Таблица 13.6. Рекомендации по применению силовых кулачковых коитродлеров
Наименование
Род тока и напряженне сети
Тип и число
Тип конт-
Предельные значения мощностей, кВт, при режимах и числе включений в час
механизма
электродвигателей
роллера
До 60
До 150
До 150
До 300
Подъем Передвижение
=220 В =440 В =220 В =440 В
ДТ последовательного возбуждения
KB 101 KBIOI КВ102 KBI02
26 26 25 25
20 18 20 18
15 10 15 10
Подъем и передвижение
.-230 В ,-380 В ,-220 В ,-380 В
Один АД с фазным ротором
ККТ61А ККТ61А ККТ68А ККТ68А
24 40
60 60
30 50 50
15 20
30 30
10 10
Передвижение
,-220 В -380 В
Два АД с фазным ротором
ККТ62А ККТ62А
2x15 2x25
2x12 2x20
2x10 2x12
2X7 2X10
Подъем
,-220 В -380 В
Один АД с фазным ротором
ККТ65А ККТ65А
24 40
15 20
8 10
Основная область применения силовых кулачковых контроллеров (кроме ККТ65А)- управление наиболее простыми электроприводами режима работы Л и С диапазоном ре-
равлеиию в этих системах осуществляются с помощью командоконтроллеров, представляющих собой кулачковые многоцепные аппараты, служащие для коммутации цепей уп-
гулирования скорости не более 3 : 1 н небольшой частотой включений. Рекомендации по применению кулачковых контроллеров приведены в табл. 13.6.
Системы управления крановыми электроприводами, основанные на использовании магнитных контроллеров применяются для установок постоянного н переменного токов и имеют разнообразные способы регулирования скорости, осуществляемые с помощью релей-но-контакторных схем включения обмоток электродвигателей и резисторов. В составе магнитных контроллеров для коммутации цепей применяются контакторы с электромагнитным приводом постоянного и переменного тока; электромагнитные реле напряжения, времени и тока, резисторы, волупровод-никовые выпрямители и другие устройства коммутации и управления. Операции по уо-
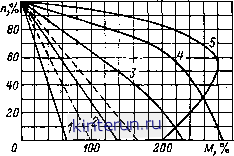
Рнс. 13.3. Механические характернстикн электропривода постоянного тока прн управленин магнитными контроллерами типов ПС и ДПС-
равлений. Основное конструкгавное исполнение магнитных контроллеров открытое 1Р(Ю, т. е. магнитные контроллеры должны встраиваться в закрытые о&мочки на самих кранах. Для эксплуатации в тропиках и на судах иевоторые типы магнитных контроллеров изготовляются в оболочках со степенью защиты 1Р44.
T a б Л В Ц a 13.7. Освовные техввчее хврвнтврвсгякя крввовых иагвитных коитроллеров
Si*.
Эксплуатацвовные условвя использова-ввй (см. разд. 7)
Тип краиввого механизма
Днапазояи регулирования скороста
Твп магнат иого контроллера #
ф ts
3 вв < о.
Тнп двигателя
Рекомендуемая аавбольшаа мощность злектродвагатМя. кВт, при режиме а числе включеавй в чао
s§
в а 9
а Во
м в о
вв X вв
до 150
Т 150-300
ВТ 300-6011
Цехв металлургн-ческДго провэводства
Механизм подъема, один двигатель в меха-ввзм нэненення вылета стрелы
330 440 330 440 S30 440
Посто
=230 =330 с=Э30 =330 =310 =330
янныД г
10 10 10 10 10 10
ПС160 ПС160 ПСЗбО ПС350 ПС630 ПС630
Рис. 13.3
ДПТ последовательного возбуждения
60 76 100 160 300
78 120 150
26 35
Цехи металлурги-ческогф проиаводетва (явнбвльшан мощность синжается на 10 %)
Механизм подъема, два двигатели
330 440 330 440 230 440
=230 =Э30 =330 =330 -220 =320
10 10 10 10 10 10
ДПС160 ДПС160 ДПС360 ДПС350 ДПС630 ДПС630
Рас. 13.3
То же
2X40
2x50
2x75
2x100
2x150
2x300
2X30
2x40
2x60
2x75
2x120
2x150
2X28
2X38
2x88
2x65
2x105
2x130
2X30 3x30 2x48 3x60 2х95 2x116
Механизм передвижения, поворота. одна двигатель
320 440 320 440 330 440
=320 =330 =320 =330 =320 =330
10 10 10 10 10 10
П160 П160 ПЗй П250
пезо пезо
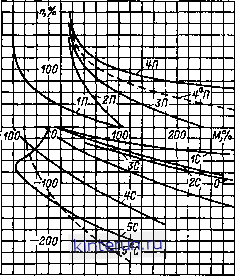
Рнс, 13.4
ДПТ последовательного возбуждения в помещении, независимого возбуждения на открытом воздухе
40 60 75 100 150 200
30 40 60 75 120 150
35 .
65 106 130
30 . 48 60 95 116
Мехаавзм передвижения, два двигатели
330 440 330
330 440
=;азо
=330 =230
=230
10 10 10
ДП160 ДП160 Д1Ш) ДП380 ДПбЗО ДП630
2x40
2x50
2x75
2x100
2x150
3x220
3X30
2x40
2x60
2x75
2x120
2X150
2X35
2X53
2x65
2x105
3X130
3x30 3x30 .3x48 3x60 2x98 3X118
Продолжение табл. 13,1
Эксплуата цнояаые условня испольэо-
Тнп кранового механизма
Диапазоны регулирования скороств
a t, В В
1 в
1
Тнп магнитного контроллера
Тнп двигателя
Рекожндуемая навбольшая мощность электродвигателя, кВт, прн режиме я чнсле включений в час
вання (см. разя- 7)
Be в a о мня
о. -
ёв S
до 150
150-300
300-600
Перем
енный л
Провэводствениые механизмы общего назначения
Механизмы подъема> одни двигатель
330 350 320 350
10 10 10
TCA161 TCA161 TCA350 TCA250
Рис. 13.5
АД с фазным ротором
55 90 50 135
45 76 65 110
68 58 100
Механизмы передвижения поворота. Одни двигатель
380 330 380
230 350 330 380
10 10 10
TA161 ТА 161 TA250 TA250
55 90 80 135
76 65 ПО
68 58 100
Механизмы передвнже-ввя, два двигателя, четыре двигателя