
|
|
Разделы
 Рекомендуем
|
Автоматическая электрика Структура электропривода / , /пар выбираются из тех же сообрахкннй, что и для ДПТ НВ (см. § 3.1.2). Следует иметь в виду, что вследствие нелинейной зависимости Ф = / (/J значения Мд, обычно выше значений / .. Ддя краново металлурги-ческих двигателей, например, при 7, 3 значения Мц, 4 4,5. При /, >/ яо1 характеристаки ДПТ ПВ практичес1Ш лииеййы, поскольку незначительное увеличение потока при росте тока за коленом кривой намагиичиваняи ком-пеисирует реакцию якоря. Таким образом, в этой области результирующий поток, пересекающий обмотку якоря, практически остается постоянны ( const). Прямые, продолжающие линейные участки характеристик на рис. 3.16, б, пересекаются одной точке, так как подобные треугольники с параллельными осиования1и. о13разуемымн линиями пускового тока / и тока переключении /ер. имеют общую сторону. Например, сторона ke - общая. Расчет резисторов ступеней ведется в следующей последовательности. Задавшись значением пускового тока / в пределах допустимого и значением тока переключения /ц, = = (1,15 ц- 1,25) /нов, рассчитываем полное дополнительное сопротивление якорной цепи + /?. + /? г.-г. Строим естественную и искусстаеииую при полном добавочном сопротивлении характеристики двигатели. Линейные части характеристии продляем до пересечения в точке ключается к сетн постоянного тока коитектом КМ2 через дополнительный резистор, ограничивающий ток возбуждения в рехшме торможении, до вначеиия = U,ma а якорь отключается от сети контактом лМ/ я замыкается контактом КМ2 на сопротивление динамического тормозтаиия по схеме рис. 3.17. В этом случае характеристики имеют вид рис. 3.8, б. 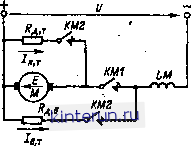 Рис. 3.17. Сзпиа дявамЕчесхого торможения при иеаавосвмон аключеиии обмотки вовбуждеиия двигателя. Во втором случае якорь замыкается иа сопротивление динамического торможеии] с последовательно включенной обмоткой всв-буждеиия - режим шами1 с яо торможении с самовозбужвев ем. Этот реяшм обеспечивается схемой ряс. 3.18, а. 0]лжггпхдьяый режим работы в точке/с, <ii>c на хараккристи-ке / рис. 3.18, б обеспечивается схемой при замкнутых контактах КМ1 и разомкнутых контактах /СЛпри иаправлеиив тока, показанном иа рис. 3.18, а штриховыми стрелками. 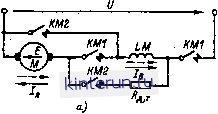 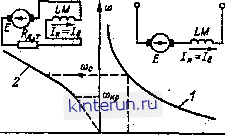 О 1с Рнс. 3.18. Схема (а) в алектронехалнческие характераствкм (б) ДПТ ПВ с самовозбуждением. %. Значения српотивлений резисторов ступеней определяются-из соотношеиня яропор-цвоиальиых отрезков при одном и том же / ~ /п значении тока. Например, при ag bh ag г Rx bd Ri ge hf Режим динамического торможения ДПТ ПВ выполняется даумя спосрбнмя. Первый состоит в том, что обшяжа. аозбуждеиия ngs- В режиме динамического торможения с самовозбуждением нельзя дрпуств1ъ изменения тока в обмотке возбуждения, таи как машина в этом случае размагнитится н самовозбуисде-ние станет невозможным. Поэтому схему строят таким о(№ааом, чтобы под дствием ЭДС двигателя Е при размыкании контактов KMVh замыкаяви КМ2 ток в обиопя возбуждении сохранил свое нап()аяяение. Тогда двигатель переходит работать иа характеристику 2 и тормозится яа ней с самовозбуждением от снЕфости щ. до скорости ( кр1. при которой хвигатель теряет способность рабо- тать с самовозбуждением и тормозится до скорости, равной нулю, по штриховой прямой при неизменном потоке остаточного намагничивания. Расчет статических электромеханических характеристик в режиме динамического торможения с самовозбуждением ведется по формуле (/я) (О --r + R . с использованием универсальной кривой намагничивания. Для задаваемых значений якорного тока вычисляется ЭДС (/д) ш = = -/ (г-\- /?д,т)> по универсальной кривой намагничивания i на рнс. 3.15 определяется М) и рассчитываетси АФ = АФ,АФном- По. кривой 3 определяется Af = / (/ ,) и рассчитывается М = ММном- Скорость определяется по формуле сй=АФсй/йФ. Расчет переходных процессов и динамических свойств ДПТ ПВ в области линейности характеристик аналогичен расчету для ДПТ НВ (см. § 3.1.2). Прн /я< /я, о линейные методы расчета переходных процессов непригодны, следует пользоваться нелинейными методами, 3.1.4. Двигатели постоянного тока со смешанным возбуждением (ДПТ СБ) На рнс. 3.19 приведена схема включения ДПТ СВ, который имеет две обмотки возбуждения: независимую ЬШ и последователь- 9> Рис. 3.19. Схема включения ДПТ СВ. ную L2M. В двигательном режиме, для ко-, торого на схеме показаны стрелками направления токов, МДС независимой и последовательной обмоток возбуждения направлены согласно. В этом режиме МДС, действующая на полюсах двигателя, определяетси суммой МДС отдельных обмоток f в = /нез + /пос= бУвез/в.вез +апос/~я. (3.19) где Шнез, Шпос - числа витков независимой и последовательной обмоток возбуждения. Магнитный поток ДПТ СВ так же, как и ДПТ ПВ, зависит от тока якоря,-а значит, и от момента на валу. Отсюда следует, что для электромеханических и механических характеристик двигателя справедливы уравнения (3.16). и (3.17). Однако в данном случае зависимость Ф (/ ) отличается от аналогичной зависимости для ДПТ< ПВ. Прежде всего эта зависимость вследствие = const будет иметь смещенное вправо по оси абсцисс начало координат, как показано на рнс. 3.20. Ток якоря, соответствующий полностью рвз- магниченному двигателю, может быть определен из (3.19) при F = О - -Fяeз/пoz Кроме того, магнитный поток двигателя определяется не только МДС обмоток возбуждения, но также и реакцией якоря. В свизн с этим вид кривой Ф (/g) будет в известной степени определяться соотношением МДС обмоток возбуждения. Из указанного положения следует, что для двигателей смешанного возбуждения прн различных значениях отношения FBez/Fnoc практически  Рис. 3.20. Зависимость потока ДПТ СВ от тока якоря. нельзя использовать универсальные характеристики. Выпускаемые промышленностью двигатели смешанного возбуждения рассчитывают-тн таким образом, что в номинальном режиме работы отношение МДС обмоток возбуждения составляет: Ршез/Рпос. иом = /иез/апос/ , иом = 1.6 2,6, Т. е. большая часть МДС обусловлена независимой обмоткой возбуждения F = = (0,615 0.72) F.oH- Эпектромеханич-еские и механические характеристики двигателя постоянного тока смешанного возбуждения, приведенные на рнс. 3.21, по своей форме приближаются 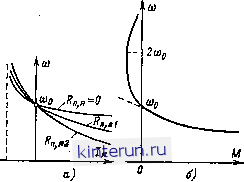 Рис. 3.21. Электромеханические (а) и механические (б) характеристики ДПТ СВ. к соответствующим характеристикам ДПТ НВ или ДПТ ПВ в зависимости от отношения МДС обмоток возбуждения. Прн одинаковых номинальных мощностях и сопротивлениях якорной цепи абсолютная жесткость механической характеристики ДПТ СВ меньше, чем ДПТ НВ, но больше, чем ДПТ ПВ. Скорость идеального холостого хода этих двигателей определяется магнитным потоком, обусловленным действием только обмотки независимого возбуждения. При указанных выше значениях /нез* = Риез/в >ном поток холостого хода составляет Фо = Фо/Фном = = 0,75 -i- 0,85, чему соответствует скорость идеального холостого ходаа)(,/сйном= 1,3-1,6. Указанные значения выше, чем соответствующие значения для ДПТ НВ, но существенно ниже, чем для ДПТ ПВ. Отметим также, что по перегрузочной способности эти двигатели также занимают промежуточное положение. Если при допустимом токе якоря /я.доп* = 2 2,5 наибольшие значения момента составляют для ДПТ НВ Мз = 2 2.5, для ДПТ ПВ Лшах. = 2-4 - 3,0, то для ДПТ СВ M ,= = 2,2 2,7. Обычно естественные электромеханическая и механическая характеристики ДПТ СВ приводятся в каталогах. В тех случаях, когда они неизвестны, их можно рассчитать по формулам (3.16) и (3.17), пользуясь универсальной кривой намагничивания Ф (в ). приведенной на рис. 3.22. Максимальная  0,5 1,0 Ь5Гвм Ряс. 3.22. Универсальная кривая наиагннчнва-няя ДПТ СВ. погрешность при таком расчете будет иметь место при токах якоря 0,75 < / 1,5 из-за неучтенного влияния реакции якоря. Эту погрешность можно скорректировать, если полагать, что при / = / ,ном магнитный поток под действием реакции якоря снижается на ДФ 0,06. Искусственные характеристики ДПТ СВ рассчитываются так же, как и-для ДПТ ПВ, по формуле (3.18). Внутреннее сопротивление двигателя определяется сопротивлениями собственно обмотки якоря и дополнительных полюсов г и обмотки последовательного возбуждения в.пос- Двигатель смешанного возбуждения может работать в тех же тормозных режимах, что и другие ДПТ. Однако тормозные режимы ДПТ СВ имеют свою специфику. В частности, при рекуперативном торможении, т. е. когда со > Шо, ток якоря изменяет свое направление, что приводит к размагничиванию двигателя. В этом случае электромеханическая характеристика двигателя при ш - - оо имеет асимптоту при / .пр = -/нез/апос. показанную на рис. 3,21, а. Соответствующая часть характеристики является продолжением характеристики в двигательном режиме и может рассчитываться по (3.17). Механическая Характеристика (рис. 3.21,6) будет иметь максимум отрицательного момента и асимптотически приближается слева к оси ординат, так как при ш оо /, р, а ф - - 0. Максимальный момент в генераторном режиме относительно невелик. Если аппроксимировать левую ветвь кривой намагничивания (при /j < О - рис. 3.20) прямой вида Ф=Ф (1-Ь- /.), \ иез / то можно показать, что наибольший момент при указанных выше /иез составляет тгаах (3 ном Имеет место при скорости ш > 2шо. Модуль жесткости механической характеристики в режиме рекуперативного торможения небольшой. Можно увеличить жесткость механических характеристик и тормозный момент, если на период торможения переключить выводы последовательной обмотки возбуждения. Однако это заметно усложняет схему включения главных цепей двигателя. Поэтому обычно для осуществления режима рекуперативного торможения последовательную обмотку возбуждения исключают из цепи якоря: ее либо закорачивают, либо выключают, как показа-  Рис. 3.23. Схеиа включения ДПТ СВ для режниа рекуперативного ториоження. но В схемах рис. 3.23, а и б. При этом осуществляется режим рекуперативного торможения с независимым возбуждением при неполном потоке возбуждения двигателя. Механические характеристики в этом случае линейны и имеют вид штриховой линии, изображенной на рис. 3.21,6. Можно показать, что прн указанном переключении переходу в режим рекуперативного торможения соответствует резкое возрастание модуля жесткости механических характеристик. Это объясняется уменьшением сопротивления цепи якоря (Гв,пос = 0) и отсутствием зависимости потока от тока якоря. При рекуперативном торможении ДПТ СВ нецелесообразно включать в цепь якоря добавочный резистор, так как помимо снижения экономических показателей это аедет к увеличению и без того высокой скорости: Ш > Шо = (1.3 -Ь 1,6) Сй о . Режим торможения противовключеиием осуществляется так же, как и для ДПТ ПВ, т. е. в цепь якоря с целью ограничения тока вводится добавочный резистор и изменяется полярность напряжения иа выводах якоря в соответствии со схемой на рис. 3.24. Механические характеристики при этом являются продолжением характеристик двигательного режима и приведены на рис. 3.24, б.
|
|
© 2010 KinteRun.ru автоматическая электрика
Копирование материалов разрешено при наличии активной ссылки. |


