
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода г, .... ции; рода тока питающей сети и типа крано-Boio механизма. Ограничением применения магнитных контроллеров, как правило, является реализуемый с их помощью диапазон регулирования с учётом имеющейся системы 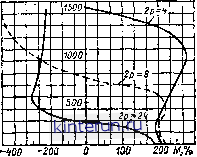 Рис. 13.7. Механические характеристики электропрнвода переменного тока прн прнменевкк двух-нлн трехскоростного АД. троприводе сложилось несколько типовых решений, используемых, как правило, для крупных и ответственных механизмов, каковыми, являются рудно-угольные перегружатели, крупные монтажные и плавучие краиы. Системы Г-Д состоят из ДПТ, получающего питание от генератора постояииого токасрегулируемым напряжением. Двигатель, 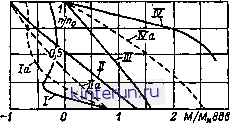 Рис. 13.9. Механвческие характеристики двух-двнгвтельного электропривода механизма передвижения на переменном токе. питания, Т. е. применение более сложных систем с электронашинными или вентильными преобразователями энергии определяется более высокими требованиями к параметрам регулирования или ограничениями, связанными с системами питания. 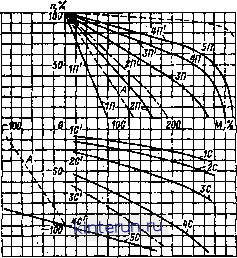 Рнс. 13.3. Мехакнческне характернстикн электропривода механизма подъема на переменном токе с динамическим торможением. U.. Среди систем управления, обладающих высокими регулировочными параметрами, система Г-Д долгое время являлась единственной, обеспечивающей широкий диапазон регулирования во всех условиях нагрузки фанового электропривода. в крановом элек- как правило, имеет независимое возбуждение с регулируемым ослаблением потока, благодаря чему в системе осуществляется регулирование скорости в сторону уменьшения путем регулирования напряжения генератора и в сторону увеличения - путем уменьшения потока исполнительного двигателя. Широкий диапазон регулирования обеспечивается без применения тахогеиераторов или иных устройств контроля скорости. 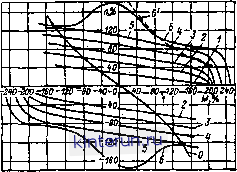 Рнс. 13.10./ Механические характеристакв электропривода подъема по системе Г-Д. Управление электроприводом по системе Г-Д осуществляется путем изменения значения и направления тока возбундания генератора. Изготовляются два типа систем управления: с релейно-контакторным регулврова-,ниём в цепях возбуждения электрических машин; с бесконтактным регулированием возбуждення при помощи магнитных усилителей. По способу питания главной цепи системы управлеиия также имеют два исполие- Т й б л и а й 13.8 ОеИбЬйые трамегт крановых электроприводов по системе Г - Д
ния: с ПОСТОЯННО замкнутой главной цепью, т. е. якорь ДПТ постоянно соединен с якорем генератора; система с коммутируемой главной цепью, когда от одного генератора поочередно могут получать питание несколько ДПТ, отключаемых и подключаемых с помо-шью контакторов, когда напряжение генера-тораравно нулю. Системы f--Д обладают хорошими регулировочными характеристиками, сравни- 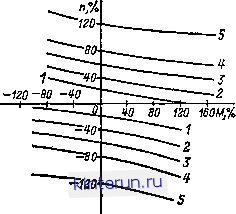 Рнс. 13.11. Механические характеристики электропривода передвижения по системе Г-Д. тельно невысокой удельной стоимостью и высоким уровнем срока службы. Однако при их применении необходимо размещать в стесненных помещениях крановых механизмов вращающиеся преобразовательные агрегаты, что и является основным недостатком, ограничивающим их применение. КроМе того, системы Г-Д требуют регулярного обслуживании и повышенных затрат иа профилактический уход. Параметры электроприводов по системе Г-Д приведены в табл. 13.8. Системы с тиристорными управляемыми Выпрямителями (реверсивными преобразо- вателями) постоянного тока УВ-Д для кранов имеют три исполнения: с реверсивным выпрямительным устройством, в котором используются два встречно включенных выпрямителя и якорь исполнительного электродвигателя, получая питание от одного выпрямителя, работает в режиме потребления энергии при угле регулирования до 90 ° и в режиме рекуперации при противоположном направлении вращения и угле регулирования свыше 90 °, при питании от второго выпрямителя осуществляются также два режима, но при противоположном направлении тока, благодаря чему обеспечивается работа во всех четырех квадрантах механических характеристик; с нереверсивным выпрямительным устройством, для измеиения направления тока используется контактный реверс главной цепи автоматически без тока, когда напряжение на выводах электродвигателя становится выше напряжения, создаваемого выпрямителем или по команде оператора при закрытом выпрямителе; с нереверсивным выпрямительным устройством, которое обеспечивает работу электродвигателя в режимах потребления энергии и рекуперации при изменении направления вращения (I и IV квадранты), а для обеспечения работы во П и III квадрантах осуществляется изменение направления тока в обмотке возбуждения электродвигателя. Первая система является наиболее универсальной, но в то же время она имеет наибольшие габариты преобразователя. Наиболее эффективным является использование этой системы в интервале мощностей 100-300 кВт. Вторая система имеет наименьшие массо-габаритные показатели, но возможность ее применения ограничивается конструктивными параметрами контактного переключающего устройства прн мощности электропривода выше 100 кВт. Третья система обладает рядом недостатков, связанных с необходимрстью. реверсирования обмотки возбуждения, и применяется в основном для мощных электроприводов (мощностью выше 300 кВт), имею- 13.2] Системы управления крановыми влектроприводами Т а б л в ц а 13.9. Освоввые параметры кравовых мектропрвводов по свстеме УВ - Д
ШИХ малую частоту включений (крупные разливочные краны). Во всех системах УВ-Д применяется устройство для регулирования потопа возбуж- В крановых электроприводах используются системы с тиристорными преобразователями частоты (ПЧ-Д), что позволяет при применении АД с короткозамкнутым ротором получить большой диапазон регулироваиия и добиться высоких динамических показа- 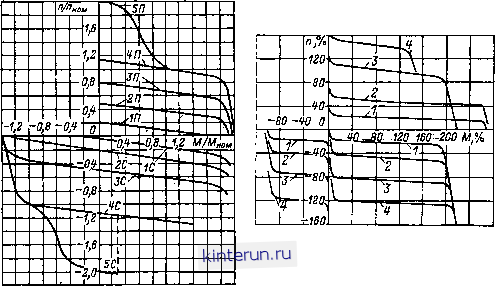 Рвс. 13.12. Механические характернстини элек-тропрнводоа подъема по системе УВ-!Д. деиия электродвигателя. Техяичесиие характеристики электроприводов йо Системе УВ-Д приведены в табл. 13.9. Рнс. 13.13. Механические характеристика электроприводов подъема разливочных кранов по системе УВ-Д. телей электропривода. Тиристорные преобразователи частоты с непосредственной связью относительно просты по схеме и конструктивному исполнению, однако могут быть использованы для формирования регулируемой частоты переменного тока в интервале 5-20Гп прн пнтаини от сети промышленной частоты. В связи с этой осрбениост!; преобразователе
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


