
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода Таблица 13.3. Допустимые ускорения краиових неивизнов .Группа кранов Значения ускорений для механизмов Литейные и крупвне монтажные краны Мостовме краны общего иазиачения Магнитные краны металлургические Грейферные портальные кранм Перегружатели руд-цме и угольные Судовые грузовые краиы Строительные башенные краны Стреловые поворотные кравы общего иа значения Контейнерные кравы 0,15 1,0 0,3 0,5 0.7 0.3 0.5 0,15 ж я s a aR a щ я . с г в 0.15 0,2 0.5 Все многообразие грузоподъемных механизмов по характеру нагрузкв электропривода объединяется в восемь групп: а) подъема груза и их модификации - механизмы замыкания грейфера; б) изменения вылета стрелы с горизонтальным перемещением груза и с изменяющейся высотой груза; в) поворота кранов или грузовых стрел; г) передвижения тележки подъема; д) передвижения грузовой каретки или канатный привод передвижения; передвижения крана (моста); ж) поворота крюков или тележки; з) механизмы, работающие иа упор (клещи, выталкиватели и т. п.). В свою очередь все крановые механизмы по режиму эксплуатации объединяются в три группы: работающие постоянно в циклическом режиме; выполняющие эпизодически или однократно грузовые операции по определенному циклу; работающие в повторно-кратковременном режиме без четкой программы. Величины, характеризукнцие нагрузку эле ктро дв и гателей крановыхмехаии змов, наиболее точно рассчитываются по формулам и методикам, принятым для расчетов крановых механизмов, если для этого есть все исчерпывающие конструктивные данные механизмов. Однако в практике при проектировании новых электроприводов, когда конструкция механизма еще не разработана, или, наоборот, при подборе электрооборудования для действующих механизмов в условиях эксплуата-кин, когда затруднительно проводить детальные расчеты, целесообразно пользоваться приближенными методами, исходными данными для которых являются грузоподъемность, значения скоростей и масс элементов Таблица 13.4. Реконзвдуеные ограничения скорости перенещеиия грузов крановыми мехавваиаиа
§13.1] Характеристики и условия эксплуатации Таблица 13.5. Эксплуатационные данные крановък неханизнов
крановых механизмов. Нагрузки, определенные приближенным методом, как правило, явлзпотся вполне достоверными, если учитывать, что фактические нагрузки для крановых механизмов являются переменными и при расчете электроприводов определяются максимальные значения, а приближенные методы имеют погрешность в сторону ббльшнх зва-чений нагрузок. Формулы для приближенного определения нагрузок крановых механизмов приведены в табл. 13.2. Предельные значении ускорения для различных типов крановых механизмов приведены в табл. 13.3. Минимальные скорости крановых механизмов определяются бсобенностями технологии переработки грузов, интенсивностью процессов перегрузки и возможностями крановщика эффективно маневрировать механизмом. Наибольшие допустимые значения минимальных скоростей крановых механизмов приведены в табл. 13.4. Эти предельные значения установлены в результате многолетнего опыта, и превышать их, так же как и номинальные скорости, не ре-комендуЬтси. В то же время не следует добиваться скоростей ниже 60 % допустимых значений минимальных скоростей. Номинальные скорости должны выбн-раиля исходя из заданной производительности механизмов, однако при этом необходимо учесть, что время операции сокращается пропорционально увеличению скорости до определенного предела. При превышении этого предела рост скорости (и мощности) не ведет к соответствующему сокращению цикла и повышенная мощность механизма используетси нерационально. Более низкие номинальные скорости могут выбираться исходя из конкретных условий работы механизмов. В результате выбора скоростных параметров крановых механизмов устанавливается диапазон регулирования, который является одним из основных факторов выбора системы электропривода. В табл. 13.5 приведены усредненные параметры ресурса крановых механизмов подъема. Остальные крановые механизмы имеют параметры иа 20-40 % ниже указанных. С учетом табл. 13.5 все элементы крановых электроприводав режима Л должны иметь уровень износоустойчивости 1,6 10* включений без тока; для режима С (кроме механизмов металлургического производства) уровень износоустойчивости должен быть не ниже 2,5-10° включений. Этот же уровень износоустойчивости следует принимать для электроприводов монтажных кравов, судовых грузовых механизмов режима Т. Остальные электроприводы режима Т, а также аяектро-приводы крановых механизмов металлургического производства режима С должны иметь все элементы с уровнем износоусийчивости.ие ниже 107 включений без тока. Все электроприводы режима ВТ должны иметь элементы с уровнем износоустойчивости до 20 10* включений. По данным табл. 13.1-\Ъ,Ь устанавливаютси значения расчетных нагрузок элек- троприводов, параметров ускорения и регулирования, а также требований по обеспечению ресурса. Эти данные являются исходными условиями для выбора системы управления электроприводом (см. § 13.2). 13.2. СИСТЕМЫ УПРАВЛЕНИЯ КРАНОВЫМИ ЭЛЕКТРОПЕИВОДАМИ Управление крановыми электроприводами всех типов и назначений производится оператором, осуществляющим визуальный прямой или дистанаиоиный контроль за грузовыми операциями. Поэтому все операции управления крановыми электроприводами автоматизируются на базе разомкнутых систем, скоростные параметры которых, атакже моменты включения и отключения выбираются оператором. Все многообразие систем управления крановых электроприводов объединяется в три группы: непосредственного управления исполнительными электродвигателями постоянного и переменного тока с помощью комплектных силовых коммутационных аппаратов, называемых силовыми кулачковым1 контроллерами; дистанционного управления исполнительными электродвигателями постоянного и переменного тока, получающими питание от сети и содержащими комплектные устройства коммутации силовых цепей, называемые магнитными контроллерами; управления ДПТ и АД с питанием их от электромашинных или вентильных преобразователей тока, частоты, напряжения. Наиболее распространенной в крановом электроприводе является система управления на основе использования силовых кулачковых контроллеров, Управление ДПТ осуществляется кулачковыми контроллерами типов КВ101 и КВ102. Первые используются для управления ДПТ последовательного возбуждения механизмов подъема. Вторые - для управлеиия ДПТ последовательного или независимого возбуждения механизмов горизонтального передвижения и поворота. Контроллеры применяются для электродвигателей мощностью до 15 кВт при напряжении 220 В и при режиме работы С и Л. Число рабочих положений по шесть в каждом из направлений движения. Схема контроллера КВ101 несимметричная с потеициометричес-ким включением якоря двигателя на положениях спуска. Схема контроллера КВ102 симметричная. Устойчивый диапазон регулирования скорости 4:1. Износоустойчивость контроллера 10* включений, исполнение по степени защиты IP44 (см. разд. 7). Механические характеристики электропривода с контроллером КВ101 приведены иа рис. 13.1. Цифры иа рис. 13.1 и далее соответствуют положениям иоитроллера. Управление АД с фазиым ротором осуществляется кулачковыми контроллерами серив ККТ60А, имеющими однотипную конструкцию и различные схемы включения. Контроллеры ККТ61А служат для управлеиия АД мощностью до 30 кВт при напряжении до 380 В. Эти контроллеры имеют по пять рабочих положений для каждого направления вращения. Они обеспечивают коммутацию обмоток статора, а также коммутацию четырех ступеней сопротивлений в цепи ротора. Контроллеры ККТ62А служат для управления двумя АД мощностью до 30 кВт, а контроллеры ККТ68А - до 50 кВт прн напряясе-нии до 380 В. Контроллеры имеют по пять рабочих положений для каждого направления вращения. Они обеспечивают коммутацию четырех ступеней резисторов в цепи ротора и управляют контакторным реверсом обмоток статора. Контроллеры ККТ65 служат для управления АД и имеют на положениях спус- 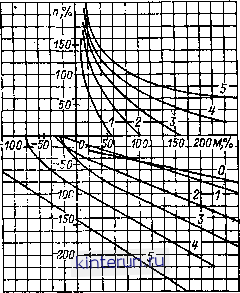 Рнс. 13.1. Механические характернстикн электропривода подъема постоянного тока при управлении кулачковым контроллером КВ1 01. ка схему динамического торможения с самовозбуждением. Эти контроллеры используются в комплекте с панелью ТРД160 и обеспечивают регулирование скорости при спуске до 8:1. В качестве устройства коммутации обмоток статоров при управлении с помощью контроллеров ККТ68А и ККТ62А используется контакторный реверсор ТР160, позволяющий коммутировать обмотки статоров электродвигателей с суммарной мощностью до 60 кВт. Все контроллеры серии ККТ60А позволяют осуществлять регулирование скорости электродвигателей до 2,5 ; I введением в цепь ротора регулировочных ступеней резисторов Типовые механические характеристики электроприводов при управлении с помощью контроллеров ККТ60А приведены на рис. 13.2, Износоустойчивость контроллеров до 2,5 10* включений, исполнение по степени защиты IP44.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


