
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода [Разд. 3 На рис. 3.24, б показаны имеющие разные по знаку скорости идеального холостого хода две пары характеристик, каждая из которых соотнетствует определенной полярности напряжения на выводах двигателя. Прн переключении контактов КМ1 и КМ2 происходит изменение полярности этого напряжения. 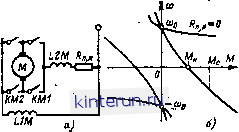 Рве. 3.24. Схеиа (а) н иехавическве характернс-такя (б) ДПТ СВ в режине ториЬжения противо-включенвеи. Дяя ДПТ СВ применяется главным образом один вид динамического торможения - с независимым возбуждением. То обстоятельство, что торможение осуществляется с неполным потоком, не играет существенной роли, так как эффективность торможения может быть увеличена ростом тока якоря прн уменьшении сопротивления добавочного ре--зистора в его цепи. Характеристики в этом случае такие же, как и у ДПТ НВ (см. рнс. 3.8, 6). Динамическое торможение с самовозбуждением оказывается малоэффективным. Торможение с независимым возбуждением прн использовании независимой и последовательной обмотки, включенной на напряжение сети через добавочный резистор, заметных преимуществ не дает, но вместе с тем существенно усложняет схему, так как необходимо переключать выводы обмотки. В связи с этим оно не применяется длн ДПТ СВ. 3.1.5. Машины переменного тока. Общие вопросы Преобразования коордвиатвык систем в электрических машинах переменного тока. Ввиду громоздкости систем уравнений машин переменного тока, записанных в реальных трехфазных системах координат, и зависимости параметров машины от мгновенного углового положения ротора В ряде случаев целесообразно вьшолнвть предварительно преобразования координатных систем, а затем проводить решение новой системы уравнений машины в преобразованных координатах. Удачной формой записи и анализа уравнений машин переменного тока, наиболее наглядно соответствующей общему явлению в электрических машинах всех типов - есте-сгаенному стремлению совместить оси магнитных потоио неподаижаой и подаижной частей машины - и позволяющей провевсти глубокие исследования и расчеты статитедкнх н динамических режимов двигателей, есть уравнения в пря1моугольных системах - Координат. Это скновано на эквивалентиости полей симметричных многофазных распределенных в пространстве систем гармонических переменных со сдвинутыми по фазе на 90° полями распределенных в пространстве двухфазных систем гармонических переменных. Прн выполнении прео(азованнй координатных систем предполагают геометрическую симметрию хотя бы с одной стороны воздушного зазора, постоянство проводимостей магнитных. цепей, отсутствие Пазовых гармоник, линейность электрических цепей машины, сосредоточенность нх параметров и ограниченность нх числа. Далее задача сводится к определению формул связи реальных и преобразованных переменных - прямого и обратного преобразонаний. Формулы связи прямого преобразования являются формулами перехода от переменных машины в реальной многофазной системе координат к переменным в прямоугольной системе координат, формулы обратного преобразования - наоборот. .lAJ 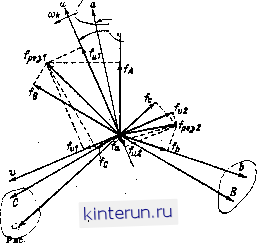 . 3.25. Полояенве осей трехфазвой в прямоугольной двухфазвой систем координат. На рис. 35 показано расщтшт дрйгтяитрльных Tgeafaaatbfi неподв1йашх ЯГай гтятпПП щтя Ypg fo скоростью ротооа <а. илрякйуголь- тП прямоугольно сягтами координат. вра1Цаюттууря R пЛтям глупа с ДВОНЗВОЛЬИОУ скоростью .Юя. . Здесь же показаны резыпрующий вектор статорных переменных /ред как геометрическая сумма мгновенных значений векторов фазных переменных статора, результирующий вектор роторных переменных /рез: как геометрическая сумма мгновенных значений векторов фазных переменных ротора и их проекции на оси и, v. Значения реаультяру-ющего вектора переменных многофазной системы в т/2 раза больше амплитуда фазных переменных, где m - число фаз исходной системы крдннат. Однако с целью Обеспече- ни я иивар1едитности парвметров мавшяы в исходной я в новой системах иоордннат в формулы прямого преобразования вводится коэффициент 2/т. Формулы прямого преобразования для переменных статора ври исходш трехфазной системе: 7=2 [Тд со <р,+ fgcos 12(Г)+ +7с (Фк+120°)]/3; +7cSin( p+12(y)]/35 Тв1=(ТА+7в+7с)/з. Формулы прямого преобразования для переменных ротора при исходной трехфазной системе Т.я=2[7 свв(ф.-р)--+7 сов<Фк-ф-120*) + +7ссов<ф.-ф+120 )1/3; 7 8=- 2 (fa sin (Фк-Ф)+ 4-7б8 п(Фк-ф-120°)+ +7* А1<ф,-ф4-1281/3} 7 =(7а+7 +/Э/3. Под перемениой / понимаются напряжении и, токи i, потокосцеплеиия. Мгновенные зиачеиия углов ф и ф показаны иа рис. 3.25. В подавляющем большиистве случаев обмотки машии соединяются в звезду, noinoMy составлиющие нулевой последовательности при этом отсутствуют. Переход от реальных трехфазных коорда-иат к прямоугольным выполняется в следующей последовательности: задаются скоростью прямоугольной системы коордаиат; записывают уравнения эаек1фического ршзио-весия контуров даигателя в реальной трехфазной системе координат для мгновенных значений переменных (уравнения электрического равновесия роторных контуров сии-хроииых двигателей записываются в роторных коордвиатах d, q, 0); с испсльэоваиием прямого преобразования выполняется переход к иовым переменным в прямоугольной системе коордаиат. Скорость прямоугольной системы координатзадается В; зависимости от характера конкретной задачи исследования. Б прак-тиие получили распростраиеиие три системы ортогональных координат. - >;стема d. а. О Tfp . ..о.оо у,, и, CJieiJiBJmr- ярятартгя r прпРтравгтюв тй5}р СП скоростью потрпя т т. Это о&де-пряэиаиная система координат для исследования электрических ашии с иесимметрией ротора - всех сиихроииых машии, а также асиизфоииых двигателей с несимметричными включениями в роторе. РтГ Jff стятпря .Чтп означает, чю В этой жтеме координат иеремек-ные статора по осям х, у не являются гармоническими фуиканямн. Поэтому она прел-почтнтельна. при изследовании асинхроииых яи. Система а. 6. в жестко связана со ста- ТОРОмГ т. ft. И UtWrrfUIHfth iii.TiftjiaW ;,~ ТТТеремеиныестаторапо осям - rap- моническне фуикоин постоянной (синхронной) частоты. Система координат а, р рекомендуется также для исследования асинхронных машви. Для иее характерно, что переменная fi является реальной переменной одаой из фаз статора. Исследование и расчет того или иного режима двигателя сопряжены с обратными преобразованиями для онеики реальных фаа-иых переменны к в исследуемом режиме, так как практические измерения переменных ведутся, как правило, в реальных коордииат-иых системах и сопоставление результатов расчетов и эксперимента в большиистве случаев проводятся также в реальных коордаиат-иых системах. Используются следукидае формулы обратного преобрааоваиия для переменных ста- юрл: Тл=7й яФ.-7л * Ф+7о1; 7в=7й я(Ф.-120 )--7л йп(ф -120 ) + 7ад; 7с-7 х (Фк+120)- -7,1А1(ф.4-12(И+7 1. формулы обратного преобразования для п>емеииых ротсфа: Гв- 7ма (ф,-ф)-Г йп (Фк-Ф) +Тп\ Г* -Гм я (Фк -ф-120 ) --7 8Ы(фж-Ф-12(И4-7м; 7е=7,а я(Ф -ф+120 )--/ 8Ы(ф -ф4-12(И4-/ . Для получения в преобрааованшкй системе координат эаектромагиитного выражения момента, развиваемого двягатедвм, используются формулы, соглжяо шпорым ов равен частной производаой от запаса электромагнитной энергии в контурах машины по геометртческому углу поворота ротор . Относительные единицы в теории и psx-четах электромеханнческих свойств электрических машин. Использование отвоситель-ных е№1ииц в теории и расчетах электроприводов позволяет упростить форму записи уравнений, избавив их от постоянных коэффициентов, облегчить численные расчеты с уменьшением вероятности ошибок, контролируя порядок зиаченнй. При этом появляется возможность сопоставить результаты исследования 0ДН01ИПИЫХ эяектродвнгатед электроприводов различной мощности, обобщить результаты исследования, вывести 1фвтери-альиые зависимости аля иссЛеа[уе а4Х режимов. Выбор базовых значений физических величин производится обычно в зависимости от условий конкретно решаемой задачи. Базовые величины могут быть разделены на независимые и зависимые. К независимым базовым величинам относятся значения тех переменных, которыми исследователь задается произвольно. Значении зависимых базовых величин определяются физическими законами связи их с независимыми базовыми значениями: В задачах электропривода в качестве независимых базовых статорных величин электрических машин принимаются такие их значения, которые в номинальном режиме обеспечили бы единичные значения этих величии: UsyiUaoui /6 = 1/нов - амплитуды иомийальных фазных значений напряжения и тока; (og = 2п/ном - синхронная электрическая угловаи скорость машины. Зависимые базовые значения определяются из следующих соотношений: полная номинальная мощность машин переменного тока, потребляемая двигателем из сети, Рб = 31/ном/во11 = ЗС/б/б/2; базовое потокосцепленне = C/g/we: за базовое значение момента принимается номинальный электромагнитный момент двигатели Мб = рРб1щ = Зр¥б/б/2, где р - число пар полюсов двигателя; базовое сопротивление Zg = иП; базовая индуктивность = в/б ~ = Ze/we; базовое времи = l/me - время поворота ротора на электрический угол 1 рад. При таких базовых значениях относительные значения момента инерции двигателей определяются как РбР* Базовые значения для вторичных контуров машин переменного тока выбираются, исходя из принципа инвариантности базовых мощностей контуров, а также равенства магнитных полей в зазоре машины, индуктируемых базовыми токами ротора и статора в симметричном трехфазном режиме. При этом взаимные индуктивности любой пары неподвижных относительно друг друга контуров машины одни и те же, а при принятом выше значении базового времени будем иметь равенство индуктивностей и индуктивных сопротивлений, выраженных в относительных единицах. Такая система относительных единиц для синхронных машин, например, известна под названием системы единиц Хдд. За базовый ток любого роторного контура принимается такой ток, прн котором магнитное поле от него наводит в обмотке статора при синхронной угловой скорости ротора ЭДС /абод = IiXad> где IiXad - ЭДС, наведенная в обмотке статора полем реакции якоря. Дяя определения базового тока обмотки возбуждения используется линейная часть кривой намагничивания (рис. 3.26), из которой /,6= i*arf где Ifi - ток возбуждения, соответствующий номиналь- ной ЭДС статорного контура. Тогда, исходя из принципа инвариантности базовых мощностей Pf6 = и fitf 6 = = (/i6/i6. определяется ( 6=3C/i6/i6/2 6: Zf6 = U,6llf6\  Рис. 3.26. Определение базового тока возбуждения синхронных двигателей. Такой же принцип в задачах электропривода положен и в основу выбора относительных единиц контура возбуждения. Здесь б=/иои; Р?б=Рб (базовая мощность машины). 3.1.6. Асинхронные алектродвигатели (АД) Наиболее широко распространенным типом электродвигателей в электроприводах являются АД в силу их простоты н дешевизны по сравнению с двигателями других типов. АД выпускаются сериями. Основное исполнение АД предназначено для питания от сети с частотой 50 Гц при синхронных скоростях от (Оо = 314 рад/с и менее. В обозначении типа АД всех серий общепромышленного применения входат буква А - асинхронный. Последней разработанной серией АД, выпускаемых промышленностью, является серии двигателей 4А, которая заменила серию А2. Двигатели серии 4А имеют стандартную шкалу мощностей прн всех скоростях вра- щення: 0,06; 0,09; 0,12; 0,18; 0,25; 0,37; 0,55; 0,75; 1,1; 1,5; 2,2; 3,0; 4,0; 5,5; 7,5; 11,0; 15,0; 18,5; 22; 30; 37; 45; 55; 75; 90; 110; 132; 160; 200; 250; 315; 400 кВт. Обозначения типов двигателей серии 4А расшифровываются следующим образом: 4 - порядковый номер серии; А - асинхронный; Н - защищенное исполнение; А - станина и щиты из алюминия; X - станина из алюминия, щиты чугунные; 50-355 - высота оси вращения; S, L, М - установочные размеры по длине корпуса; А, В - первая и втораи длины магиитопровода соответственно, приводятся, когда на одном установочном размере по длине корпуса предусмотрены две мощности; 2, 4, 6, 8, 10, 12 - числа полюсов; У - климатическое исполнение;
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


