i т. to аумвршия решающих уетроДств соответствует аумерациа уравиевяД.
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


